Изобретение относится к устройствам для автоматической укладки штучных предметов в тару и может быть использовано в мясо-молочной промышленности для укладки фасованной мясной продукции, а также в других отраслях народного хозяйства.
Цель изобретения - повышение надежности путем обеспечения точного позиционирования подъемно-опускного стола при укладке.
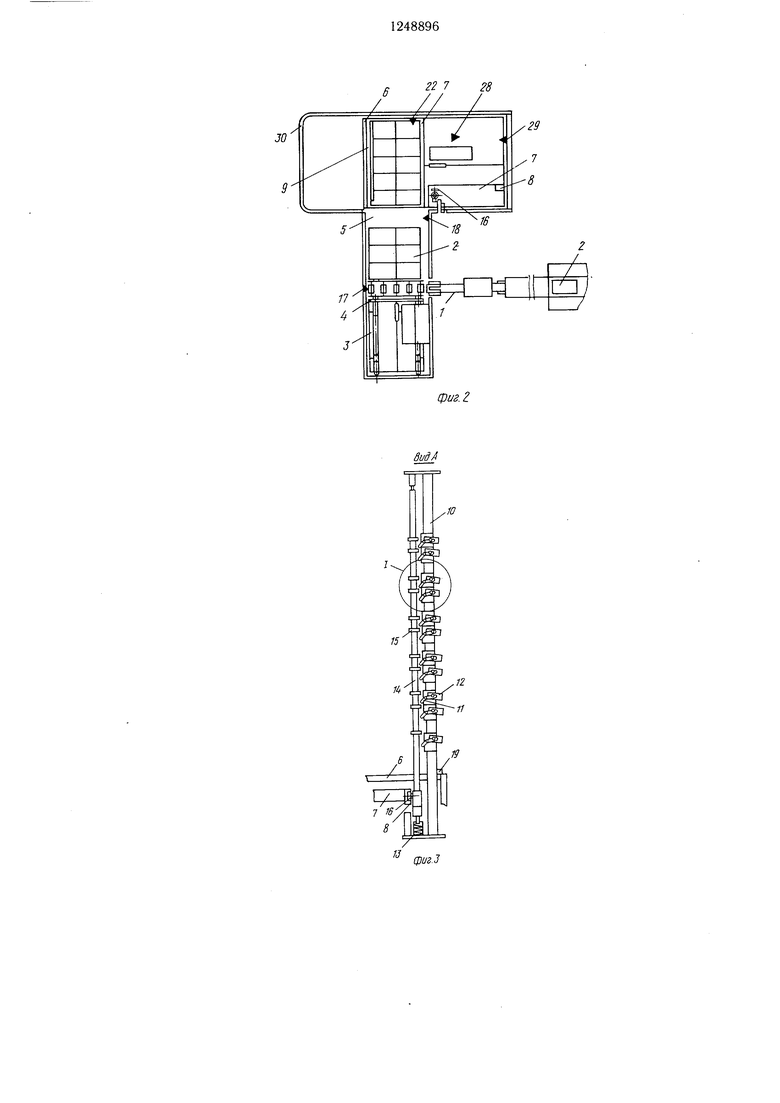
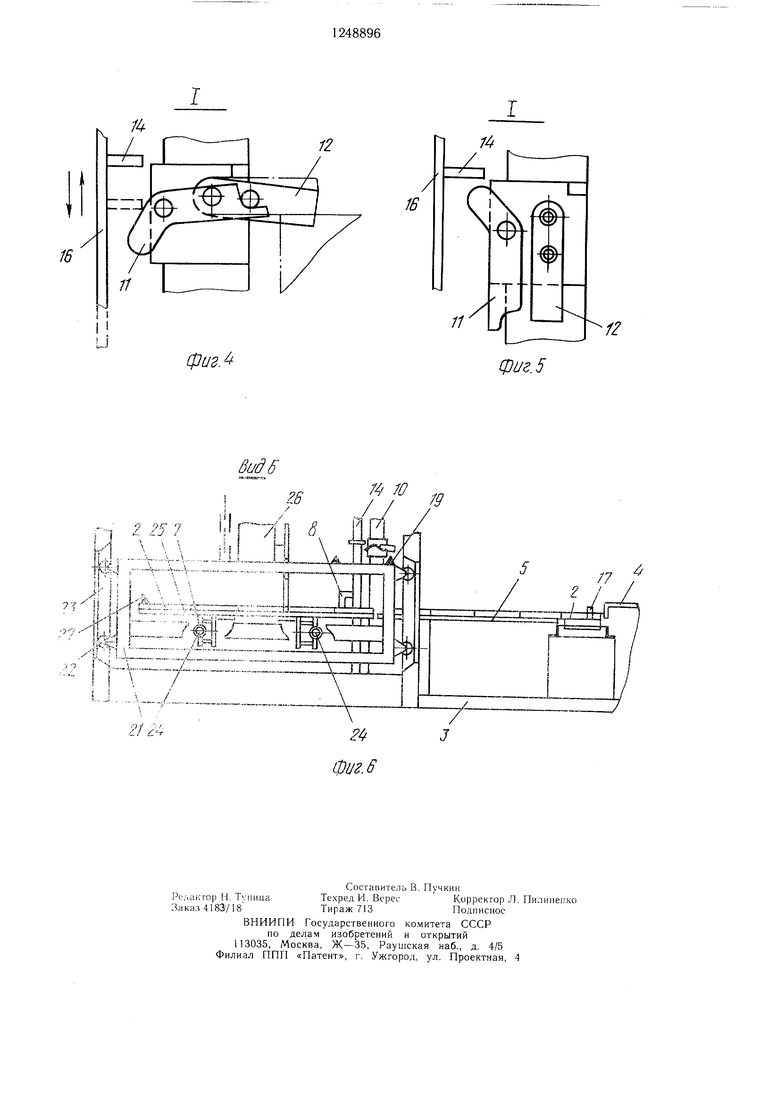
На фиг. 1 изображено устройство для укладки штучных предметов в тару, обший вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - узел I на фиг. 3 (в исходном рабочем положении); на фиг. 5 - то же (в отработанном положении); на фиг. 6 - вид Б на фиг. 1.
Устройство для укладки штучных предметов в тару содержит транспортер 1 для подачи предметов 2, механизм 3 фор.мирования слоя предметов со сталкивателем 4, накопительную каошадку 5, подъе.мно-онускной стол 6 с тележкой 7, оснащенной копиром 8 и сталкивателем 9, а также механизм адресования. Последний состоит из неподвижной вертикально размеоденной штанги 10, на которой установлен ряд двухпозиционных ограничителей перемешения подъемно-опускного стола. Каждый из ограничителей перемеше- пкя подъемно-опускного стола 6 представляет собой два рычага 11 и 12, расположенных попарно на штанге 10 с шагом, равным интервалу между уровнями укладки. Рычаг 11 имеет хвостовик и ступенчатый вырез на противоположном конце, а на рычаге 12 установлен с возможностью взаимодействия со ступенчатым вырезом штифт.
Устройство также снабжено размепхен- иой параллельно штанге 10 подвижной подУкладываемые предметы 2 подаются
транспортером 1 для подачи предметов на
механизм 3 группирования слоя предметов.
После окончания формирования ряда
предметов первый в ряду предмет упирается
5 и датчик 17, который включает привод (не показ.ан) сталкивателя 4. Под действием сталкивателя 4 сформированные ряды смешаются по накопительной площадке 5 на расстояние, равное ширине ряда. После за10 вершения формирования слоя предмет первого р.яда воздействует на датчик 18, включающий при этом механизм увеличенного хода сталкивателя, который сдвигает весь слой предметов на тележку 7 подъемно- опускного стола б и возвращается в исход15 кое положение. В конце хода предметы воздействуют на датчик 27, который включает привод 26 тележки 7.
Под действием привода тележка со слоем предметов перемещается по горизонтальным направляюнлим 24 в контейнер 30 на его дно для укладки первого слоя предметов. При этом копир 8, установленный на тележке 7, нажимает на ролик 16 и сдвигает вниз штангу 14. Упоры 15 подвижной штанги нажимают на хвостовики рычагов 11, которые, в
25 свою очередь, устанавливают рычаги 12 в рабочее положение, близкое к горизонтальному. В конце хода тележки 7 включается реверс привода тележки, которая возвра- П1,ается в исходное положение, оставляя в контейнере предметы, которые при этом
30 задерживаются сталкивателем 9. При этом копир 8 отпускает штангу 14, которая под действием пружины возвращается в исходное (верхнее) положение.
На тележку 7 поступает следующий слой
пружиненной посредством пружины 13 штан- 35 предметов, который воздействует на датгой 14, имеющей ряд упоров 15, расположенных напротив ограничителей перемещения подъемно-опускного стола и взаимодействующих с хвостовиками рычагов 11. Подвижная штанга 14 в нижней части имеет ролик 16, установленный с возможностью взаимодействия с копиром 8 тележки 7. Устройство снабжено датчиками 17 -19. Подъемно- опускной стол 6 связан с приводом 20 и состоит из рамы 21 с роликами 22, смонтированными с возможностью перемещения по вертикальным направляющим 23.
Тележка 7 установлена в горизонтальных направляющих 24 рамы 21 подъемно- опускного стола. Тележка 7 имеет накопительную площадку 25 для предметов, привод 26 и датчики 27-29. Укладка штучных предметов осуществляется в контейнер 30.
Устройство для укладки штучных предметов в тару работает следующим образом.
40
45
50
чик 27, включающий привод 20 подъемно- опускного стола, и стол вместе с тележкой поднимается по вертикальным направляющим 23 до упора в рычаг 12 на уровень укладки второго слоя предметов. При этом рычаг 11 опускается вниз. Тележка 7 со слоем предметов по горизонтальным направляющим перемещается в контейнер. В конце хода тележки 7 включается датчиком 28 реверс привода 26 тележки 7, которая возвращается в исходное положение, оставляя в контейнере 30 с помощью сталкивателя 9 следующий слой предметов.
По сигналу датчика 29 отключается привод тележки и включается привод 20 подъемно-опускного стола 6, возвращающий последний на исходный уровень. При этом рычаг 12 опускается вниз, освобождая путь для подъема стола 6 на уровень заполнения следующего слоя контейнера.
Укладываемые предметы 2 подаются
транспортером 1 для подачи предметов на
механизм 3 группирования слоя предметов.
После окончания формирования ряда
предметов первый в ряду предмет упирается
и датчик 17, который включает привод (не показ.ан) сталкивателя 4. Под действием сталкивателя 4 сформированные ряды смешаются по накопительной площадке 5 на расстояние, равное ширине ряда. После завершения формирования слоя предмет первого р.яда воздействует на датчик 18, включающий при этом механизм увеличенного хода сталкивателя, который сдвигает весь слой предметов на тележку 7 подъемно- опускного стола б и возвращается в исходкое положение. В конце хода предметы воздействуют на датчик 27, который включает привод 26 тележки 7.
Под действием привода тележка со слоем предметов перемещается по горизонтальным направляюнлим 24 в контейнер 30 на его дно для укладки первого слоя предметов. При этом копир 8, установленный на тележке 7, нажимает на ролик 16 и сдвигает вниз штангу 14. Упоры 15 подвижной штанги нажимают на хвостовики рычагов 11, которые, в
свою очередь, устанавливают рычаги 12 в рабочее положение, близкое к горизонтальному. В конце хода тележки 7 включается реверс привода тележки, которая возвра- П1,ается в исходное положение, оставляя в контейнере предметы, которые при этом
задерживаются сталкивателем 9. При этом копир 8 отпускает штангу 14, которая под действием пружины возвращается в исходное (верхнее) положение.
На тележку 7 поступает следующий слой
предметов, который воздействует на дат0
5
0
чик 27, включающий привод 20 подъемно- опускного стола, и стол вместе с тележкой поднимается по вертикальным направляющим 23 до упора в рычаг 12 на уровень укладки второго слоя предметов. При этом рычаг 11 опускается вниз. Тележка 7 со слоем предметов по горизонтальным направляющим перемещается в контейнер. В конце хода тележки 7 включается датчиком 28 реверс привода 26 тележки 7, которая возвращается в исходное положение, оставляя в контейнере 30 с помощью сталкивателя 9 следующий слой предметов.
По сигналу датчика 29 отключается привод тележки и включается привод 20 подъемно-опускного стола 6, возвращающий последний на исходный уровень. При этом рычаг 12 опускается вниз, освобождая путь для подъема стола 6 на уровень заполнения следующего слоя контейнера.
JO
ff22 7 28
/ // /
7
-29
18
-2:
1B
17- 4
i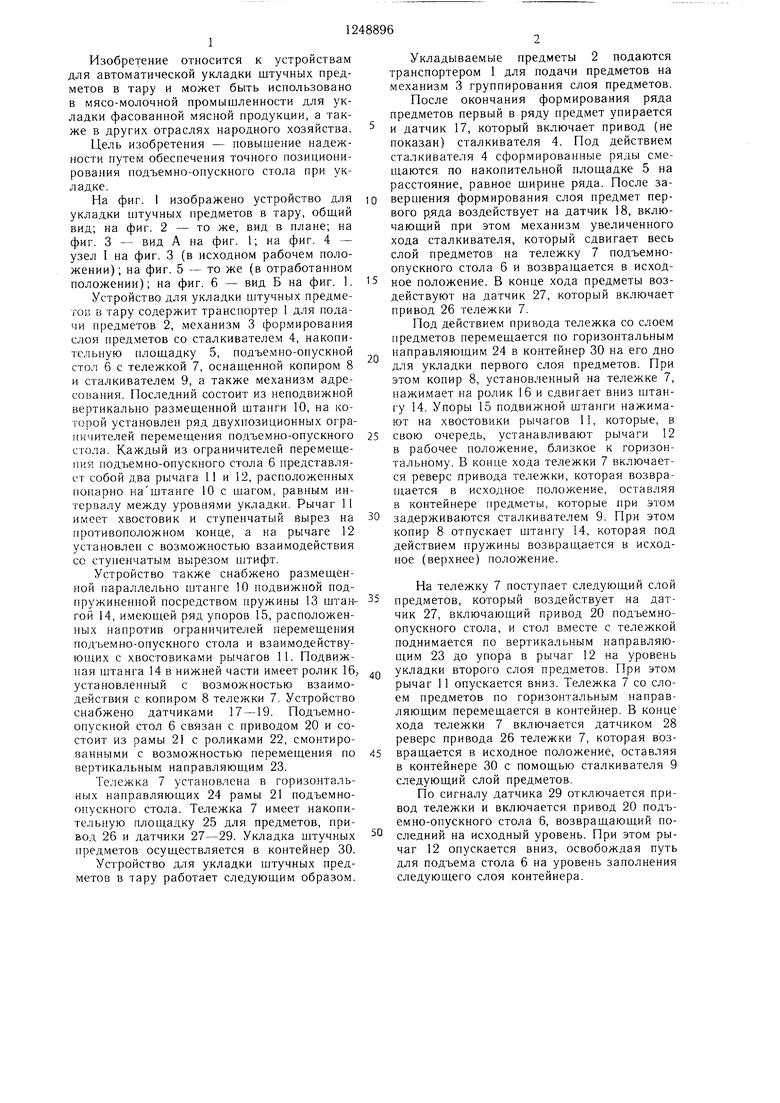
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки предметов в контейнер | 1984 |
|
SU1214528A1 |
| Агрегат для брикетирования штучных изделий | 1976 |
|
SU653136A1 |
| УСТРОЙСТВО для УКЛАДКИ в ПАКЕТ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU220143A1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Устройство для укладки в тару штучных изделий | 1984 |
|
SU1253879A1 |
| Устройство для формирования кирпича пакетами типа "елка | 1981 |
|
SU952609A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ В ЯЩИК ШТУЧНЫХ ПРЕДМЕТОВ ПРЯМОУГОЛЬНОЙ ФОРМЫ | 1972 |
|
SU432044A1 |
| Устройство для формирования пакетов изделий | 1983 |
|
SU1133200A1 |
| УСТАНОВКА ДЛЯ ФОРМИРОВАНИЯ ШТАБЕЛЯ ШТУЧНЫХ ГРУЗОВ | 1994 |
|
RU2094351C1 |
| Устройство для укладки штучных предметов в тару | 1981 |
|
SU992325A1 |

Ю
фиг.З
1В
/
11
фиг.
Ы
фиг. 5
Ц Ю
| Устройство для укладки предметов в тару | 1980 |
|
SU912593A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
