Изобретение относится к подъемно-транспортному машиностроению, в частности к устройствам для контроля загрузки кабины лифта.
Целью изобретения является упрощение конструкции, повьниение точности контроля, обеспечение комфорта для пассажиров му-- тем уменьп ения хода платформы подвижного пола.
На чертеже представлена с.хема (годвнж- HOi o пола, разрез по оси симметрии.
Устройство содержит иеподвижную раму 1 с закрепленными в четыре.х ее угла.х бло- 1чами пружин, каждый из которых состоит из пружины 2 малой ясесткости, сжатой весом платформы (ее четвертью) и ссюсно уста- новленой пружины 3 большой жесткости, сжатой (заневоленной) усилием второй ступени фиксируемой загрузки кабипы (ее четвертью). На опоре в виде указанных четырех блоков пружин 2 и 3 установлепа платформа 4, под которой помещеп упор 5, рас положенный в геометрическом центре прямоугольника, образованного четырьмя блоками пружип. Беззазорпый контакт упора 5 с платформой 4 и коротким жестким плечом двуплечего рычага 6 обеспечивается винтом 7. Винт 8 и пруж.чна 9 обеспечивают кон такт рычага 6 --- его жесткого плеча - - с конечным выключателем 10, предназначенным сигнализировать с первой ступени загрузки кабины.
Рычаг 6 шарнирно закреплен на раме 1 осью 11. Второе плечо рыча1 1 6 выполнено упругим и конец его раздвоен с возможностью взаимодействия (одновременно) с двумя концевыми выключателями 12 и 13, предназначенными для сигнализации о второй и третьей ступенях загрузки кабипы.
При этом зазоры между ветвями упругого плеча рыча1 а 6 и соответствук)Н1ими им конечными выключателями установлены различными, чтобы срабатывание этих выключателей происходило нос.тедовательрю, но по мере роста нагрузки на платформу.
Монтаж пружин в каждом блоке ocyniecr- влен посредством болтов 14, являющихся ограничителем хода пружин .меньп1ей жесгкос- ти.
Устройство работает следующи.м образом. При загрузке кабины минимально фиксируемым грузом пружины .малой жесткости каждого блока пружин деформируются. Эти дефор.мацни различны и зависят от точки приложения груза к п,. 1атформе 4. Перемещаясь вследствие деформации пружип малой жесткости, платформа посредством упора 5 и винта 7 воздействует на рычаг 6, что 11ызывает деформацию пружины 9 и поворот рычага 6 относительно осп 11. При этом винт 8 отходит от концевого вь ключателя 0, что вызывает подачу соответствующего электрического сигнала в цень управления лифтом Указанный сигнал соответствует достиже2
0
0
5
0
0
5
ПИЮ загрузки кабины минимальным фиксирующим грузом. Продолжающаяся загрузка кабины до достижения второй ступени фиксирования (загрузка, при которой отменяются нопутные вызовы кабины) перемещений пола не вызывает, поскольку деформация пружины 2 малой жесткости после достижения гфедельного значения ограничена за счет упора, пружина 3 большой жесткости не деформируется за счет ее заневолива- ния указанны.м усилием.
При достижении загрузки кабины второй ступени фиксации все четыре пружины большой жесткости деформируются соответственно нагрузке.
Перемещение платформы 4, соответствую гцее второй ступени ее загрузки через упор 5 и .винт 7, вызывает соответствуюи.1ий поворот рычага 6 относительно оси 11. При этом ликвидируется .меньщий из двух зазоров между ветвями упругого плеча рычага и одним КЗ концевых выключателей (12 и 13), что вызывает его срабатывание и подачу в цепь управления соответствующего электрического си -нала.
По аналогии с оиисанны.м происходит перемещение платформы 4 при дальнейшей загрузке кабины до третьей ступени фиксирования загрузки - наибольшей допустимой величины. При этом перемещение платформы 4, упора 5, винта 7 и поворот рычага 6 относительно оси 11 происходит при упругой дефор.мации той ветви упругого раздвоенного плеча рЕ)1чага 5, которая достигла концевого выключателя при второй, ступени фиксированной загрузки. При достижении загрузки пола третьей ступени фиксирования срабатывает последний - третий концевой выключатель (12 и 13) с соответствующей вы- ;,ачей электрического сигнала в цепь управ- .;.1е,чия.
В рассмотренном случае четырехопор- ной платформы точка взаимодействия последней с упором 4 является |-еометрическим центром четырехугольника, образованного блок а .ми пружин.
Эта точка является н.ентром жесткости системы.
В общем случае, при любом количестве пружин в опоре пола, перемещение этой точки, как и в рассмотренном случае при четырех блоках пружин, равно отношению загрузки к сумме жесткостей пружин опоры, оно не зависит от координат точки Г1рило.жении загрузки. Координаты центра жесткости, при равенстве жесткости пружин, определя.ч)тся из условия равенства расстоя- от блоков до искомой точки.
Для фиксации каждой ступени загрузки ь известном устройстве применен шарнир- но-рычажнь й механиз.м, обеспечиваюш.ий п.юско-параллельное перемещение подвижной платформы на величину, Г ропорциона.;1ь- HV1O загоузке.
1248924 34
В предлагаемом устройстве указаннаяпружин. Перемещение пола при этом опресложная шарнирно-рычажная опора заме- деляется не только величиной загрузки ка- нена простой -- в виде нескольких блоков бины, но и точкой приложения груза.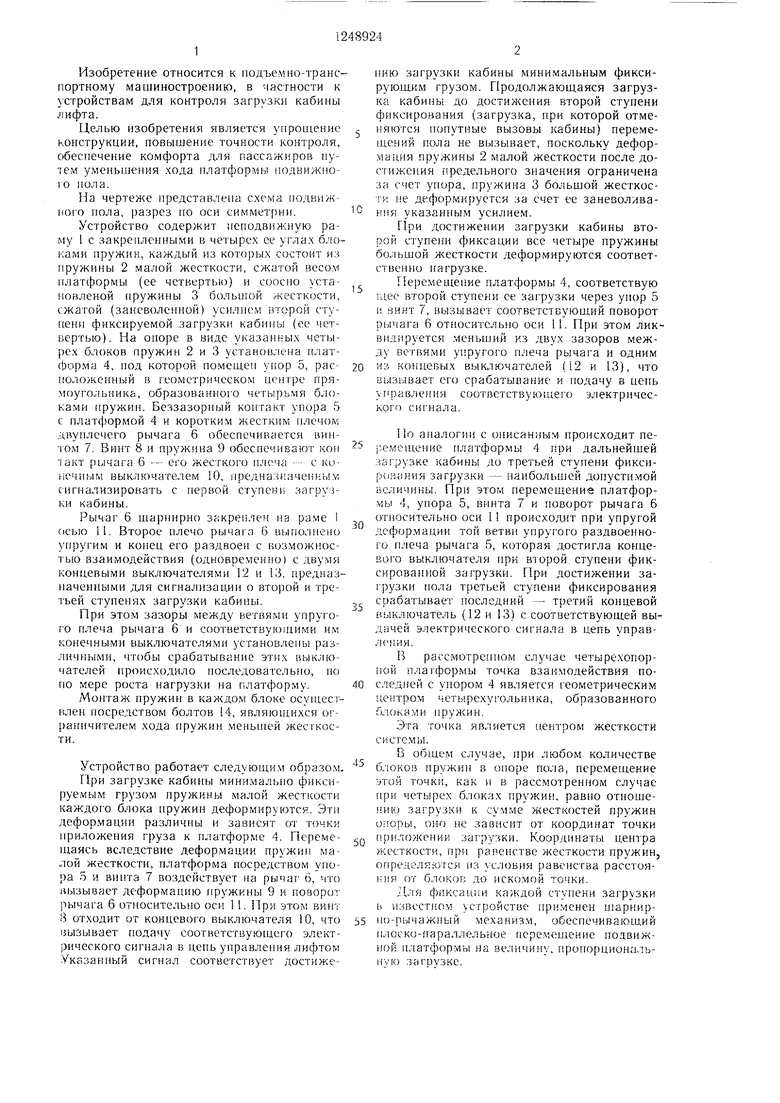
| название | год | авторы | номер документа |
|---|---|---|---|
| Канатный строительный подъемник для длинномерных грузов | 1983 |
|
SU1127833A1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| КОЛЕСО ОБОЗРЕНИЯ И ЕГО УЗЛЫ | 2001 |
|
RU2207895C1 |
| Ограничитель крайних положений кабины подъемника | 1982 |
|
SU1141061A1 |
| ГРУЗОВАЯ ПЛАТФОРМА | 1998 |
|
RU2141420C1 |
| Устройство для контроля загрузки кабины лифта | 1977 |
|
SU630181A1 |
| Строительный подъемник | 1981 |
|
SU977350A1 |
| Ограничитель крайних положений кабины подъемника | 1980 |
|
SU908725A2 |
| Пол кабины лифта | 1977 |
|
SU793915A1 |

| Устройство для контроля загрузки кабины лифта | 1977 |
|
SU630181A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
