Изобретение относится к подъемно-транспортному оборудованию, а именно к противоугонным захватам грузоподъемных кранов, передвигающихся по рельсовому пути.
Цель изобретения - повышение надежности работы.
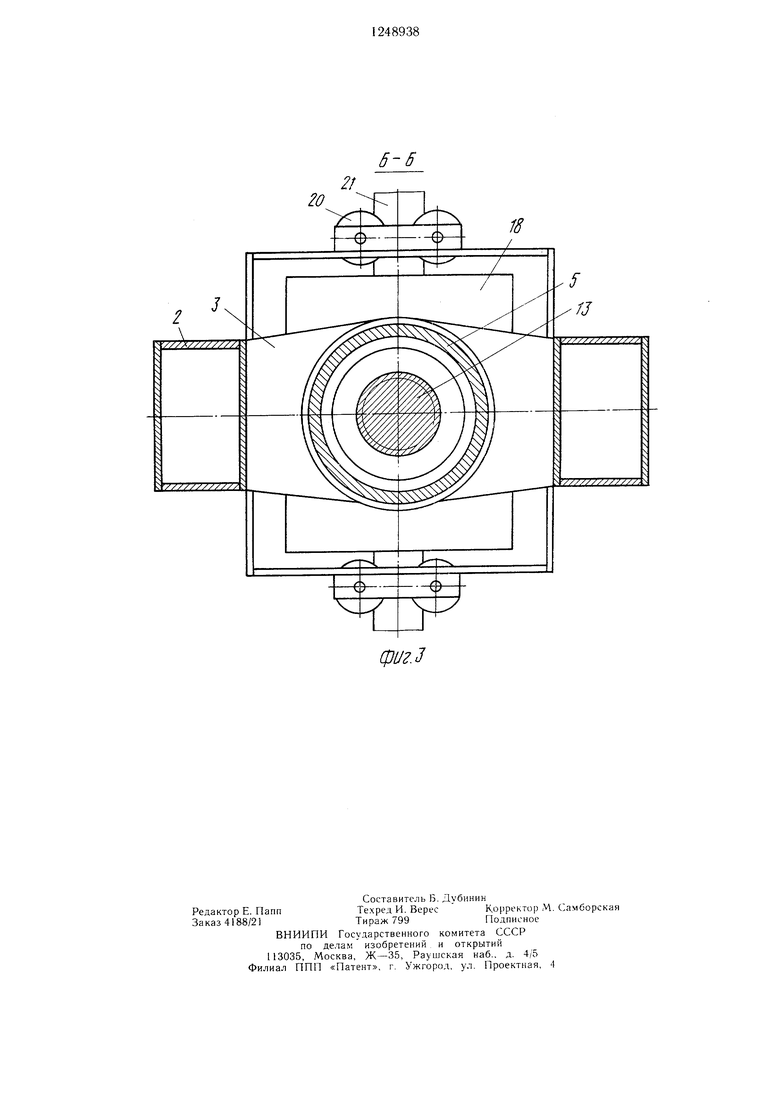
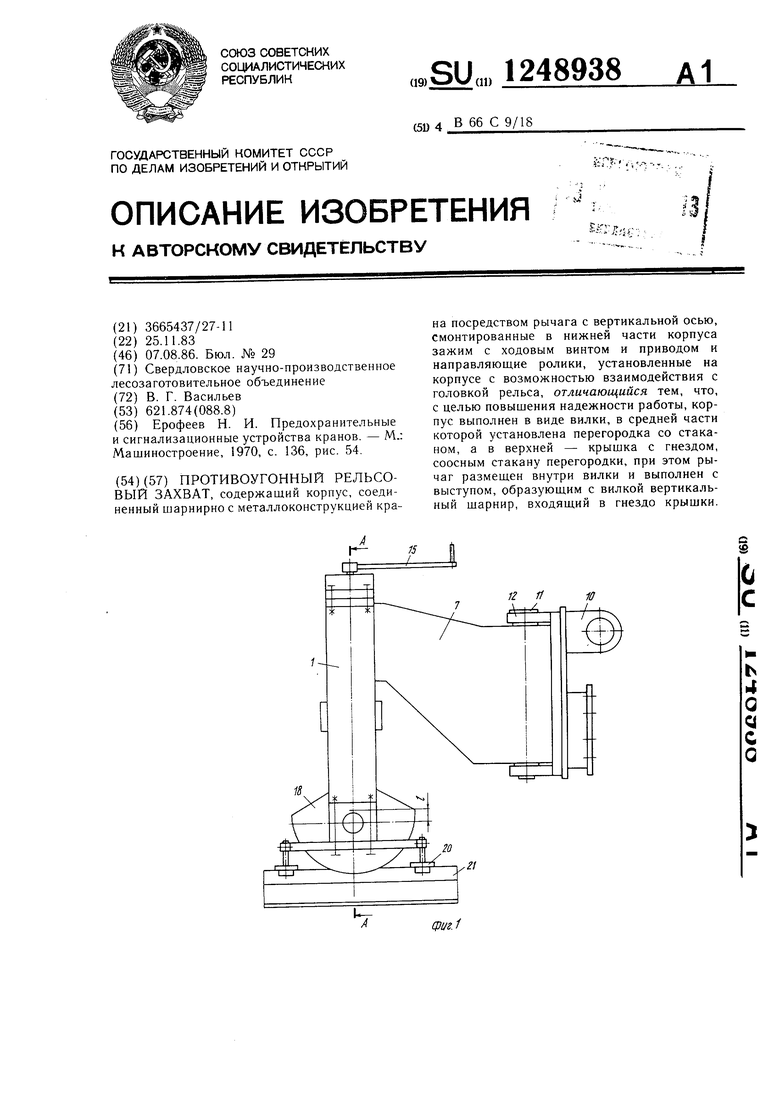
На фиг. 1 изображен захват, обп1ий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2.
Противоугонный захват грузоподъемного крана содержит корпус 1, выполненный в виде вилки 2 с перегородкой 3 в средней части и крышкой 4 в верхней части, имеющих тарельчатую форму. В центре перегородки 3 установлен стакан 5, а крышка 4 имеет соосно расположенное с ним гнездо 6. Внутри вилки 2 размещен рычаг 7, имеющий выступ 8, размещенный в гнезде 6 крышки 4, и гнездо 9, охватывающее стакан 5. Указанные элементы перегородки 3, крышки 4 и рычага 7 образуют вертикальный шарнир. Свободный конец рычага 7 соединен с металлоконструкцией 10 крана при помощи шарнирного соединения, представляющего собой вертикальную ось 11, пропущенную через закрепленные на металлоконструкции 10 проушины 12 и отверстия в рычаге 7. Внутри тела рычага 7 имеется резьбовое отверстие, через которое проходит винт 13.
Один конец винта 13 свободно установлен в стакане 5 при помощи подшипниковой опоры 14, а другой выведен наружу через отверстие в гнезде 6 крыщки 4 и оборудован рукояткой 15. В нижней части вилки 2 при помощи оси 16 на подшипниковых опо
0
5
0
pax 17 установлен эксцентриковы:; тажим 18 с клиновым пазом 19.
Противоугонный рельсовый захват грузоподъемного крана работает следующим образом.
При перемещении грузоподъемного крана по прямолинейному или криволинейному рельсовому пути направляющие ролики 20 находятся в постоянном контакте с головкой рельсов 21 и за счет вертикальных шарниров в соединениях вилки 2 с рычагом 7 и рычага 7 с металлоконструкцией 10 крана ориентируют эксцентриковый зажим 18 относительно головки рельса 21 так,что клиновой паз 19 зажима 18 всегда парал- ле, 1ен продольной оси рельса 21.
Для предотвращения угона крана под действием ветра рукояткой 15 вращают винт 13 по часовой стрелке. При этом вилка 2 с эксцентриковым зажимом 18 опускается вниз относительно рычага 7 до контакта клинового паза 19 с головкой рельса 21 и за счет эксцентриситета происходит заклинива- ние зажима 18 на рельсе и надежное удержание крана при угонном воздействии ветра.
Для приведения захвата в нерабочее положение рукояткой 15 вращают винт 13 в противоположную сторону, поднимая вилку 2 вверх и освобождая тем самым головку рельса 21.
Таким образом, предлагаемый противоугонный захват всегда правильно ориентирован относительно рельса, независимо от его отклонения в горизонтальной плоскости и локальной кривизны, что повышает надежность захвата.
20
фиг.З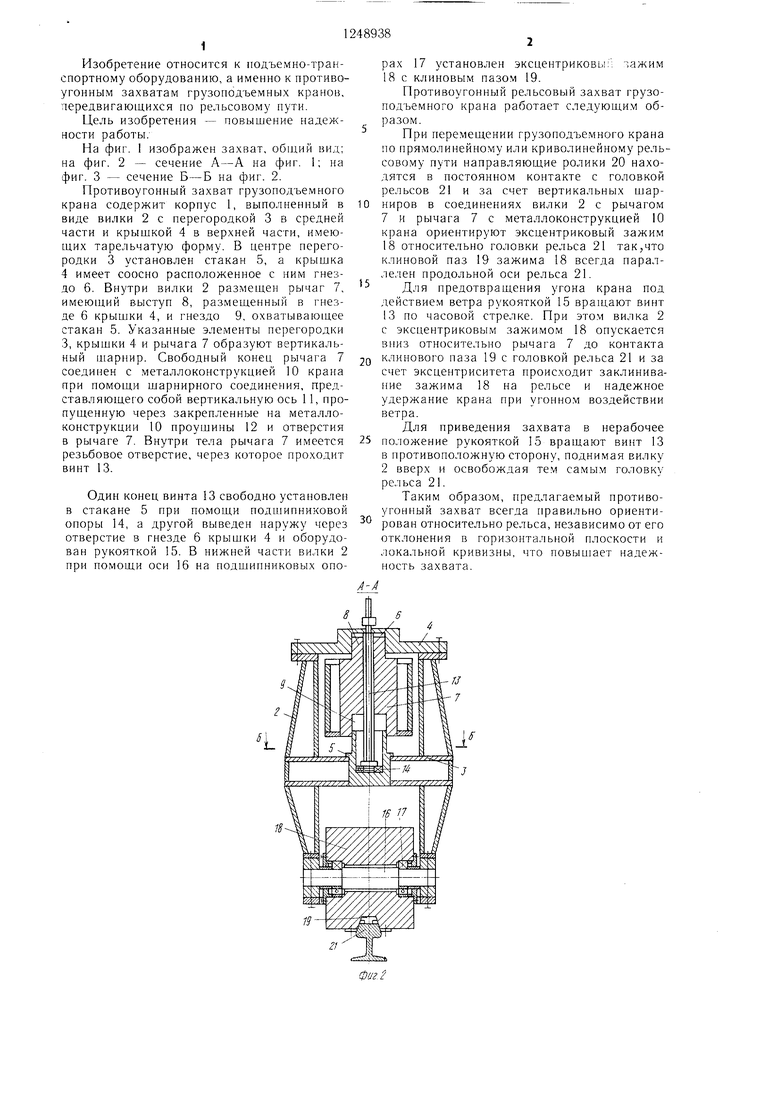
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| ПРОТИВОУГОННЫЙ РЕЛЬСОВЫЙ ЗАХВАТ | 1970 |
|
SU282631A1 |
| Противоугонный захват для кранов | 1981 |
|
SU977363A1 |
| Противоугонный рельсовый захват | 1982 |
|
SU1027132A1 |
| Автоматический противоугонный рельсовый захват | 1986 |
|
SU1384527A1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 2000 |
|
RU2225828C2 |
| Противоугонный захват для грузоподъемных кранов | 1972 |
|
SU440325A1 |
| Противоугонный захват для кранов | 1972 |
|
SU437702A1 |
| Противоугонный захват для рельсовых кранов | 1980 |
|
SU931667A1 |
| Противоугонный рельсовый захват для кранов | 1975 |
|
SU596533A1 |
| Ерофеев Н | |||
| И | |||
| Предохранительные и сигнализационные устройства кранов | |||
| - М.: Машиностроение, 1970, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
