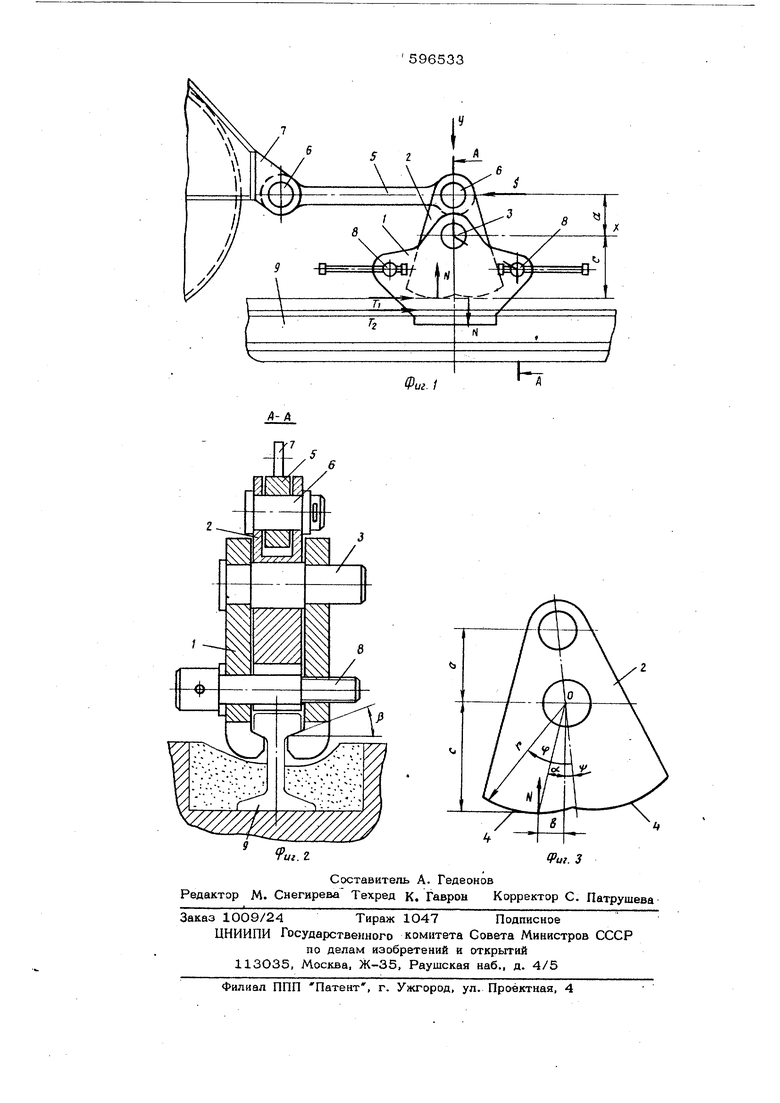
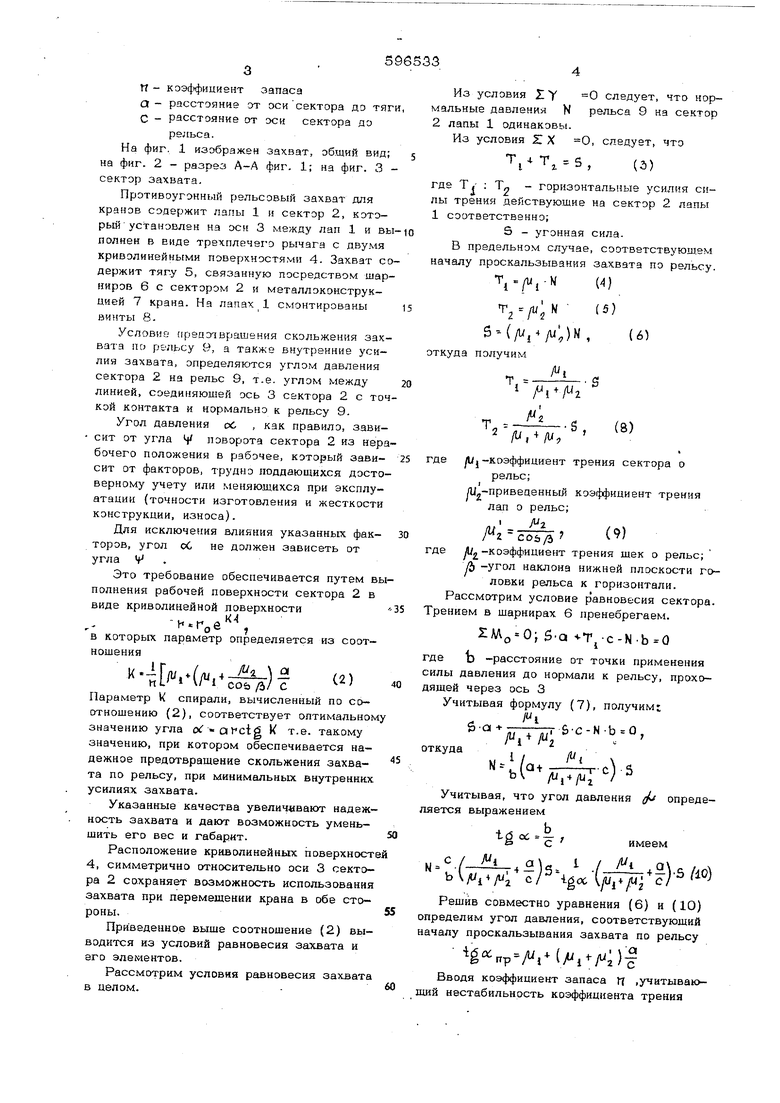
П коэ4фици9нт запаса а- расстаяние от осисектора до тяг С - расстояние от оси сектора до рельса. На фиг. 1 изображен захват, общий вид; на фиг. 2 - разрез А-А фиг, 1; на фиг. 3 сектор захвата. Противоугонный рельсовый захват для кранов содержит лапы 1 и сектор 2, которыйустановлен на оси 3 между лап 1 и вы полней в виде трехплечего рычага с двумя криволинейными поверхностями 4. Захват с держит тяг.у 5, связанную посредством шар ниров 6 с сектором 2 и металлоконструкцией 7 крана. На лапах 1 смонтированы винты 8. Условие {|р9доаврашения скольжения зах вата по рельсу 9, а также внутренние усилия захвата, определяются углом давления сектора 2 на рельс 9, т.е. углом между линией, соединяющей ось 3 сектора 2 с то кой контакта и нормально к рельсу 9. Угол давления оС , как. правило, зависит от угла V поворота сектора 2 из нер бочего положения в рабочее, который зависит от факторов, трудно поддающихся досто верному учету или меняющихся при эксплуатации (точности изготовления и жесткости конструкции, износа). Для исключения влияния указанных факторов, угол оС не должен зависеть от угла V . Это требование обеспечивается путем вы полнения рабочей поверхности сектора 2 в виде криволинейной поверхности ,e в которых параметр определяется из соотношения)1 ) Параметр k спирали, вычисленный по соотношению (2), соответствует оптимальном значению угла (xr-at ctg k т.е. такому значению, при котором обеспечивается надежное предотвращение скольжения захвата по рельсу, при минимальных внутренних усилиях захвата. Указанные качества увелич ивают надежность захвата и дают возможность уменьшить его вес и габарит. Расположение криволинейных поверхност 4, симметрично относительно оси 3 сектора 2 сохраняет возможность использования захвата при перемещении крана в обе стороны. Приведенное выше соотношение (2) выводится из условий равновесия захвата и его элементов. Рассмотрим условия равновесия зах-вата в делом. з условия Ну 0 следует, что норные давления N реяьса 9 на сектор пы 1 одинаковы. з условия S X О, следует, T.S, (3) Т.- ; Тл - горизонтальные усилия сирения действующие на сектор 2 лапы ответственно; S - угонная сила. предельном случае, соответствующем лу проскальзывания захвата по рельсу. 5-(/W{ да получим I- + /W; Л/j-коэффициент трения сектора о рельс; Ш.-приведенный коэффициент трения лап о рельс; Я/ -коэффициент трения щек о рельс; А -угол наклона нижней плоскости головки рельса к горизонтали. ассмотрим условие равновесия сектора. нием в шарнирах 6 пренебрегаем. 5:Мо 0; BQ -Tj-c-Nb 0 b -расстояние от точки применения давления до нормали к рельсу, прохой через ось 3 читывая формулу (7), получим: ct- C-N-b Q, «ч(/U,4/U, опредечитывая, что угол давления ся выражением й симеем b (vfe с)Ч/а-()ешив совместно уравнения (6) и (10) делим угол давления, соответствующий лу проскальзывания захвата по рельсу ,)| водя коэффициент запаса П ,учитывак)нестабильность коэффициента трения A/I И yU и учитывая формулу (9) получим о тимальный угол давления, обеспечивающий надежное предотвращение скольжения захва та по рельсу при минимальных нормальных усилиях ()т1 ) Захват работает следующим образом. Захват при работе крана поднят, подвешен к конструкции крана и нэ препятству перадвижению по рельсам 9. После получения штормового предупреждения, а также при остановке крана длительное время, про тивоугонный захват опускают на рельсы 9 .:и винтами 8 прижимают лапы 1 к боковым поверхностям рельса 9, предотвращая зтим смешение незагруженного захвата. При смещении крана под действием угон ной силы тяга 5 поворачивает сектор 2 до упора его криволинейной поверхности в рельс 9. При дальнейшем смещении крана происходит самозатягивание захвата, секто 2 прижимается к верхней поверхности голов ки рельса 9, а лапы 1 - к нижней поверхности головки рельса 9. При этом сектор 2 смещен относительно начального положения на угол (fJ , а угол давления сектора 2 на рельс 9 равен ОС который определяется из соотнощенйя (2) и не зависит от V При этом угонная сила S вызывает воздействие на сектор 2 и лапы 1 щеки захвата нормальных усилий N , которые обеспечивают появление сил трения Т, и Т . достаточных для уравновешивания силы 5 ,-и предотвращения этим скольжения захвата по рельсу 9. Формула изобретения Противоугонный рельсовый захват для кранов, содержащий лапы и сектор, которы установлен на оси между лап и выполнен в виде трехплечего рычага с двумя криволинейными поверхностями, а также тягу, свяаанную с сектором и металлоконструкцией крана, и привод, отличающийся тем. Что, с целью уменьшения массы, габарита и повышения надежности захвата, он снабжен винтами и шарнирами, причем винты смонтированы на лапах, а тяга соединена с сектором и металлоконструкиней крана посредством шарниров, при этом профили криволинейных поверхностей выполнены по формуле .A.4.4)-fI h -расстояние от оси сектора до ,криволинейной поверхности; ф -полярньш угол точки кринолине нейной поверхности; hjj- расстояние от оси сектора до криволинейной поверхности при , в. -основание натуральных логар }фмов Л1. коэффициент трения сектора о рельс; А/„-коэффициент трения лап о нижнюю плоскость головки рельса; /3 - угол наклона нижней плоскости головки рельса к горизонтали; 1 -коэффициент запаса; а -расстояние от оси сектора до тяги; С -расстояние от оси сектора до рельса. Источники информации, принятые во внилание при экспертизе: 1.В. К. Семенов и др. Усовершенствоание конструкции кранов, Будивельник Киев, 1965, рис. 25. 2.Авторское свидетельство № 446462, кл. В 66 С 9/18 от 15.10.74.,
| название | год | авторы | номер документа |
|---|---|---|---|
| Противоугонный захват для кранов | 1982 |
|
SU1074807A1 |
| Противоугонный захват для кранов | 1972 |
|
SU446462A1 |
| Противоугонное устройство дляКРАНА | 1979 |
|
SU839996A1 |
| Противоугонный захват для кранов | 1981 |
|
SU977363A1 |
| Противоугонное устройство для кранов, перемещающихся по рельсовому пути | 1961 |
|
SU150605A1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 1968 |
|
SU221927A1 |
| Противоугонное устройство | 1980 |
|
SU935444A1 |
| Противоугонный рельсовый захват | 1982 |
|
SU1027132A1 |
| Рельсовый тормоз | 1990 |
|
SU1763274A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |