)))
СО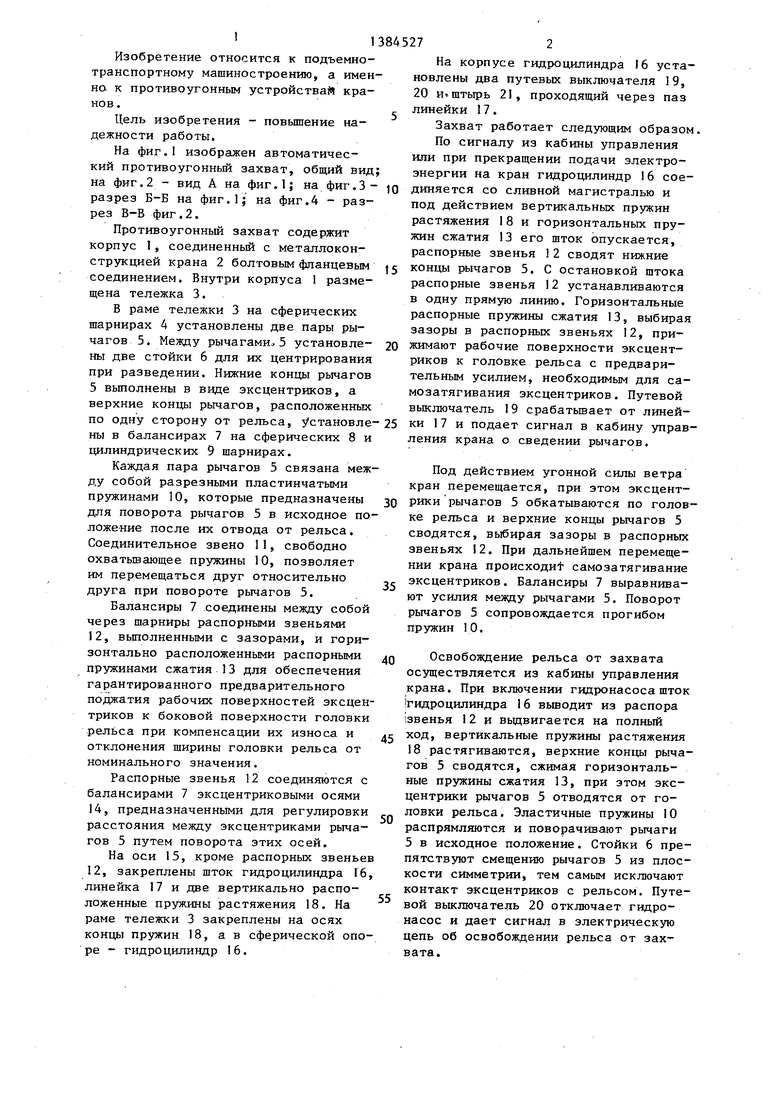
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 2000 |
|
RU2225828C2 |
| Автоматический противоугонный рельсовый захват | 1975 |
|
SU553192A1 |
| Противоугонный рельсовый захват крана | 1981 |
|
SU984979A1 |
| Противоугонный рельсовый захват крана | 1990 |
|
SU1773850A1 |
| Противоугонный захват для грузоподъемных кранов | 1972 |
|
SU462794A1 |
| Противоугонное устройство дляКРАНА | 1979 |
|
SU839996A1 |
| Противоугонный захват для грузоподъемных кранов | 1972 |
|
SU440325A1 |
| УСТРОЙСТВО для КРЕПЛЕНИЯ ПРОТИВОУГОННЫХ ЗАХВАТОВ НА ГРУЗОПОДЪЕМНЫХ КРАНАХ | 1971 |
|
SU320443A1 |
| Противоугонный захват для кранов | 1981 |
|
SU977363A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ РАЗБОРКИ ЗВЕНЬЕВ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1997 |
|
RU2116398C1 |


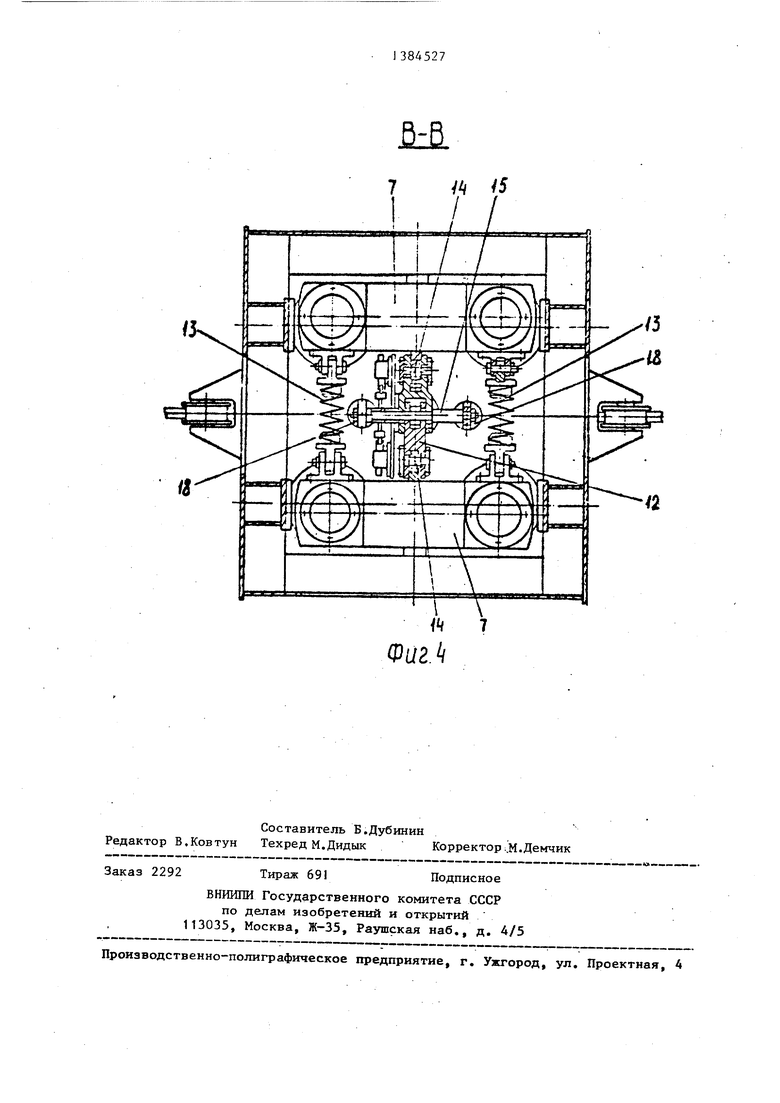
Изобретение относится к подъемно-транспортному машиностроению.Цель изобретения - повышение надежности работы. Противоугонный захват содержит тележку 3, на которой посредством шарниров 4 смонтированы две пары рычагов 5. Верхние концы рычагов 5 попарно связаны балансирами 7, обеспечивающими выравнивание усилия под- жатия рычагов 5 к головке рельса. 1 3. п. ф-л ы, 4 ил.
: эо
4
1384527
относится к подъемноно20 ли
транспортному машиностроению, а именно к противоугонным устройствам кранов.
Цель изобретения - повьшзение надежности работы.
На фиг.I изображен автоматический противоугонный захват, общий вид на фиг. 2 - вид А на фиг.1; на фиг. 3- разрез Б-Б на фиг.1; на фиг.4 - разрез В-В фиг.2.
Противоугонный захват содержит корпус 1, соединенный с металлоконструкцией крана 2 болтовым фланцевым соединением. Внутри корпуса 1 размещена тележка 3.
В раме тележки 3 на сферических шарнирах 4 установлены две пары рычагов 5. Между рычагами 5 установлены две стойки 6 для их центрирования при разведении. Нижние концы рычагов 5 вьтолнены в виде эксцентриков, а верхние концы рычагов, расположенных
по одну сторону от рельса, Установле-25 ки 17 и подает сигнал в кабину управ- ны в балансирах 7 на сферических 8 и цилиндрических 9 шарнирах.
Каждая пара рычагов 5 связана между собой разрезными пластинчатыми пружинами 10, которые предназначены зо для поворота рычагов 5 в исходное положение после их отвода от рельса. Соединительное звено 11, свободно охватьшающее пружины 10, позволяет им перемещаться друг относительно друга при повороте рычагов 5.
Балансиры 7 соединены между собой через шарниры распорными звеньями
35
ления крана о сведении рычагов.
Под действием угонной силы ветра кран перемещается, при этом эксцентрики рычагов 5 обкатываются по головке рельса и верхние концы рычагов 5 сводятся, выбирая зазоры в распорных звеньях 12. При дальнейшем перемещении крана пpoиcxoдиt самозатягивание эксцентриков. Балансиры 7 выравнивают усилия между рычагами 5. Поворот рычагов 5 сопровождается прогибом пружин 10.
12, выполненными с зазорами, и горизонтально расположенными распорными пружинами сжатия 13 для обеспечения гарантированного предварительного поджатия рабочих поверхностей эксцентриков к боковой поверхности головки рельса при компенсации их износа и отклонения ширины головки рельса от номинального значения.
Распорные звенья 12 соединяются с балансирами 7 эксцентриковыми осями 14, предназначенными для регулировки расстояния между эксцентриками рычагов 5 путем поворота этих осей.
На оси 15, кроме распорных звеньев 12, закреплены шток гидроцилиндра 16, линейка 17 и две вертикально расположенные пружины растяжения 18. На раме тележки 3 закреплены на осях концы пружин 18, а в сферической опоре - гидроцилиндр 16.
На корпусе гидроцилиндра 16 установлены два путевых выключателя 19, 20 и.штырь 21, проходящий через паз линейки 17.
Захват работает след тощим образом. По сигналу из кабины управления или при прекращении подачи электроэнергии на кран гидроцилиндр 16 соединяется со сливной магистралью и под действием вертикальньк пружин растяжения 18 и горизонтальных пружин сжатия 13 его шток опускается, распорные звенья 12 сводят нижние
концы рычагов 5. С остановкой штока распорные звенья 12 устанавливаются в одну прямую линию. Горизонтальные распорные пружины сжатия 13, выбирая зазоры в распорных звеньях 12, прижимают рабочие поверхности эксцентриков к головке рельса с предварительным усилием, необходимым для самозатягивания эксцентриков. Путевой выключатель 19 срабатьшает от линейки 17 и подает сигнал в кабину управ-
ления крана о сведении рычагов.
Под действием угонной силы ветра кран перемещается, при этом эксцентрики рычагов 5 обкатываются по головке рельса и верхние концы рычагов 5 сводятся, выбирая зазоры в распорных звеньях 12. При дальнейшем перемещении крана пpoиcxoдиt самозатягивание эксцентриков. Балансиры 7 выравнивают усилия между рычагами 5. Поворот рычагов 5 сопровождается прогибом пружин 10.
Освобождение рельса от захвата осуществляется из кабины управления крана. При включении гидронасоса шток гидроцилиндра 16 вьюодит из распора звенья I2 и вьздвигается на полный ход, вертикальные пружины растяжения 18 растягиваются, верхние концы рычагов 5 сводятся, сжимая горизонтальные пружины сжатия 13, при этом эксцентрики рычагов 5 отводятся от головки рельса. Эластичные пружины IО распрямляются и поворачивают рычаги 5 в исходное положение. Стойки 6 препятствуют смещению рычагов 5 из плоскости симметрии, тем самым исключают контакт эксцентриков с рельсом. Путевой выключатель 20 отключает гидронасос и дает сигнал в электрическую цепь об освобождении рельса от захвата.
Формула изобретения
Автоматический противоугонньш рельсовый захват, содержащий тележку, шарнирно закрепленные на ней двуплечие рычаги с эксцентриками, механизм фиксации положения рычагов и распор- Hbie «венья, отличающийся тем, что, с целью повышения надежности работы, он снабжен дополнительной парой рычагов и балансирами, выполненными в виде балок, при этом верхний конец одного и другого рычагов каждой пары, расположенной по одну
сторону тележки, закреплен на балке соответствующего балансира вом соответственно сферического и цилиндрического подшипников, распорные звенья размещены между балками балансиров с возможностью в.загтодей- ствия с ними, а механизм фиксации положения рычагов выполнен в виде пластинчатых пружин, попарно связанных между собой одними концами и закрепленных жестко другими концами на верхних плечах расположенной по одну сторону тележки пары рычагов.
ВидА
11
10
Фи2.2
-ЧЧ у ч 4J у 4 4г
у X ,. X Ъ . - /JI.Z.JZJfc..fon«i. л X ii
ФигЗ
Б-Б
. .iN Л -Л I л 1 vTiSrVrS дГлК
/ у 7 у /ГУ X X j X V У у у /17
I
2/
в-в
Фиг. ;
| Автоматический противоугонный рельсовый захват | 1975 |
|
SU553192A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
