Изобретение относится к системам управления рабочим оборудованием нод ье.мно- траиспортных средств и может быть использовано 1ьн погрузчиках, предназначенных для перегрузки труб на строительстве магистральных трубопроводов.
Цель изобретения - повыше 1ие производительности погрузчика путем автоматизации управления рабочими процессами.
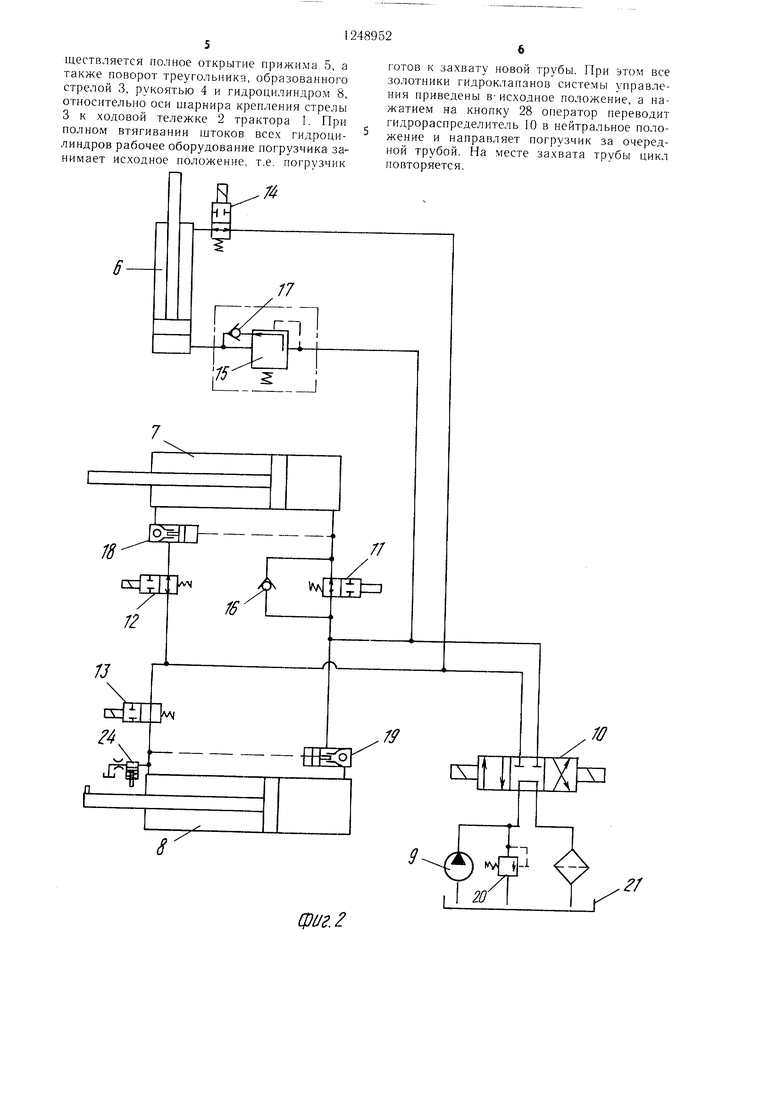
На фиг. 1 схематично изображено рабочее оборудование погрузчика, общий вид; на фиг. 2 - принципиальная гидравлическая схема привода и управления рабочим оборудованием погрузчика; на фиг. 3 - блок- схема устройства управления тем же оборудованием; на фиг. 4 - этапы работ1з1 оборудования.
Базовая машина погрузчика, например трактор I, содержит ходовую тележку 2, к которой сбоку шарнирно прикреплено грузозахватное устройство, выполненное в виде шарнирного многозвенника и включающее боковую стрелу 3 с шарнирно закрепленной на ней рукоятью 4. На верхней части рукояти 4 закреплен поворотный прижим 5, который соединен со средней частью рукояти 4 гидроцилиндром 6 прижима. Средняя часть рукояти 4 соединена также посредством гидроцилиндра 7 стре.чы с порталом трактора I, а нижняя часть - гидроцилин,аром 8 рукояти с рамой ходовой тележки 2. При этом гидроцилиндр 7 стрелы расположен выше, а гидроцилиндр 8 рукояти - ниже стрелы 3. Гидравлическая схе.ма рабочего оборудования погрузчика содержит насос 9, гидрорасиределитель 10 с электроуправлением его золотника, управляе.мые электрогид- роклапаны системы управления, напорный гидроклапан 15, обратные клапаны 16 и 17, гидроза.мки 18 и 19 и предохра- нителвный клапан 20. Слив рабочей жидкости осуществляется в бак 21. На рукояти 4, в ее средней части, установлен датчик 22 захвата, прижи.м 5 снабжен датчиком 23 контакта, установленным на его внутренней стороне в его периферийной части. Гидроци- лиидр 8 оборудован датчиком 24 перемещения, фиксирующим полное втягивание штока этого гидроцилиндра при наличии максимального давления в щтоковой полости. Нижний конец рукояти 4 снабжен датчиком 25 выгрузки. Управление работой погрузчика осуществляется из кабины трактора 1 с пульта управления (не показан), на котором расположены кнопка 26 «Подъем, кнопка 27 «Опускание и кнопка 28 «Нейтраль.
Устройство управления рабочим оборудованием погрузчика работает следующим образом.
Погрузчик устанавливают параллельно трубе, подлежащей транспортировке и расположенной на стеллаже таким образом, чтобы боковая стрела 3 с рукоятью 4 расио- лага,чась примерно в средней части трубы. При этом штоки гидроцилиндров 6-8 втя
5
0
5
0
S
0
5
0
5
нуты, гидрораспределитель 10 находится в нейтральном положении. На пульте управления рабочим оборудованием погрузчика оператор нажимает кнопку 26 и тем самым посылает сигнал исполнительным органам. По этому сигналу золотник электро- гидрораспределителя 10 перемещается влево. При этом масло из насоса 9 через распределитель 10 и гидрозамок 19 поступает в бесщтоковую полость гидроцилиндра 8 и через открытый гидроклапан 11 - в бесщтоковую полость гидроцилиндра 7. Давление рабочей жидкости на поршни гидроци.тинд- ров 7 и 8 заставляет их перемещаться и штоки этих гидроцилиндров выдвигаются. При этом напорный гидроклапан 15, настроенный на максимальное давление в гидросистеме, препятствует подводу масла к бес- штоковой полости гидроцилиндра 6. Масло, вытесняемое из бесштоковых полостей гидроцилиндров 7 и 8 при их переме- ц.1ении через открытые гидроклапаны 12 и 13, гидрозамок 18 и гидрораспределитель 10, поступает в бак 21. При выдвижении штоков гидроцилиЕщров 7 и 8 рукоять 4 со- верщает поступательное перемещение в сторону трубы, подлежащей транспортировке, до ее контакта с трубой. При контакте рукояти 4 с трубой срабатывает датчик 22 захвата, котоый .может быть выполнен, например, в виде профилированного соответственно внутренней стороне рукояти подпружиненного упора, который воздействует на реле, подающее управляющий сигнал. При этом управляющий сигнал может быть как электрический, так и гидравлический, что относится ко всей системе управления приводом рабочего оборудования погрузчика. По сигналу датчика 22 захвата, поступающему на электрогидроклапан 1 1 системы управления, золотник которого перемещается влево и тем самым препятствует подводу масла в бесщтоковую полость гидроцилиндра 7. По этому же сигналу включается питание датчика 24 перемещения. При перекрытии слива из штоковой полости гидроцилиндра
7он останавливается, а HJTOK гидроцилиндра
8продолжает выдвигаться. При выдвижении штока гидроцилиндра 8 рукоять 4 поворачивается вокруг оси иJapниpнoгo крепления рукояти 4 к стреле 3 и труба оказывается захваченной нижней частью рукояти 4. Когда шток гидроцилиндра 8 полностью выдвигается и давление в систе.ме возрастает до максимальной величины, срабатывает напорный гидроклапан 15, который соединяет насос 9 через гидрораспределитель 10 с бесщтоковой полостью гидроцилиндра 6, а вытесняемое из щтоковой полости масло через клапан 14 и распределитель 10 поступает в бак 21. Выдвижение штока гидроцилиндра 6 осуществляется до тех пор, пока прижим 5, а следовательно, и установленный на нем датчик 23 контакта, взаимодействующего с реле, не со
прикоснется с трубой. При контакте упора датчика 23 контакта реле замыкается и посылает сигнал управления на распределитель 10 и клананы 13 и 14 системы управления. Датчик 23 контакта срабатывает после того, как транспортируемая труба за- ключается между рукоятью 4 и прижимом 5. По сигналу датчика 23 контакга золотник гидрораспределителя 10 перемешается вправо и происходит реверс потока рабочей жидкости, а золотники гидроклапанов 13 и 14 системы управления под действием унрав- ляюн1его сигнала перемещаются и перекрывают подвод рабочей жидкости к IHTOKO- вым полостям гидроцилипдров 6 и 8, Масло от насоса 9 через гидрораспределитель 10, клапан 12 и гидрозамок 18 посту- Пает в штоковую полость гидроцилиндра 7, П1ТОК последнего 5тягивается. Бесщтоковая полость гидропилиндра 7 через обратный клапан 16 и распределитель 10 соединяется с баком 21. При втягивании njTOKa гид- роцилиндра 7 жесткий треугольник, образованный стрелой 3, рукоятью 4 и гидро- пилиндром 8, поворачивается вокруг оси шарнира крепления стрелы 3 к ходовой те.южке 2 трактора 1, т.е. рабочее оборудование погрузчика с захваченной трубой переводится в транспортное положение. На этом рабочий процесс захвата трубы заканчивается, оператор па пульте управления нажимает кнопку 28, по сигналу которой распределитель 10 занимает нейтральное положение и в этом положении труба транспортируется к месту ее разгрузки.
На месте разгрузки трубы оператор нажимает кнонку 27 «Опускание. По этому сигналу золотник распределителя 10 переводится вправо и обесточивается питание клапана 13, золотник которого возвран1.ается под действием пружины в исходное положение, тем самым соединяя пп оковую полость гидропилиндра 8 с напорной магистралью через гидрораспределитель 10. Бес- П1токовая полость гидропилиндра 8 соединена через гидрозамок 19 и распределитель 10 с баком 21. При втягивании штока гид- ропилипдра 8 рукоять 4 соверн ает поворот относительно оси шарнира крепления рукояти 4 к стреле 3. Когда HITOK гидропилинд- ра 8 полностью втягивается, срабатывает датчик 24 перемеп1.ения, который посылает управляюпиш сигнал при условии, что IHTOK гидроцилиндра 8 полностью втянут, а давление масла в штоковой полости гидроцилиндра 8 достигает максимальной величины. Конструктивно датчик перемещения может быть выполнен в виде гидроцилиндра, нор- nienb которого со стороны его штоковой полости подпружинен, а поршневая полость соединена со Н1токовой полостью гидроци- линдра 8. На конце штока гидроцилиндра 8 установлен упор, который при втянутом положении HiTOKa гидроцилиндра 8 замыкает
0
5 5
о 5 5
0
5
0
pe. ie. расположенное iia штоке гидроцилиндра-датчика, и оно подает сигнал управления. По сигналу датчика 24 неремеще- ния золотник гидрораспределителя 10 перемещается влево, золотник к.тапана 13 системы управления перемепхается вправо и пере- к)ывает штоковую полость гндрош .линдра 8. По этому же сигналу гн1П1ается цитапие клапана 11, золотник которого под действием возвратной пружи; ы в;1,-;П|1я.шается в исходное ноложение- При этом мас.ю от насоса 9 через гндрораспреде.чите. И) 10 и K. ia- пан 11 поступает в бесп1токовую полость гидроцилиндра 7 и шток его начинает выдвигаться, а вытесняемое масло из 1нтоковой полости через гидрозамок 18, клапан 12 и сливную магистраль гидрораспределителя 10 поступает в бак 21. При выдвижении ujTOKa гидроцилиндра 7 треугольник, обрг .зованный стрелой 3, рукоятью 4 и гидр.оци.пиндром 8, поворачивается относите, ibiio оси шарпира соединения стрс. 1ы 3 с ходове)й тележкой 2 трактора 1. Шток гидроцилин.1.ра 7 В1з1двп- гается до тех нор, пока нижшпн конец руко- ятн 4 не приходит в соприкосновение с грунтом. При этом контакте срабатывает датчик 25 выгрузки, который установлен на нижнем конце рукояти 4 и посылает сигнал управления на гидрораспределитель 10 и клапаны 12 и 14 системы унравления. По этому сигналу датчика 25 выгрузки золотник распределптеля неременшется вправо и золотник кланана 12 перемещается вправо и изолирует И1токовую по,1ость гидроцилинд- ра 7 от напорной магистра.ш. а золотник клапана 14 возвращается в исходное положение. .Иасло из насоса 9 через гидрораспределитель 10 и клапан 14 системы управления поступает в штоковую полость гидроцилиндра 6 и выходит из 6ceiHTOKOBoii полости через обратный клапан 17 и рас- нределитель 10 в бак 21. Шток ги. цюци- линдра 6, втягиваясь, поворачивас прижим 5 вокруг оси его Н1арнирного крепления к рукояти 4 и освобождает трубу, которая скатывается по внутренней поверхности рукояти 4 на землю. Скатываясь, труба освобождает подпружиненный упор датчика 22 захвата и тем самым нерек.чючает реле, которое подает в цепь сиг на.ч управления iia датчик 24 перемен.ения и к.чапа- пы 12 и 13 системы управления. По этому сигналу блокируется цепь управ.пения датчика 24 перемещения, а зол(Угиик11 к.1анано15 12 и 13 возвращаются в исходное ноложение под действием пружины возврата. .Масло от насоса 9 через распреде. ште.чь 10, клапаны 12-14 и гидрозамок 18 пост пает в гптоковые полости гидроц|1,1индров 6--8. Штоки гидроцилиндров 6 и 7 втягиваются. Рабочая жидкость из бесн1токовых полостей этих гидроцилиндров вытесняется в бак 21 через клапан 11 и обратный клапан 17. При втягивании HITOKOB гидрон.илиндр(,)в i.i и 7 (цггок гидроци. пшдра 8 втянут ранее) осуществляется полное открытие прижима 5, а также поЕюрот треугольника, образованного стрелой 3, рукоятью 4 и гидроцилиндро.м 8, относительно оси шарнира крепления стрелы 3 к ходовой тележке 2 трактора I. При полном втягивании штоков всех гидроцилиндров рабочее оборудование погрузчика занимает исходное положение, т.е. погрузчик
готов к захвату новой трубы. При этом все золотники гидроклапанов системы управления приведены в-исходное положение, а нажатием на кнопку 28 оператор переводит гидрораспределитель 10 в нейтральное положение и направляет погрузчик за очередной трубой. На месте захвата трубы цикл повторяется.
/

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод рабочего оборудования погрузчика | 1986 |
|
SU1516582A1 |
| Гидропривод фронтального погрузчика | 1985 |
|
SU1323674A1 |
| ГИДРОПРИВОД ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1991 |
|
RU2017903C1 |
| Гидропривод погрузчика | 1986 |
|
SU1460147A1 |
| Гидропривод одноковшового фронтального погрузчика | 1985 |
|
SU1331969A1 |
| Гидропривод стрелы погрузчика | 1985 |
|
SU1326542A1 |
| Гидропривод одноковшового фронтального погрузчика | 1986 |
|
SU1388523A1 |
| Гидравлическая система к погрузчикуКОРНЕплОдОВ | 1979 |
|
SU803890A1 |
| ГИДРОПРИВОД НАВЕСНОГО МАНИПУЛЯТОРА | 1999 |
|
RU2158707C1 |
| Гидропривод стрелы погрузчика | 1985 |
|
SU1242592A1 |


18
S
с41Е
л.
12
к
/у
фиг. 2
Составитель П. Григорченко
Редактор Е. ПаппТехред И. ВересКорректор И. Муска
Заказ 4188/21Тираж 799Подписное
ВНИИПИ Государствеиного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
.чХЧЧЧЧЧЧЧЧ - ч
фиг А
| Устройсто управления рабочим оборудованием погрузчика | 1974 |
|
SU548560A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
