Изобретение относится к электротехнике, а именно к устройствам для управления двигателями постоянного тока, и может быть исцользовано для управления двигателем электроприводов грузоподъемных механизмов, например механизма подъема крана.
Цель изобретения - повьшение надежности электропривода.
На фиг, 1.. представлена схема электропривода постоянного тока; на фиг. 2 - электромеханические характеристики электропривода.
Предлагаемый электропривод с о- держит -(фиг. 1) двигатель 1, подключенный к реверсивному преобразователю 2 с блоком 3 управления, вход которого подключен к блоку 4 задани соединенному с одними входами блока И 5 и блока ИЛИ 6, блок ИЛИ 7, блоки И 8 и 9, обмотку 10 возбуждения двигателя 1, подключенную к возбудителю 11 с блоком 12 управления, пороговые элементы 13 и 14, инверсн выход порогового элемента 13 через блок ИЛИ 6 соединен с входом блока И 8, выход порогового элемента 14 соединен с входом блока 12 управления возбудителя.11, датчиком тока 1 яко ря двигателя 1, и 18 задержки, два
16 17
и напряжения два элемента диода 19 и 20-и пороговый элемент 2
Инверсный выход датчика 16 напряжения через элемент 17 задержки и диод 19 соединен с входами пороговых элементов 13 и 21, соединенными также через диод 20 с датчиков 15 тока. Выход порогового элемента 21 соединен с вторым входом блока И 8. Выход блока ИЛИ 7 через блок И 5, элемент 18 задержки, блок И 9 соединен с входом порогового элемента 14 Второй вход блока И 9 соединен с выходом датчика 16 напряжения, а второй выход элемента 18 задержки соединен с вторым входом блока ИЛИ 7.
В качестве датчика 16 напряжения может быть использовано электромагнитное реле напряжения, катушка 22 КОТОРОГО через резистор 23, шунтированный размыкающим контактом 24 реле, включена на зажимы .якоря двигателя 1. В качестве датчика 15 тока якоря двигателя 1 может быть использовано устройство, состоящее из трех трансформаторов 25 тока, трехфазного выпрямителя 26 и резистора 27,
2496822
Преобразователь 2 выполнен реверсивным, .а возбудитель 11 является нереверсивным преобразователем. Блок 3 может быть выполнен с задатчиком
5 интенсивности, который при скачкооб- разном изменении сигнала на его входе плавно изменяет сигнал на своем выходе.
На фиг. 2 представлены электроме10 ханические характеристики электропривода механизма подъема: характеристики 28 привода в режиме Подъем при полном поле двигателя в зависимости от положения блока 4 задания,
15 характеристика 29 привода в режиме- Подъем при -ослабленном поле двигателя в крайнем подожении блока 4 задания, характеристики 30 привода в режиме Спуск при полном поле двига20 теля в зависимости от положения блока 4 задания, характеристика 31 привода в режиме Спуск при ослабленном поле двигателя в крайнем положении блока 4 задания, нефиксированная
25 характеристика 32 привода, до которой затормаживается двигатель при торможении снижением напряжения на якоре
0
0
0
двигателя за время, пока поле двигателя остается ослабленным, характеристика 33 ограничения напряжения тирис- торноГо преобразователя по инвертор- ному режиму. Кроме того, обозначены ток 1 в цепи якоря двигателя при спуске без груза в режиме ослабленно-: го поля, ток цепи.якоря двига - теля при спуске груза и при полном поле двигателя, ток I в цепи якоря двигателя при подъеме без груза в режиме ослабленного поля, ток I в . цепи якоря двигателя при спуске груза в режиме полного поля двигателя.
Из характеристик очевидно, что ток двигателя при подъеме без груза -С ослабленным полем 1 и ток двигателя при спуске груза I с полньм полем соизмеримы. При торможений из т. А без задержки сигнала на усиление поля за счет броска тока имеет место опрокидывание преобразователя - т. С, находящаяся за пределами характеристики ограничения по инверсному режиму.
При задержке подачи сигнала на усиление Поля при торможении сначала за счет снижения напряжения рабочая точка перемещается из т. Авт. В на характеристике 34. Бросок тока при .торможении усилением поля из
т. В при пониженном напряжении к опрокидыванию инвертора не приводит (характеристика 35).
Устройство работает следующим образом.
При подаче сигнала управления с выходов блока 4 задания сигнала заданного направления и заданной величины поступает на вход блока 3 уп- равления и на вход блока И 5, в случае работы в направлении подъема - на вход блока ИЛИ- 6, Датчик 16 напря жения настраивается на срабатывание при напряжении, равном по величине номинальному напряжению двигателя 1. Пока это напряжение меньше, на инверсном выходе датчика 16 напряжения логический сигнал равен единице, и через элемент 17 задержки и диод 19 он поступает на входы пороговых элементов 13 и 21, при этом сигнал на инверсных выходах пороговых элементов 13 и 21 равен логическому нулю. Следовательно, на выходе блока И 8 сигнал также равен логическому нулю. Через блоки 7, 5, 19, 9 и 14 сигнал логического нуля передается на вход блока 12 управления ослаблением поля. На выходе возбудителя 11 пблное напряжение, т.е. нo шнaльный ток возбуждения и, следовательно, номинальный магнитный поток двигателя 1. Сигналы с выходов датчиков 15 и 16 сравниваются на входе пороговых элементов 13 и 21. Пока напряжение на якоре двигателя 1 не достигло величины уставки датчика 16 ; напряжения, сигнал с выхода датчика 15, тока не влияет на работу схемы. Когда напряжение якоря двигатели 1 достигает величины уставки, сигнал н инверсном выходе датчика 16 напряжения становится равным логическому нулю. На входах пороговых элементов .13 и 21 нуль сигнала от датчика 16 напряжения появляется через время задержки элемента 17 задержки. За время задержки ток в якоре двигателя 1 снижается до статического значения и с выхода датчика 15 тока через ди- од 20 на входы пороговых элементов 13 и 21 подается сигнал, пропорцио-. нальный величине тока якоря двигателя 1 . .
В зависимости от величины этого сигнала возможны три варианта работы привода:
при подъеме и спуске груза пороговые элементы 13 и 21- остаются вклю- ченными, и сигнал на их инверсных выходах равен логическому нулю, и далее схема работает так, как описано вьше;
при подъеме порожнего грузозахватного устройства сигнал на входе порогового элемента 21 недостаточен по величине и сигнал на его инверсном выходе становится равным логической единице; состояние порогового элемента.13 остается прежним, т.е. сигнал на его инверсном выходе остается равным логическому нулю, так как пороговые элементы 13 и 21 имеют разный порог срабатывания;
при спуске порожнего грузозахватного устройства сигнал на входах пороговых элементов 13 и 21 недостаточен для удержания их во включенном состоянии, следовательно, на инверсных выходах пороговых элементов 13 и 21 появляется сигнал, равньй логической единице.
В режиме подъема порожнего грузо- захвата .пороговый элемент 21 выключается, и на его инверсном выходе имеет место сигнал логической единицы, пороговый элемент 13 остается включенным. Этот сигнал поступает на вход блока И 8. На первый вход блока ИЛИ 6 сигнал логической единицы поступает от блока 4 задания. Следовательно, поступают сигналы логической единицы на оба входа блока И 8. Далее через блоки 7, 5, 18 9;и 14 этот сигнал поступает на вход блока 12, подается команда на снижение напряжения на выходе возбудителя 11, т.е. на ослабление поля двигателя 1 и увеличение его частоты вращения. В дальнейшем увеличение тока в цепи якоря за счет ослабления поля и увеличение сигнала на входах пороговых элементов 13 и 21, которое приводит к-повторному ложному включению порогового эл. мента 21,. не влекут за собой снятие сигнала на ослабление поля, так как введена обратная связь с второго выхода элемента 18 задержки на второй вход блока ИЛИ 7. При этом при появлении сигнала О на выходе блока И 8 сигнал на выходе элемента 18 задержки равен.логической едини- це, так как на втором входе блока ИЛИ 7 обратной связью поддерживается сигнал логической едини10 1, и поэтому
5124
система остается в прежнем устойчивом состоянии, несмотря на увеличение тока в якоре двигателя 1 из-за ослабления его поля
Таким образом, наличие пороговьк элементов 13 и 21 с блоком ИЛИ 6 позволяет различить токи двигателя 1 в зависимости от избранного направления - подъема или спуска (направление тока при этом не меняется) Элемент 17 задержки обеспечивает прохождение сигнала от датчика 15 тока на входы пороговых элементов 13 и 21 только после завершения переходного процесса, когда величина тока якоря двигателя 1 достига ет статического значения. Элемент 18 задержки с охватывающей обратной связью устраняет колебательные процессы после ослабления магнитного потока и усиления тока якоря двигателя. Кроме того, элемент 18 задержки обеспечивает надежную работу привода в тормозном режиме после спуска при ослабленном поле, устраняя опас- ность опрокидывания реверсивного преобразователя 2 в инверторном режиме. После снятия управляющих сигналов с блока 4 реверсивный преобразователь через блок 3 получа.ет ко- манду на снижение напряжения. Команды же на усиление магнитного потока не поступаютf так как через блок И 9, пороговый элемент 14 и блок. 12 от датчика 16 напряжения проходит сигнал ослабления поля до тех пор, пока напряжение на якоре двигателя 1 не снизится до заданного значения. Второй сигнал на вход блока И 9 с вьЬсода элемента 18 задержки поступа- ет благодаря наличию временной задержки. Благодаря этому сигнал на усиление поля двигателя 1 подается при пониженном напряжении на якоре двигателя. Последнее обстоятельст- во особенно важно при работе реверсивного преобразователя 2 в инверторном режиме, так как бросок тока в цепи якоря при торможении имеет место при пониженном напряжении, что улучшает коммутацию двигателя, кроме того, устраняется опасность опрокидьюания реверсивного преобразователя 2 в инверторном режиме.
s 0 5 0 5 0 5 0
5
Таким образом, в электроприводе постоянного тока обеспечивается повышение надежности работы в режиме ослабленного поля за счет наличия независимых уставок по току в I и IV квадрантах, что особенно важно в механизмах подъема крана с соотношени- ем масс порожнего и нагруженного грузозахвата, например, 1:3, за счет взвешивания.груза только в установившемся режиме, исключения автоколебаний при ослабленном поле двигателя и за счет ограничения выброса тока якоря при усилении, поля двигателя.
Формула из об р.е тения
Электропривод постоянного тока, содержащий двигатель, подключенный к реверсивному преобразователю с блоком управления, вход которого ПОДКЛЮ-.
чен к блоку задания, соединенному с одними входами первых блока И и блока ИЛИ, второй блок ИЛИ, второй и третий блоки И, обмотку возбуждения двигателя, подключенную к возбудителю с I блоком управления, первый и второй пороговые элементы, инверсньй выход первого порогового элемента через первьй блок Ш1И соединен с входом второго блока И, выход второго порогового элемента соединен с входом блока управления возбудителя, датчики тока и напряжения якоря двигателя, о т л и ч а ю щ и и с я. тем, что, с целью повышения надежности, в него введены два элемента задержки, два диода и третий пороговый элемент, при этом инверсный выход датчика напряжения через первый элемент задержки и первый диод соединен с входами первого и третьего пороговых элемен- тов, соединенными также через второй диод с датчиком тока, выход третьего порогового элемента соединен с вторым входом второго блока И, выход второго элемента ШШ через первый блок И, второй элемент задержки, третий блок И соединен с входом второго порогового элемента, второй вход третьего . блока И соединен с выходом датчика.,, напряжения, а второй выход второго элемента задержки соединен с вторым входом второго элемента ИЛИ.
Редактор А.Шишкина
.Составитель Ю.Воробьев Техред Л.Олейник Корректор С.Черни
Заказ 4338/58Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул Проектная, 4
фиг. г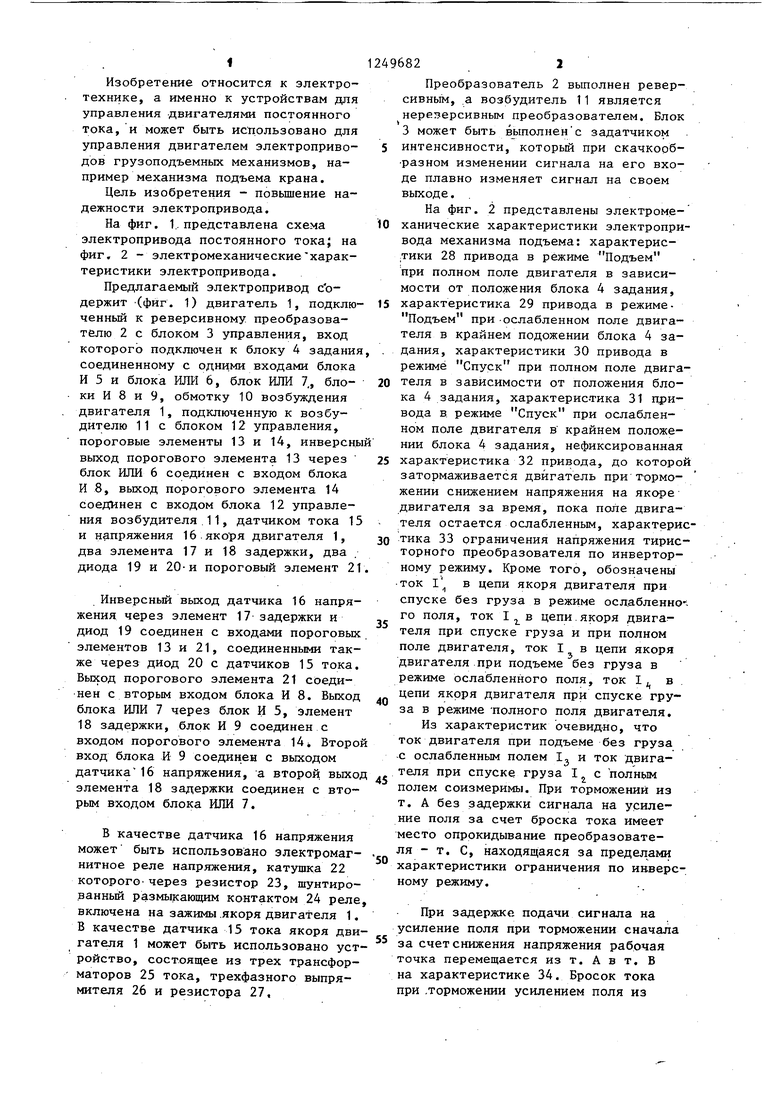
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1987 |
|
SU1436257A1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1988 |
|
SU1651350A1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1986 |
|
SU1403313A1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1987 |
|
SU1545316A1 |
| Устройство для перемещения электрода электротермической установки | 1982 |
|
SU1081815A1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| Электропривод постоянного тока | 1981 |
|
SU1022273A1 |
| Устройство для защиты электропривода постоянного тока | 1983 |
|
SU1246316A1 |
| Электропривод постоянного тока | 1978 |
|
SU748756A2 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
Изо.бретение относится к электротехнике и может быть использов&но для управления двигателем электроприводов грузоподъемных механизмов. Повьшение надежности электропривода обеспечивается введением двух элементов 17 и 18 задержки, двух диодов 19 и 20 и порогового элемента 21, Инверсный выход датчика 16 напряжения через элемент задержки 17 и диод 19 соединен с входами .пороговых элементов. 13 И.21, соединенными также через диод 20 с датчиком 15 тока. Выход порогового элемента 21 соединен с вторым входом блока И 8. В результате обеспечиваются исключение автоколебаний при ослабленном поле двигателя и ограничение перерегулиг рования тока якоря при усилении поля двигателя. 2 ил. .25 сл №N9 (риг. /
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| А.А.Рабиновича.- М.: Энергия, 1979,, с | |||
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
| А.П.Богословский и др | |||
| Системы тиристорного управления судовыми электромеханизмами | |||
| Л.: Судостроение, 1978, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
