И:(()Г)р(геиие относи ггя к , i( :uiO;i())()/ noil автоматике, а именно к yci (юйствам передачи И11(())рмации г транепоргно: ( сред- егва лдя ко1гг|)().:|я и )аи;|ения работой железнодорожного тра нснпрта.
Цель и «)Г)Н тения ноньиненис надежности.
На фиг, 1 1и)ка:к1на конет |)уктииная схема нредла аемого хстройстиа; на ()inr, 2 его ()и нкциона;|ьная схема.
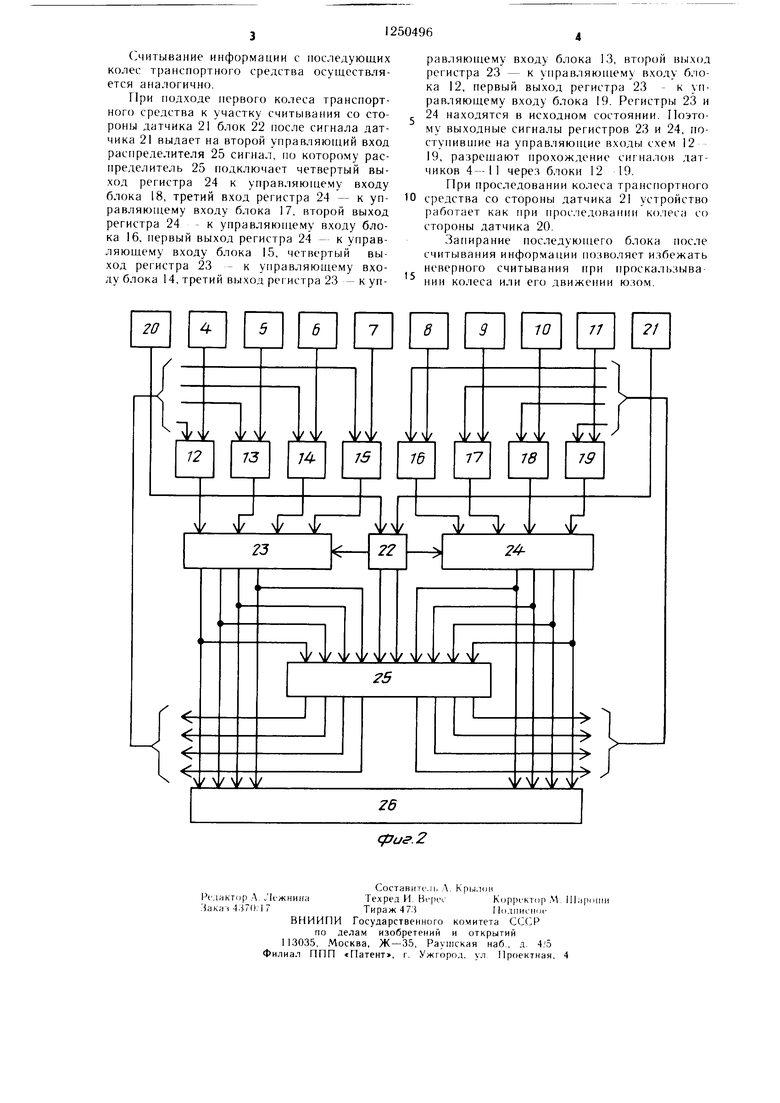
N cr()oiicTHo содержи же.печнодорожное колесо I, на котором нанееены магнитные ме1ки 2. iiepcMcHUiKuueecH но новерхности голонки 3, на боковой HOIU-JIXHOCTH когорого ycianoB. ieHbi датчики 4 7 Hepiioii и датчики S 1 1 вто)ой К()1ггрольн1,1 .и)Н с выходами соотвегственно соединенными с И1п(1 рманионными входами б/юков 12 I (aiiptM a первой и блоков И И) (анре-ia 1Г1О})ой контро.и.ных чон.
20 и 21 обна1)ужения колеса иодключены coo i BeicriieHHo к пе|)вому и вт()рг)му входам б. юка 22 унрав.и ния чани- си информации, нервый и второй выходы Koi opoi I) coo гветстиенно нодк.иочены к ЛЯ101НИМ входам ре1ис1ров 23 и 24, а третий и четвертый В1 1ходв1к нервому и вгорому унравлякицим входам ра нредели- теля 2f) Выход1,1 нмшл ров 2. и 24 нодключе- Н1.1 соогветсгвеино к входам блока 2t) об- )або1ки ии(()()|)маиии и к ин(})орманнонным входам раснределите.тя 2Г), а выходы но- с,теднего соогветст НЧ1но к унрав.1як;п1им входам б, 1оков 12 15 HepBoii и блоков Ui И второй конт ро.тьны.х чон.
Усгроис во рабо ai. i с.чедующим обрачом иод.ходе нерво1ч) ко.чеса гранснорт- HOI о ср чсгва к учас1ку считывания, на- иричн р, со стороны датчика 20 обнаружения колееа, б.. 1ок 22 ун(1ав, 1ения но си|-- налу датчика 20 выдас на не|твый ун)ав- ,1Я1они111 вход р 1снределителя 25 сигнал, но которому раснреде. ш ге,.|ь 25 нодк.чючает iiefi Bi.iii выход perHci pa 23 к нравлям)1Ц1. м ВХОД} б.юка { . i uiiipe ia, BTo|)oii выход iTici pa 23 к у н)авля101нсму входу б.тока . 1(е1И11 выход penicipa 23 к уиравля- loHU My lixo.r . б,1ока 15, чегверТ1)1Й выхо;; )егис1 ра 23 к у11рав,тяк)Н1ем входу б.то- ка И), нерв1)1Й выход регистра 24 к ун- рав,тяк)ни му входу б,мока 17, второй выход регисгра 24к у11рав.тян)И1ему входу
блока , трегий выход нмлн тра 24 - к уи- рав, 1як)Н1ему входу б.тока 19, четвертью вы о.т PC; негра 24к 11равляк)Н1ему вхо
.ly б, 1()ка 12. I ei Истры 2 и 24 находятся
I Ш ЧОДНОМ 1()СГ()ЯНИИ. IloilOMy ВЫХОДН1 1е
си1на,1,1 pciiicrpoB 2,3 и 24, нос-тунивнше на унравлякицие входы б.юков 12 19 чанрета, рачре1нан)т прохождение cm налов датчиков 4 1 1 чере: , блоки 12 19.
При наечде ко,теса I с метками 2 на датчики 4 II |)оисх(.)диг обиаружение MainHi- Hoii М1.ЧКИ. При чтом срабатывае один и.ч датчиков, нанример да1 чик 4. (ли на,) дагчи.S
ка 4, 11рон1ед|ний через блок 12 и .чапи- ,|й в нервый рачряд ре1иетра 23, одно- в|1еменно ностунает на у11рав,тяк)Н1ий вход б,|ока 13 и чанреникт цюхождение сигнала датчика 5 череч б,1ок 13, Погрому е,.1едук)- щим да1чиком, сигнал кото)ого н)()йдет череч б,1ок чанрета и чани1нетея в буферный нчистр 2,, будет датчик ti.
Таким обрачом, при движе)1ии колеса 1 с ма1Т1итными метками 2 но учаетку счит1)1- 0 вания со стороны датчика 20 cHi4ia,iii)i датчиков 4 7 чанисывак)гс-я соответственно в 1-й, 2-й, 3-й и 4 и рач 1яд1л буферного ре- I 23, сигналы датчиков 8 11со01 ветстЕ енно в 1-й, 2-й, 3-й и 4-й рачряды бу(ерного 1)егиет1)а 24. |||1ичем ча1Н1сь инфор- в оди) ич )ач(1ядов peincT)OB чанре- нтает аннс1) Н1н)ормании в нос,-|едук)Н1ИЙ |1ач)ЯД pel ис тра.
IloiMe прохождения Ko.iecovi участка счи- 1Т11вания в МОМ1ЧГТ на1 чда Ko,. ieca на чик 21 блок 22 выдает сигна,: сброса i)e- TucipaM 23 и 24 По : тому сигна,ту ин( мация, считанная датчиками 4 1 1 и чанисан- ная в cooTBei с твук)1ние рачряды региетров 23 и 2-1, выдается в блок 2ti обработки
C ин(|)орма11ии, носле региетры 23 и 24 вочврашаются в исходн 1е еостояние.
сли ра( етояние между соседними ко- ,Т1ч-ами транслюртного средства меньше длины окружности ко,меса, то при наечде вто,, |)01о Ko,ieca на датчик 20 б,ток 22 выдает (чипа,т сброса буферному peiHeipy 23. По 1Т()му еигналу информация, считанная датчиками 4 7 с не 1вого ко.теса и чанисан- ная в регистр 23, ввьтается в блок 26, а ре- гисгр 23 устанавливалчся в исходное состояние. lIjHi прохождении второго ко,те- са т ранснорттки о средства но участ ку считывания Hi pBoif контролвно чоны сишалы датчиков 4 7 чаиис1 1ван)тся в i-оотвегству- к)|цие )ач)яды регист)а 23. ()днов)еменно датчики X 1 1 второй контро,тьно11 чоны
считывают HHifioiiManHK) с нервогч) колеса I )анс||ортното средстти. (ди налы тих датчиков (анисываются в соответствуюнин 11ачряды регистра
П|)И наеч.че нервого
колеса на датчик 21 блок 22 выдает сигнал )са регистру 24. По этому сигналу информация, считанная с нервого ко.тееа и чаиисанная в регистр 24, В1 1дается в блок 21) а )егистр 24 вочвран|ается в ис.ходное состояние. нрохождении второго колеса транспортного средства но участку считываQ ния втор(й КО1Г1 р(),:1ЬН()й Ч() сигналы датчиков 8 1 I чанисываются в соответствующие рачряд|)1 регист1)а 24. При наечде вто- юго колеса на датчик 21 б,чок 22 выдает |Ц 1 унравляюшие входв )ei истров 23 и 24 сигнал сброса, но которому HHcjiojiMaHHH, счи5 тайная со BTojXjro колеса и чанисанная в регистры 24 и 25, (ыдаетея в блок 2В, а ре|И(.,| 2,3 и 24 во.чврашаются в исходное (Ч)стояние.
Ожтывание информации с последующих колес транспортного средства осуществляется аналогично.
При подходе первого колеса транспортного средства к участку считывания со стороны датчика 21 блок 22 после сигнала датчика 21 выдает на второй управляюпшй вход распределителя 25 сигнал, по которому распределитель 25 подключает четвертый выход регистра 24 к управляюп1ему входу блока 18, третий вход регистра 24 - к управляющему входу блока 17, второй выход регистра 24 - к управляюп1ему входу блока 16, первый выход регистра 24 - к управляющему входу блока 15, четвертый выход регистра 23 - к управляющему входу блока 14, третий выход регистра 23 - к уп
равляющему входу блока 13, второй выход регистра 23 - к управляюп1ему входу блока 12, первый выход регистра 23 - к управляющему входу блока 19. Регистры 23 и 24 находятся в исходном состоянии. Поэтому выходные сигналы регистров 23 и 24, поступившие на управляюп1ие входы схем 12 19, разрещают прохождение сигналов датчиков 4-11 через блоки 12 19.
При проследовании колеса транспортного средства со стороны датчика 21 устройство работает как при проследовании ко.чеса со стороны датчика 20.
Запирание последуюп1его блока после считывания информации позволяет избежать неверного считывания при проскальзыва НИИ колеса или его движении юзом.
Составите.1Ь .А. Крылон
Ре.чактор .А. .ЧежнинаТехред И. Вс)есKoppi KTop Л1, Ill ipniiin
.Зака И37();17Тираж 47.3Подписное
ВНИИПИ Государственного комитета CCCLP
по делам изобретений и открытий
113035, Москва, Ж--35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул Проектная, 4
(риг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров садки в методической кольцевой печи | 1985 |
|
SU1310604A1 |
| Устройство для сопряжения процессоров с внешними абонентами | 1978 |
|
SU750472A1 |
| Устройство для передачи информации с обратной связью | 1986 |
|
SU1322356A1 |
| Токарно-винторезный станок | 1987 |
|
SU1526954A1 |
| Устройство для обработки зубьев зубчатых колес | 1986 |
|
SU1399028A2 |
| Адаптивное устройство для сбора и обработки информации | 1976 |
|
SU595725A1 |
| Устройство для регистрации информации | 1985 |
|
SU1326887A1 |
| Многоканальный коммутатор | 1986 |
|
SU1401590A1 |
| Устройство для нанесения магнитных меток на колесо рельсового транспортного средства | 1987 |
|
SU1435500A1 |
| Устройство для контроля ударных нагрузок | 1986 |
|
SU1337702A1 |

| Устройство для считывания информации с колеса транспортного средства | 1977 |
|
SU745754A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
