1
Изобретение относится к робсто- технике и может быть использовано при создании роботов технологических конвейеров.
Цель изобретения - упрощение устройства .
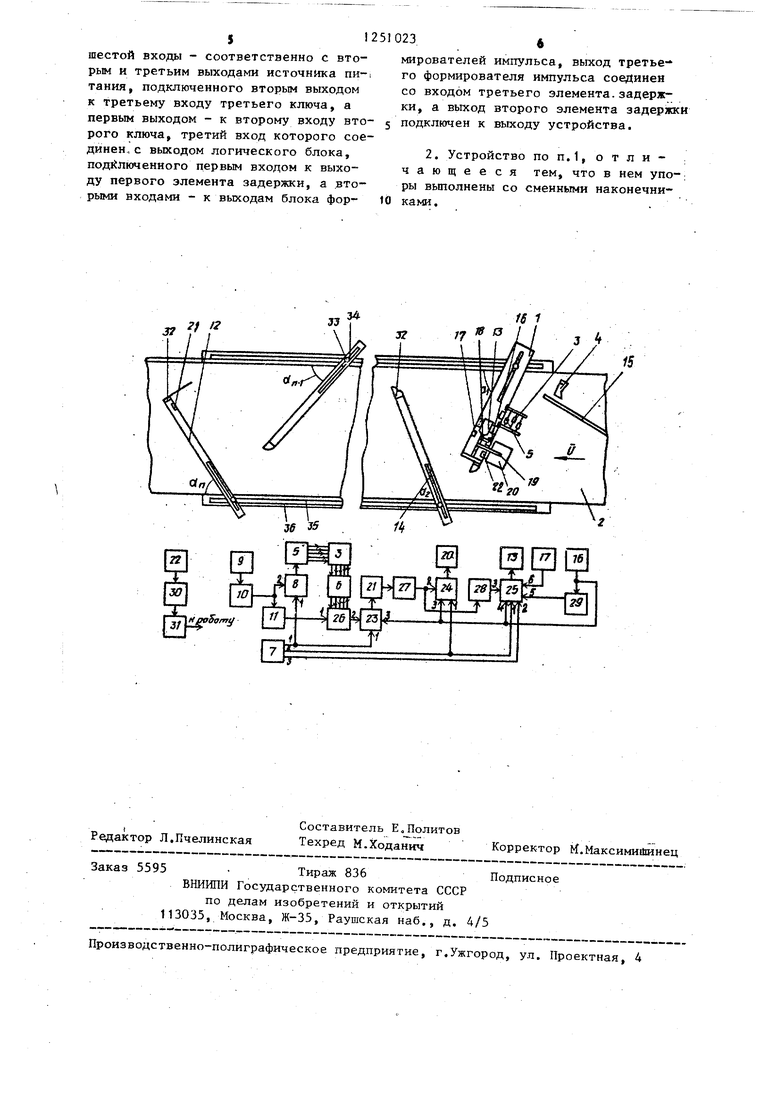
На чертеже представлена функциональная схема устройства.
Устройство содержит первый упор 1 конвейер 2, блок 3 фотодатчиков, ориентируемую деталь 4, блок 5 осветителей, блок 6 формирователей импульса, источник 7 питания, первый .ключ 8, первый датчик 9 касания, первый формирователь 10 импульса, первый элемент 11 задержки, вторые упоры 12, двигатель 13, пазы 14, направляющую 15, первый 16 и второй 17 датчики положения, переключающую пластину 18, кронштейн 19, электромагнит 20, второй 21 и третий 22 датчики касания, второй 23, третий 24 и четвертый 25 ключи, логический блок 26, второй формирователь 27 импульса, второй 28 и третий 29 элементы задержки, третий, формирователь 30 импульса, четвертый элемент задержки, сменные наконечники 32, гайки 33, шпильки 34, пазы 35, опоры 36 (oi,, ot ,. .., oi - углы наклона упоров 12).
Устройство работает следующим образом.
На этапе настройки и обучения выясняется, с каким типом деталей бу- цет работать устройство. Экспериментально выбирается число упоров 12, их местоположение на конвейере 2, углы наклона ot, , oi ,..., ot и форма их наконечников 32, необходимые для того, чтобы на последнем упоре 12 все устойчивые положения без переворота сводились к одному. Выбирается число и место положения фотодатчиков необходимых для распознавания устойчивых положений детали 4 без поворота от устойчивых положений с переворотом.
В исходном состоянии вал двигателя 13 находится в положении, при котором переключающая пластина 18 касается датчика 16 положения. Ключи.8, 23-25 находятся в состоянии, при котором сигнал на их выходах отсутствует.
Деталь 4, перемещаемая лентой конвейера 2, смещается к краю ленты направляющей 15. Дойдя до упора 1,
, 1
, 10232
деталь 4 под действием сил трения начнет разворачиваться, одновременно с этим деталь 4 скользит -вдоль упора 1. При этом деталь 4 занимает
5 одно из возможных устойчивых положений, после чего продолжает скользить вдоль упора 1 в этом положении. При подходе детали 4 к датчику 9 касания последний срабатывает. Сигнал
О с датчика 9 касания подается на вход формирователя 10 импульсов. С выхода формирователя 10 импульсов сформированный сигнал поступает на второй вход ключа 8 и вход элемента 11
15 задержки. По этому сигналу ключ 8 на время длительности сформированного импульса подключает через свой Аервый вход первый выход источника 7 питания к блоку 5 осветителей.Блок 5
20 осветителей включается. Срабатывает блок 3 фотодатчиков. Сигналы с блока 3 фотодатчиков подаются на входы блока 6 формирователей импульсов, на выходе которого появляется сформиро25 ванный двоичный код, поступающий на входы логического блока 26, на первый вход которого подается сигнал с элемента 11 задержки. Величина держки элемента 11 задержки выбирается больше времени срабатывания блока 3 фотодатчиков и срабатывания блока 3 фотодатчиков и блока 5. При поступлении сигнала с элемента 11 задержки логический
35 блок 26.срабатывает. При этом сигнал на выходе логического блока 26 появляется только в том случае, если деталь 4 находится в устойчивом положении с переворотом. По этому
40 сигналу ключ 23 подключает выход
источника 7 питания к датчику 22 касания . При подходе детали к датчику 22 он срабатывает. Сигнал с датчи- 1ка 22 касания поступает на вход фор мирователя 30 импульсов, с выхода которого сформированный сигнал подается на второй вход ключа 24 и через элемент 29 задержки на третий вход ключа 25. По этому сигналу
50 ключ 23 подключает второй выход источника 7 питания к обмотке электромагнита 20. Проходя под электромагнитом 20, деталь 4 примагничивается к нему. Величина задержки элемента 29
5 выбирается большей времени примагни- чивания детали 4 к электромагниту 20. После этого ключ 25 по сигналу с элемента 29 задержки подключает второй /
30
выход источника 7 питания к входу двигателя 13. Вал двигателя 13 начинает вращаться в положительном направлении, и электромагнит 20, закрепленный на валу двигателя 13 кронштейном 19, переносит деталь 4 на другую сторону упора 1, переворачивая ее. При этом переключающая пластина 18 нажимает на датчик 17 по15
20
ложения. Сигнал с датчика 17 положения подается на элемент 31 задержки, вход ключа 25 и входы ключей 23 и 24. По этому сигналу ключ 23 отключает выход источника 7 питания от датчика 22 касания, ключ 24 - выход источника 7 питания от обмотки электромагнита 20, ключ 25 - выход источника 7 питания от двигателя 13. Деталь 4 перестает примагничиваться к электромагниту 20 и под действием сил тяжести и трения о движущуюся ленту конвейера 2 сползает с электромагнита 20, переходя в состояние без переворота. Величина времени задержки элемента 31 выбирается боль-25 шей времени сползания детали 4 с электромагнита 20. С выхода элемента 31 задержки сигнал подается на вход ключа 25. По этому сигналу ключ 25 подключает обратное напряжение, по- 30 даваемое с выхода источника 7 питания, к входу двигателя 13. Вал двигателя 13 начинает вращаться в отрицательном направлении, и электромагнит 20 возвращается в исходное положение. Переключающая пластина 18 нажимает на датчик 16 положения, сигнал с которого поступает на вход ключа 25. По этому сигналу ключ 25 отключает обратное напряжение от входа двигателя 13.
Если деталь 4 движется вдоль упора -1 в устойчивом положении без переворота, то на выходе логического блока 26 сигнал не появляется и деталь 4 просто проходит вдоль всего упора 1.
Таким образом, после прохождения упора 1 все детали 4 на послевает. Сигнал с датчика 21 касания подается на формирователь 27 импульсов и далее на элемент 28 задержки. Величина задержки элемента 28 выбирается такой, чтобы обеспечить остановку детали 4 на наконечнике 32 последнего упора 12, выполненном в виде стопора. После этого на выходе элемента 28 задерткки, являющемся выходом устройства, появляется сигнал, который используется как сигнал к выполнению цикла робота.
При переходе на работу с другим типом детали процедура настройки и обучения производится заново.
Формула изобретения
10
35
40
45
1. Устройство для управления роботом технологического конвейера, содержащее упор, примыкающий к ленте конвейера, последовательно соединенные первые датчик касания, первый формирователь импульса, первый ключ и блок осветителей, последовательно подключенные блок фотодатчиков и блок формирователей импульса, источник питания, соединенный первым выходом с вторым входом первого ключа, подключенного первым входом к входу первого элемента задержки, отличающееся тем, что, с целью упрощения устройства, оно содержит логический блок, первый датчик положения, последовательно соединенные второй датчик касания, второй формирователь импульса и второй элемент задержки, последовательно подключенные второй ключ, третий датчик Касания, третий формирователь импульса, третий ключ и электромагнит, последовательно соединенные третий элемент задержки, четвертый ключ и -двигатель, последовательно подключенные второй датчик положения и четвертый элемент задержки, а также упоры, примыкающие к ленте конвейера и установленные с возможгоризонтальной плоскости, причем выход четвертого элемента задержностью их ориентации относительно ; укяцих упорах 12 могут занимать толь-;
ко устойчивые положения ьез переворота. Далее при переходе детали 4
ки подключен к второму входу четвертого ключа, третий вход которого соединен с выходом первого датчика положения, четвертый вход - с выходом второго датчика положения, первым входом второго ключа и вторым выс одного упора 12 на другой число устойчивых положений уменьшается аа счет перехода одних устойчивых положений в другие.
55
При подходе сориентированной детали 4 к датчику 21 касания он срабатыходом третьего ключа, а пятый и
15
2530 2510234
вает. Сигнал с датчика 21 касания подается на формирователь 27 импульсов и далее на элемент 28 задержки. Величина задержки элемента 28 выбирается такой, чтобы обеспечить остановку детали 4 на наконечнике 32 последнего упора 12, выполненном в виде стопора. После этого на выходе элемента 28 задерткки, являющемся выходом устройства, появляется сигнал, который используется как сигнал к выполнению цикла робота.
При переходе на работу с другим типом детали процедура настройки и обучения производится заново.
Формула изобретения
10
1. Устройство для управления роботом технологического конвейера, содержащее упор, примыкающий к ленте конвейера, последовательно соединенные первые датчик касания, первый формирователь импульса, первый ключ и блок осветителей, последовательно подключенные блок фотодатчиков и блок формирователей импульса, источник питания, соединенный первым выходом с вторым входом первого ключа, подключенного первым входом к входу первого элемента задержки, отличающееся тем, что, с целью упрощения устройства, оно содержит логический блок, первый датчик положения, последовательно соединенные второй датчик касания, второй формирователь импульса и второй элемент задержки, последовательно подключенные второй ключ, третий датчик Касания, третий формирователь импульса, третий ключ и электромагнит, последовательно соединенные третий элемент задержки, четвертый ключ и -двигатель, последовательно подключенные второй датчик положения и четвертый элемент задержки, а также упоры, примыкающие к ленте конвейера и установленные с возможгоризонтальной плоскости, причем выход четвертого элемента задержностью их ориентации относительно
55
ходом третьего ключа, а пятый и
j1251023
шестой входы - соответственно с вторым и третьим выходами источника питания , подключенного вторым выходом к третьему входу третьего ключа, а первым выходом - к второму входу вто- 5 подключен к выходу устройства, рого ключа, третий вход которого сое дйнен., с выходом логического блока, подключенного первым входом к выходу первого элемента задержки, а вторыми входами - к выходам блока формирователей импульса, выход тр го формирователя импульса соед со входом третьего элемента.за ки, а вьпсод второго элемента з
2. Устройство по п.1, о т л чающееся тем, что в не ры выполнены со сменными након 10 ками.
подключен к выходу устройства,
мирователей импульса, выход третьего формирователя импульса соединен со входом третьего элемента.задержки, а вьпсод второго элемента задержки
5 подключен к выходу устройства,
2. Устройство по п.1, о т л и - чающееся тем, что в нем упоры выполнены со сменными наконечни- 10 ками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботом технологического конвейера | 1987 |
|
SU1526985A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1130829A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Устройство для автоматического ориентирования резьбовых деталей | 1987 |
|
SU1496986A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1140093A1 |
| Устройство для контроля металлизированных отверстий печатных плат | 1986 |
|
SU1420678A1 |
| Устройство для контроля отклонения геометрических параметров деталей | 1983 |
|
SU1138645A1 |
| Устройство для автоматической ориентации предметов | 1987 |
|
SU1452769A1 |
| Устройство для счета семян | 1983 |
|
SU1111186A1 |
| Устройство для счета штучных предметов,перемещаемых конвейером | 1984 |
|
SU1161974A1 |
Изобретение относится к области ро- бототехники и может быть использовано при создании роботов технологических конвейеров. Устройство за счет введения логического блока, датчиков положения, формирователей импульса, датчиков касания, ключей, элементов задержки, электромагнита, двигателя и упоров со сменными наконечниками значительно упрощается. 1 з.п. ф-лы, 1 ил. to СП ND оо
J7
36 3S
f6 1
3
3f
HaoSaraif
Редактор Л.Пчелинская
Составитель ЕоПолитов Техред М.Ходанич
Заказ 5595 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
Корректор {.Максимишинец
| Устройство для управления роботом технологического конвейера | 1980 |
|
SU1096609A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1130829A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
