1
Изобретение ртдюсится к устройствам автоматической ориентации предметов, имеющих форму параллелепипеда с квадратным поперечным сечением, и может найти применение в автоматических устройствах сортировки предметов, например почтовых посыпок, для ориентации перед автоматическим считыванием адреса.
Целью изобретения является повышение надежности работы и скорости ориентации.
На фиг, 1 изображено предложенно устройство, общий вид| на фиг. 2 - фиксатор положения; на фиг. 3 - прицип работы фотодатчика угла поворота; на фиг, 4 - структурная схема блока управления; на фиг. 5 - эпюры напряжений входных и выходных сигналов блока управления.
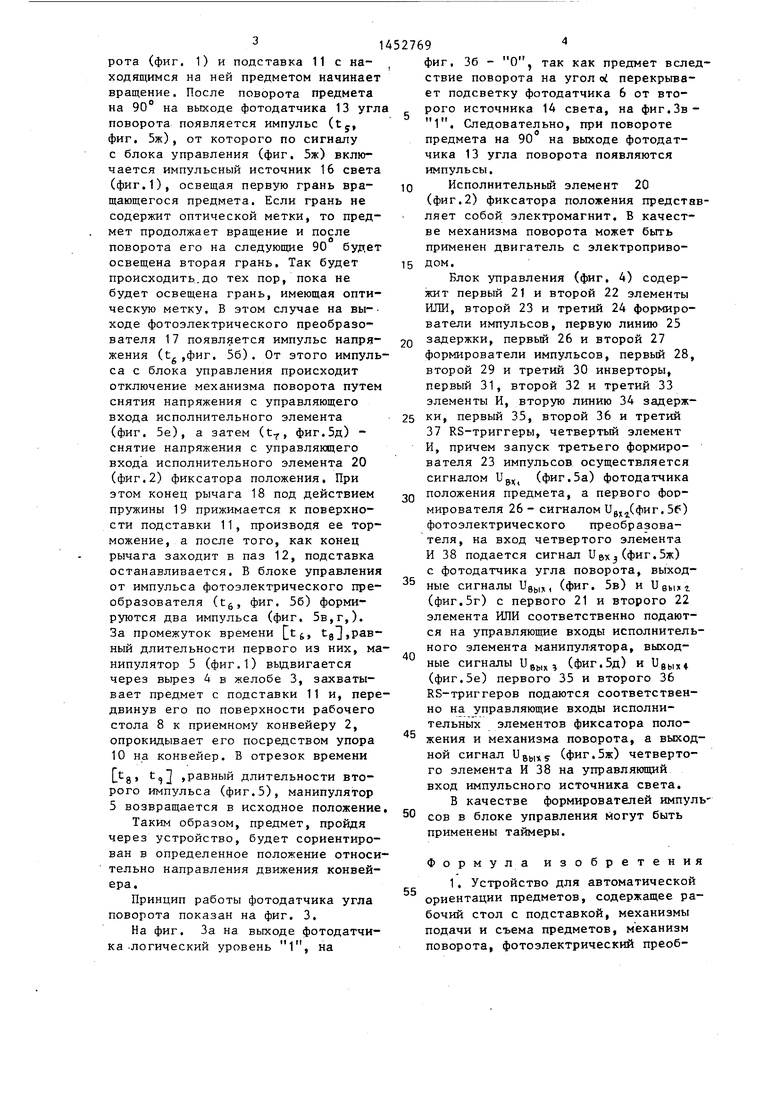
Устройство для автоматической ориентации предметов содержит (фиг. 1 и 2) подающий 1 и приемный 2 конвейеры, сужающийся наклонный желоб 3 с поперечным прямоугольным вьфезом 4, манипулятор 5 с П-образ- ным захватом, фотодатчик 6 положения предмета с подсветкой от первого источника 7 света, рабочий стол 8 с упорами 9 и 10, подставку 11 с пазами 12 на нижней стороне, фотодатчик 13 угла поворота с подсветкой от второго источника 14 света, механизм 15 поворота, третий импульсный источник 16 света, фотоэлектрический преобразователь 17, фиксатор положения, состоящий из рыча.га 18, пружины 19 и исполнительного элемента 20,
Устройство работает следующим образом.
Ориентируемый предмет подается к устройству с помощью подающего конвейера 1 (фиг,1) в положении длинного ребра вдоль конвейера, С 5 подающего конвейера предмет соскальзывает по наклонному сужающемуся желобу 3 к рабочему столу 8, но останавливается упором 9 и остается в желобе, прерывая подсветку фото- 0 датчика 6 положения предмета от
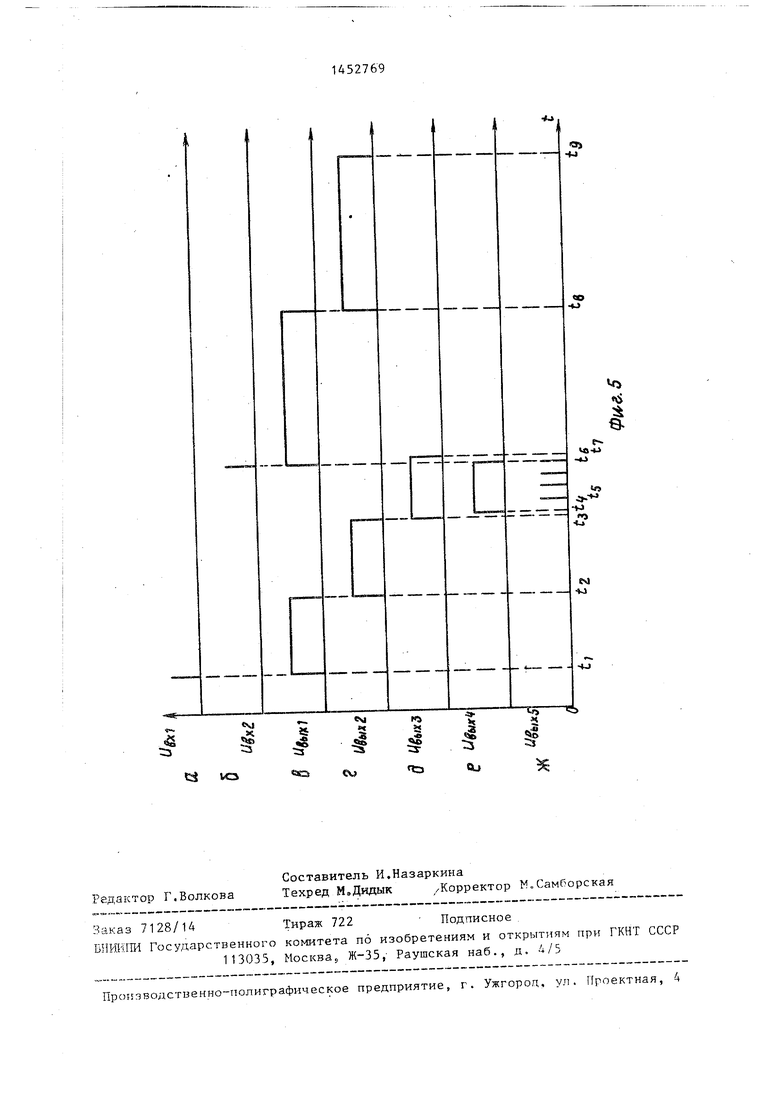
первого источника 7 света. От положительного перепада напряжения на выходе фотодатчика 6 положения предмета (t(, фиг. За) в блоке 5 управления формируются первый
(фиг, 5в) и второй (фиг, 5г) импульсы управления .исполнительньв элементом манипулятора 5 с П-образныМ .захватом (фиг, 1), За промежуток вре- 0 мени Ct,,, равный длительности первого импульса, манипулятор 5 вьщвигается через вырез 4 в желобе 3, захватывает предмет и передвигает его по поверхности рабочего 5 стола 8 на подставку 11, В отрезок времени -з Равный длительности второго импульса, манипулятор 5 возвращается в исходное положение, В момент 1,(фиг,5г) оконча- 0 ния второго импульса на управляющий вход исполнительного элемента 20 (фиг,2) фиксатора положения с блока управления подается напряжение (фиг,5д). При этом исполнительный элемент фиксатора, вращая рычаг 18, выводит конеп рычага из паза 12 в подставке, освобождая его от фиксации. После этого (t, фиг, 5е) с блока управления подается напряжение на управляюпшр вход исполнительного элемента механизма 15 пово5
рота (фиг. 1) и подставка 11 с находящимся на ней предметом начинает вращение. После поворота предмета на 90 на выходе фотодатчика 13 угл поворота появляется импульс (ty, фиг, 5ж), от которого по сигналу с блока управления (фиг. 5ж) включается импульсный источник 16 света (фиг.1), освещая первую грань вращающегося предмета. Если грань не содержит оптической метки, то предмет продолжает вращение и после поворота его на следующие 90 будет освещена вторая грань. Так будет происходить.до тех пор, пока не будет освещена грань, имеющая оптическую метку. В этом случае на вы- ходе фотоэлектрического преобразователя 17 появляется импульс напряжения (tg,фиг. 56). От этого импульса с блока управления происходит отключение механизма поворота путем снятия напряжения с управляющего входа исполнительного элемента (фиг. 5е), а затем (t, фиг.5д) - снятие напряжения с управляющего входа исполнительного элемента 20 (фиг.2) фиксатора положения. При этом конец рычага 18 под действием пружины 19 прижимается к поверхности подставки 11, производя ее торможение, а после того, как конец рычага заходит в паз 12, подставка останавливается. В блоке управления от импульса фотоэлектрического преобразователя (tg, фиг. 5б) формируются два импульса (фиг. 5в,г,). За промежуток времени t, tg jjPSB- ный длительности первого из них, манипулятор 5 (фиг.1) выдвигается через вырез 4 в желобе 3, захватывает предмет с подставки 11 и, передвинув его по поверхности рабочего стола 8 к приемному конвейеру 2, опрокидывает его посредством упора 10 на конвейер. Б отрезок времени
tg, t ,равный длительности второго импульса (фиг.5), манипулятор 5 возвращается в исходное положение
Таким образом, предмет, пройдя через устройство, будет сориентирован в определенное положение относительно направления движения конвейера.
Принцип работы фотодатчика угла поворота показан на фиг. 3.
На фиг. За на выходе фотодатчика -логический уровень 1, на
фиг. 36 - О, так как предмет вследствие поворота на угол oi перекрьгеа- ет подсветку фотодатчика 6 от второго источника 14 света, на фиг.Зв- 1, Следовательно, при повороте предмета на 90 на выходе фотодатчика 13 угла поворота появляются импуль сы.
Исполнительный элемент 20
(фиг.2) фиксатора положения представляет собой электромагнит, В качестве механизма поворота может быть применен двигатель с электропривоДОМ.
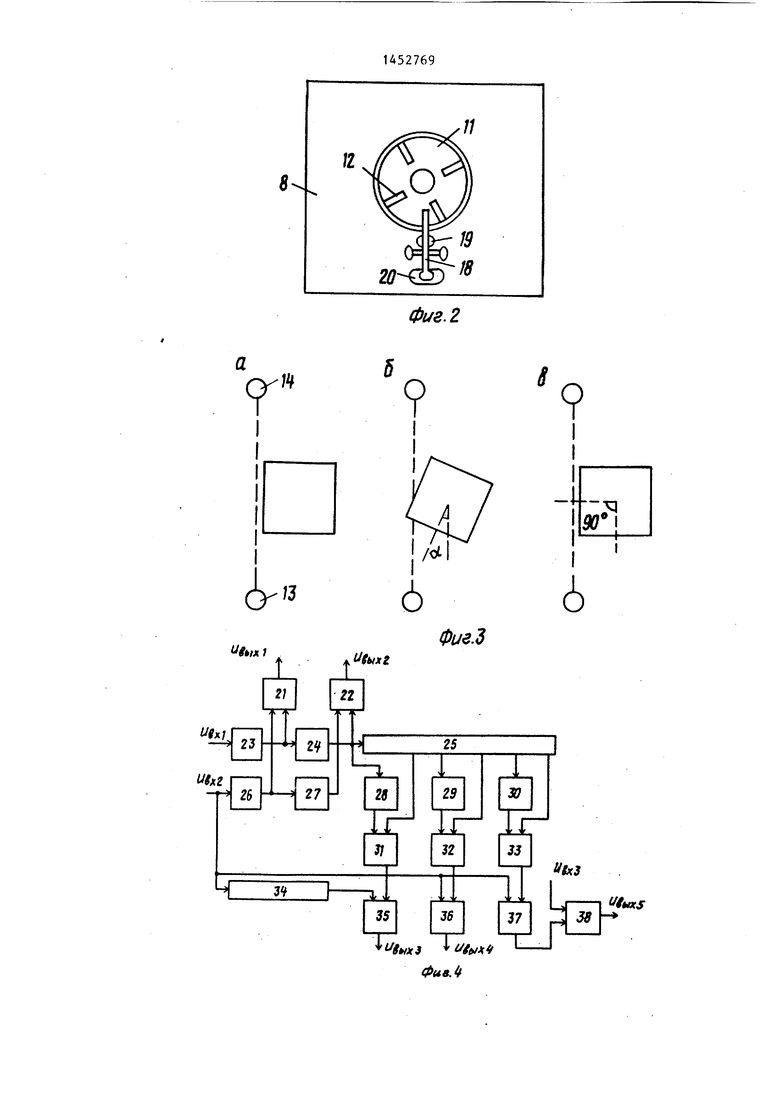
Блок управления (фиг, 4) содержит первый 21 и второй 22 элементы ИЛИ, второй 23 и третий 24 формирователи импульсов, первую линию 25
задержки, первый 26 и второй 27
формирователи импульсов, первый 28, второй 29 и третий 30 инверторы, первый 31, второй 32 и третий 33 элементы И, вторую линию 34 задержки, первый 35, второй 36 и третий 37 RS-триггеры, четвертый элемент И, причем запуск третьего формирователя 23 импульсов осуществляется сигналом Ug, (фиг.5а) фотодатчика положения предмета, а первого формирователя 26- сигналом Ugjj(фиг.56) фотоэлектрического преобразователя, на вход четвертого элемента И 38 подается сигнал UBX () с фотодатчика угла поворота, выходные сигналы Ugj,,,, (фиг, 5в) и Ugbui (фиг,5г) с первого 21 и второго 22 элемента ИЛИ соответственно подаются на управляющие входы исполнительного элемента манипулятора, выход
ные сигналы Ug, (фиг.5д) и Ugbix (фиг.5е) первого 35 и второго 36 RS-триггеров подаются соответственно на управляющие входы исполнительных элементов фиксатора положения и механизма поворота, а выходной сигнал Usbiiis (фиг.5ж) четвертого элемента И 38 на управляющий вход импульсного источника света,
В качестве формирователей импуль сов в блоке управления йогут быть применены таймеры.
Формула изобретения
1, Устройство для автоматической ориентации предметов, содержащее рабочий стол с подставкой, механизмы подачи и съема предметов, механизм поворота, фотоэлектрический преобразователь и источники света, о т- личающееся тем, что, с целью повьппения надежности работы и скорости ориентации, оно снабжено фотодатчиками положения и угла поворота предметов, фиксатором положения предметов, установленными на рабочем столе, импульсным источником света и блоком управления, сооту ветствукщие входы которого соединены с выходами фотодатчиков положения, угла поворота и фотоэлектрического преобразователя, выходы - с входами манипулятора, исполнительными элементами фиксатора положения и механизма поворота и импульсного источника света, а механизмы подачи и съема предметов выполнены в виде подающего и приемного конвейеров, снабженных манипулятором с П-образ ным захватом, подающий конвейер соединен с рабочим столом наклонным сужающимся желобом с поперечным прямоугольным вырезом под манипулятор, на рабочем столе в месте соединения с подающим конвейером установлен фотодатчик положения и первы упор, в месте соединения с приемным конвейером - второй упор, фотодатчик поворота и импульсный источник света, в центре рабочего стола установлена подставка для предмета в форме диска с четырьмя пазами, укрепленная на валу механизма поворота.
2, Устройство по п.1, отличающееся тем, что блок упраления содержит первьй и второй, третий и четвертый элементы И, первый, второй и третий RS-триггеры, первую и вторую линии задержки и первый, второй, третий и четвертый формирователи импульсов, вход первого из которых является первым входом блока управления, выход первого формирователя соединен с первым входом первого элемента ИЛИ, второй вход которого соединен с выходом третьего формирователя импульсов, выход которого является первым выходом блока управления и соединен с входом второго формирователя импульсов, выход которого соединен с первым входом второго элемента
ИЛИ, выход которого является вторым выходом блока управления и соединен с входами первого инвертора и первой линии задержки, первый, третий и пятый выходы которой соединены с
первыми входами соответственно первого, второго и третьего элементов И, вторые входы которых соединены с выходами соответствующих инверторов, входы второго и третьего из
которых соединены соответственно с вторым и четвертым выходами первой линии задержки, выходы элементов И соединены соответственно с первыми входами соответствующих RSтриггеров, второй вход первого из которых соединен с выходом первой линии задержки, вторые входы второго и третьего триггеров соединены с входом первой линии задержки, с
входом третьего формирователя импульсов, который является вторым входом блока управления, выход третьего формирователя импульсов соединен с вторым входом первого элемента ИЛИ и с входом четвертого формирователя импульсов, выход которого соединен с вторым входом второго элемента ИЛИ, выходы первого и второго RS-триггеров являются третьим и четвертым выходами блока управления, выход третьего RS-триггера соединен с первым входом четвертого элемента И, второй вход которого является третьим входом блока управления, выход четвертого элемента И
является пятым выходом блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное устройство поштучной выдачи с автоматическим ориентированием | 1989 |
|
SU1745644A1 |
| Устройство для управления роботом технологического конвейера | 1980 |
|
SU1096609A1 |
| Устройство для автоматического управления подачей изделий загрузочным и транспортным механизмами | 1982 |
|
SU1105864A1 |
| Устройство для распознавания и учета предметов по типоразмеру | 1987 |
|
SU1460731A1 |
| Автомат для контроля и сортировки деталей | 1986 |
|
SU1377160A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОСЛЕПЛЕНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1993 |
|
RU2097223C1 |
| Устройство для сортировки деталей по типоразмерам | 1983 |
|
SU1169763A1 |
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU798710A1 |
| Устройство для равнения кромки движущегося рулонного материала | 1990 |
|
SU1754607A1 |
| Фотоэлектрический счетчик | 1980 |
|
SU892455A1 |
Изобретение относится к устройствам ориентации предметов формы параллелепипеда с квадратным сечением. Устройство содержит подающий 1, приемный 2 конвейеры, желоб 3 с поперечным вырезом 4, манипулятор 5, рабочий стол 8 с упорами 9 и 10 и подставкой 11 с пазами 12, механизмы подачи и съема предметов. Для повышения надежности работы и скорости ориентации в устройство введены фотодатчики 13 угла поворота с подсветкой от источника 14 света, фиксатором положения, состоящим из рычага 18, пружины 19 и исполнительного элемента 20, и блоком управления (БУ). Фотодатчик 6 установлен в месте соединения с подающим конвейером, фотодатчик 13 поворота - в месте соединения с приемным конвейером. В центре стола 8 установлена поворотная подставка 11. Ориентируемый предмет по подающему конвейеру 1 подается длинным ребром вдоль конвейера. По наклонному желобу 3 предмет соскальзывает к столу 8, но останавливается упором 4. По сигналам с фотодатчика 6 ввдвигается захват манипулятора 5, который перемещает предмет на подставку 11 стола (Л
cr
I
()З
fьtn 1
Фиг. 2
Фие.З
.((ыяг
) («
Фu.
AJ ,
| Устройство для автоматической ориентациишиН | 1979 |
|
SU835907A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
