Известны транспортеры с программным устройством-, обеспечивающим в определенных произвольных точках разгрузку транспортируемых изделий путем гравитационного бокового смещения их, включающим адресователи, расположенные на движущемся рабочем органе, -и взаимодействующие € ними разгружате чи, укрепленные в местах разгрузки на станине транспортера.
В описываемом транспортере, с целью обеспечения поступательновозвратного перемещения обрабатываемого изделия в любой требующейся -последовательности, для более целесообразного выполнения процесса производства адресователи программного устройства выполнены в виде двух горизонтально-перестаЕ«ых и вертикально-подвижных стержней, а разгружатели - в виде упоров, состоящих из двух сооснь1х, входящих один в другой, валиков. На одних концах валики снабжены взаимодействующими со стержнями подвижными стойками изменяемого профиля, а на других - кулачками, взаимодействующими с приспособлением, удерживающим изделие на несущем органе транспортера.
Удерживающее приспособление выполнено в виде прикрепленного шарнирно к несущему органу двуплечего рычага. Одним концом двуплечий рычаг взаимодействует с изделием, а вторым-с прикрепленным к станине транс-портера бортом, имеющим в местах разгрузки откидные участки, удерживаемые кулачками упоров разгружателя.
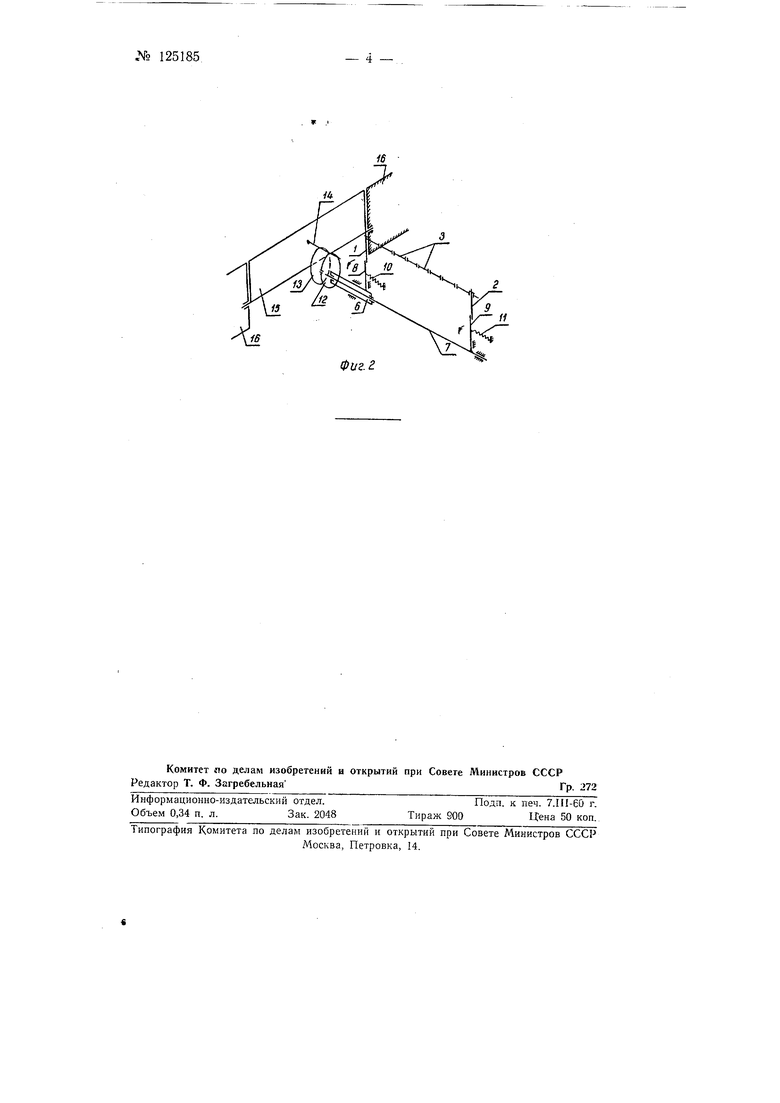
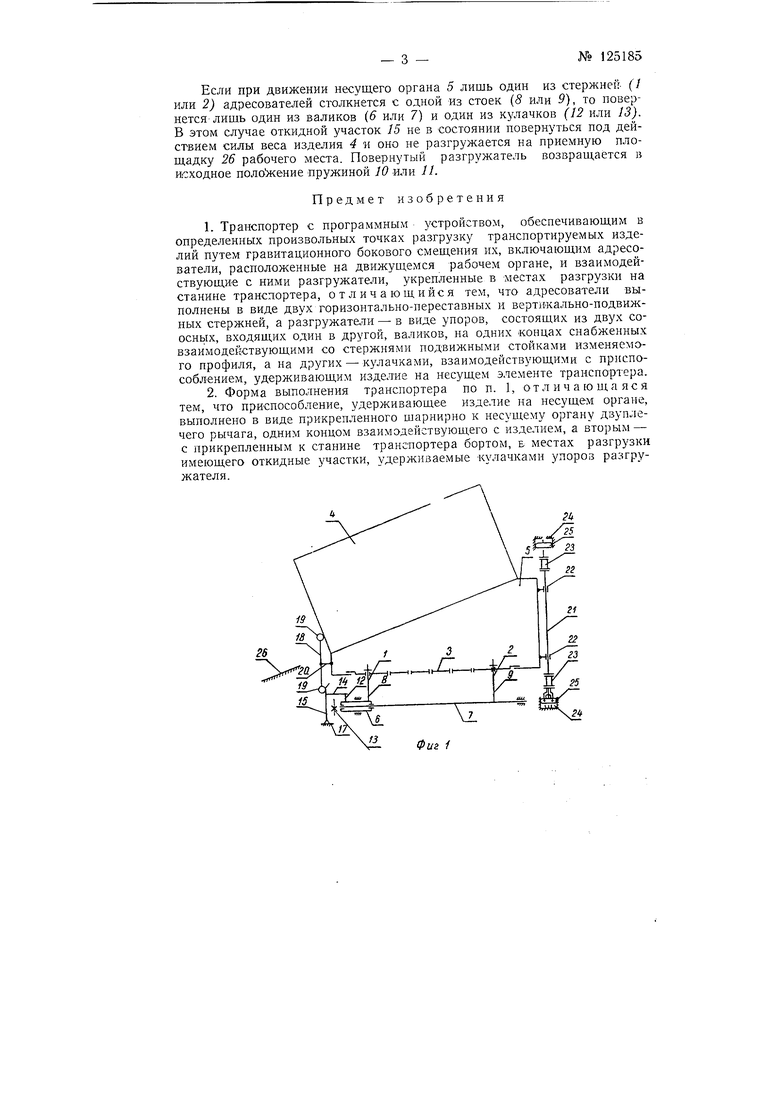
На фиг. схематически изображено программное устройство двухцепного горизонтально-замкнутого транспортера; на фиг. 2 - то же, в аксонометрии.
Для задания программы программное устройство снабжено двумя адресователями, выполненными в виде двух горизонтально-переставных стержней 1 и 2, вставляемых вертикально в программную планку 3 устройства в различных комбинациях, предусмотренных технологическим процессом производства данного изделия. Различные комбинации
расположения стержней / и i в пpoгpa мнoй планке 3 предопределяют рабочее место, куда направляют обрабатываемое изделие 4 (или съемный контейнер с изделиями) для выполнения очередной операции.
Программная плапка 3 закреплена на нижней поверхности нес)щего ортана 5 транспортера. Обрабатываемое изделие 4, транспортируемое несущим органом 5, расположено на его наклонной поверхности и задерживается на ней удерживающим приспособлением.. Угол уклона наклонной поверхности больше угла естественного откоса и обеспечивает гравитационную разгрузку с нее транспортируемого изделия.
Около каждого рабочего места смонтированы два разгрзжателя, выполненные в виде упоров, состоящих из двух соосных входящих один в другой валиков и 7, свободно поворачивающихся один относительно другого. На правых концах валики 6 и 7 снабжены подвижными стойками 8 и 9 из.меняемого профиля, удерживаемыми в вертикальном положении пружинами 10 и 1L Расстояние между подвижными стойками 8 и 9 строго определено для каждого рабочего места и соответствует одному из возможных расстояний между горизонтально-переставными стержнями / и .2 адресователей, вертикально вставленных в той или иной комбинации в программную планку 3. Подвижные стойки 8 н 9 разгружателей взаимодействуют с горизонтально-переставными стержнями У и 2 адресователей. На левых концах валиков 6 н 7 жестко укреплены Кулачки J2 и 13, взаимодействующие с рычагом 14, прикрепленны.м к откидному участку 15 борта }6. Борт 16 жестко прикреплен к станине 17 вдоль всего транспортера. В местах разгрузки изделия 4 у каждого рабочего места, борт снабжен откидным участком J5.
Удерживающее приспособление выполнено в виде двуплечего рычага 18 с щаровы.ми наконечниками 19, прикрепленного щарнирно к заднему торцу несущего органа 5 с помощью кронщтейна 20. Одни.м шаровым наконечником 19 двуплечий рычаг 18 взаимодействует с изделием 4, -размещенным на наклонной поверхности несущего органа, а вторым - с бортом 16. Несзщий орган 5 с помощью вала 21 и кронштейнов 22 закреплен на цепях 23 транспортера и удерживается от горизонтальных и вертикальных смещений направляющими 24 и ролика.ми 25.
Програм.мное устройство срабатывает лищь в том случае, когда при движении несущего органа 5 горизонтально-переставные стержни / п 2 адресователей столкнутся у рабочего места с обеими подвижными стойками (5 и 5 разгружателей. В этом случае валики 5 и 7 и .закрепленные на них кулачки 12 и 13 повертываются и позволяют откидному участку 15 борта 16 по-вернуться и освободить взаимодействующий с ним двуплечий рычаг 18. Двуплечий рычаг поворачивается против часовой стрелки и изделие 4 под действием собственного веса соскальзывает на приемную полку 26 рабочего места. Пружины 10 н 11 возвращают разгружатели в исходное положение.
После выполнения операции рабочий переставляет стержни У и 2 адресователей согласно марщрутной карте технологического процесса на первом подошедщем к рабочему месту свободно несущем органе и устанавливает на нем изделие, которое транспортируется к заданному программой рабочему месту.
Если у рабочего имеется достаточный запас заготовок, то он закрепляет откидной участок 15, отключая разгружатели, и программное устройство не срабатывает у этого рабочего места.
Если при движении несущего органа 5 стержни 1 и 2 адресователей не столкнутся у рабочего места со стойками 8 и 9 разгружателей, то программное устройство не сработает и изделие не разгрузится у этого рабочего места.
Если при движении несущего органа 5 лишь один из стержней- (/ или 2) адресователей столкнется с одной из стоек (8 или 9), то повернется лишь один из валиков {6 или 7) и один из кулачков (12 или 13). В этом случае откидной участок 15 не в состоянии новернуться под действием силы веса изделия 4 и оно не разгружается на приемную плош,адку 26 рабочего места. Повернутый разгружатель возвраш,ается в исходное положение пружиной 10 или 11.
Предмет изобретения
1.Транспортер с программным устройством, обеспечиваюш,им в определенных произвольных точках разгрузку транспортируемых изделий путем гравитационного бокового смеш,ения их, включаюш.им адресователи, расположенные на движушемся рабочем органе, и взаимодействуюш,Ие с ними разгружатели, укрепленные в местах разгрузки на станине транспортера, отличаюш,ийся тем, что адресователи выполнены в виде двух горизонтально-переставных и верти«ально-подвил ных стержней, а разгружатели - в виде упоров, состоящих из двух соocHbix, входящих один в другой, валиков, на одних концах снабженных взаимодействующими со стержнями подвижными стойками изменяемого профиля, а на других-кулачками, взаимодействующими с приспособлением, удерживающим изделие на несущем элементе транспортера.
2.Форма выполнения транспортера по п. 1, отличающаяся тем, что приспособление, удерживающее изделие на несущем органе, выполнено в виде прикрепленного шарнирно к несущему органу двуплечего рычага, одним концом взаимодействующего с изделием, а вторым - с прикрепленным к станине транспортера бортом, Е местах разгрузки имеющего откидные участки, удерживаемые кулачками упоров разгружателя.
Фиг i
l
Фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортер с программным устройством | 1959 |
|
SU125186A1 |
| Устройство для смены шпуль на кольцевых ватерах | 1939 |
|
SU59460A1 |
| РАСПРЕДЕЛИТЕЛЬНЫЙ КОНВЕЙЕР | 1970 |
|
SU278534A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Захват для пакетов изделий | 1958 |
|
SU118963A1 |
| Автомат для складывания штучных текстильных изделий, например полотенец | 1961 |
|
SU144461A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ «ШПАС» | 1969 |
|
SU236971A1 |
| Приспособление к ленточным и тому подобным машинам прядильного производства для автоматической присучки новой ленты к концу оборвавшейся | 1935 |
|
SU47578A1 |
| ГЛУБОКОРАСТОЧНОЙ СТАНОК | 1971 |
|
SU424671A1 |
| ЛИНИЯ НАБОРА НОСЫЛОВ ПЕЧАТИ В ГАЗЕТНО- ЖУРНАЛЬНЫХ ЭКСПЕДИЦИЯХ | 1972 |
|
SU341540A1 |