Изобретение относится к подъемно-транспортному машиностроению, а именно к кранам-манинуляторам.
Цель изобретения - снижение энергоемкости.
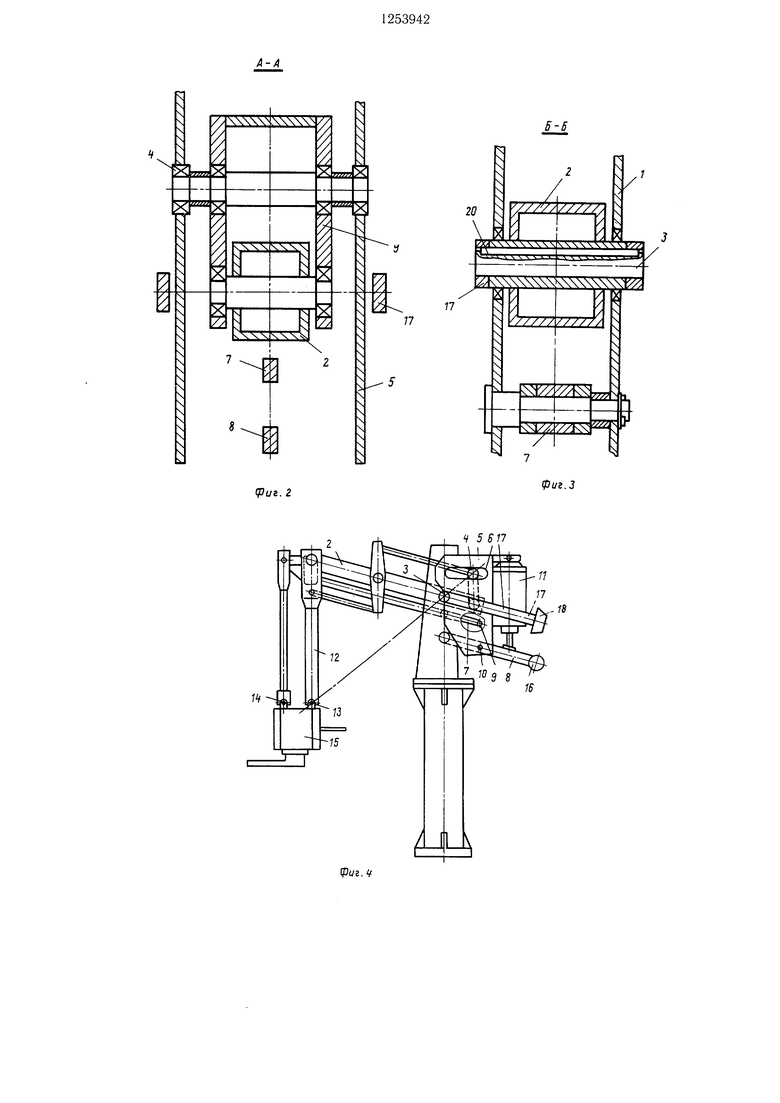
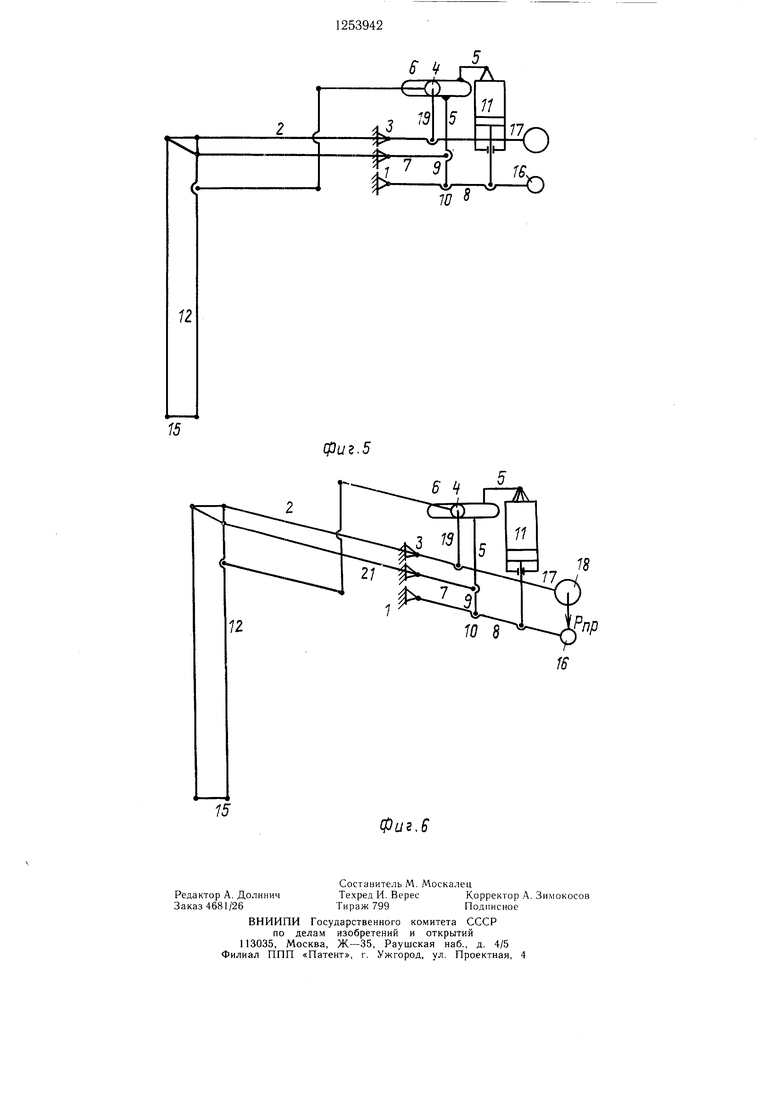
На фиг. 1 показан кран-манипулятор, общий вид (положение I); на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - кран-манипулятор в промежуточном положении (положение II); на фиг. 5 - кинематическая схема крана-манипулятора в положении I; на фиг. 6 - то же, положение И.
Кран-манипулятор состоит из колонны 1, грузовой стрелы 2, выполненной в виде шарнирного параллелограмма. Грузовая стрела 2 (шарнирный параллелограмм) шарнир- но соединена с колонной 1 посредством оси 3. Шарнирный параллелограмм с помош,ью другой оси 4 шарнирно соединен с вертикальными ш,еками 5 подвижного корпуса. Ось 4 установлена с возможностью продольного перемещения в горизонтальных пазах 6, которые выполнены в щеках 5 подвижного корпуса. Подвижный корпус шарнирно закреплен на рычагах 7 и 8 вспомогательного шарнирного парал.телограмма с помощью осей 9 и 10. Вспомогательный шарнирный параллелограмм также щарнирно закреплен на колонне 1. Основной и вспомогательный шарнирные параллелограммы расположены по разные стороны от колонны 1. На нижнем рычаге 8 вспомогательного шарнирного параллелогра.м.ма шарнирно закреплен шток пневмоцилиндра 11, корпус которого шарнирно соединен со щеками 5 подвижного корпуса и расположен между ними. Подвижный корпус размещен относительно.колонн 1 со стороны вспомогательного щарнир- ного параллелограмма. Ось 4 шарнирного соединения основного шарнирного параллелограмма со щеками подвижного корпуса расположена выше оси 4 шарнирного соединения его с колонной.
С грузовой стрелой 2 щарнирно соединена рукоять 12, на шарнирах 13 и 14 которой крепится блок с грузозахватом 15. На свободном конце рычага 8 вспомогательного шарнирного параллелограмма закреплен регулировочный противовес 16. На оси 3 закреплен рычаг 17 с противовесом 18. Рычаг 17 связан с грузовой стрелой 2 распоркой 19. Рычаг 17 жестко закреплен на оси
3 посредством шпонки 20. Противовесом 18 центр тяжести стреловой системы (пантографа) выведен на диагональ, соединяющую ось 4, ось 3 и шарнир 13, чем обеспечено постоянство реакции в оси 4 (неизменное при перемещении оси 4 по горизонтальным
пазам щек 5 подвижного корпуса). Реакция в оси 4 уравновешена массой подвижного корпуса 1 и пневмоцилиндра 11, а также регулировочным противовесом 16, благодаря чему на щток пневмоцилиндра 11 реакция
не передается.
Кран-манипулятор работает следующим образом.
При подъеме груза, который крепится к блоку 15, подается воздух в пневмоци- линдр 11. Его шток воздействует на рычаг 8
вспомогательного параллелограмма, содержащего также и рычаг 7, который через ось 9 воздействует на щеки 5 подвижного корпуса. Последний в свою очередь через распорку 19 воздействует на грузовую стрелу 2, закрепленную на колонне 1, на которой установлена рукоять 12. Последняя поднимает (опускает) блок с грузозахватом 15, подвешенный на шарнирах 13 и 14. При перемещении рукояти 12 от колонны (к колонне) ось 4 передвигается в горизонтальных пазах 6 щек 5 подвижного корпуса. За счет параллелограмма, который образован рукоятью 12, блоком 15 и прилегающими рычагами, блок с грузозахватом движется параллельно полу. За счет крепления грузовой стрелЕл 2 непосредственно на колонне 1
увеличивается его жесткость, особенно на кручение, что обеспечивает надежное консольное удержание груза (в том числе при положении консоли перпендикулярно плоскости стреловой системы). За счет жесткого крепления рычага 17, на котором установлен противовес 18 с грузовой стрелой 2 посредством штока 20 на оси 3 имеется возможность полного уравновешивания за счет массы подвижного корпуса, пневмоцилиндра и регулировочного противовеса 16.
Б-S
77
риг. i
фиг.2
Iff
1S
Lr
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор | 1988 |
|
SU1517251A1 |
| СТРЕЛОВОЙ КРАН | 1993 |
|
RU2045466C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| Горная машина | 1985 |
|
SU1293332A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| ПЛАВУЧИЙ ПОДЪЕМНЫЙ КРАН БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2003 |
|
RU2258026C2 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
/5
фиг. 5
Р.„ 7g
//f
Фиг.6
Составитель М. Москалец
Техред И. ВересКорректор А. Зимокосов
Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Проспект на кран-манипулятор | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
