Изобретение относится к подъемно- транспортному оборудованию, а именно к сбалансированным манипуляторам.
Цель изобретения - повьш1ение точности позиционирования за счет уменьшения массы противовеса.
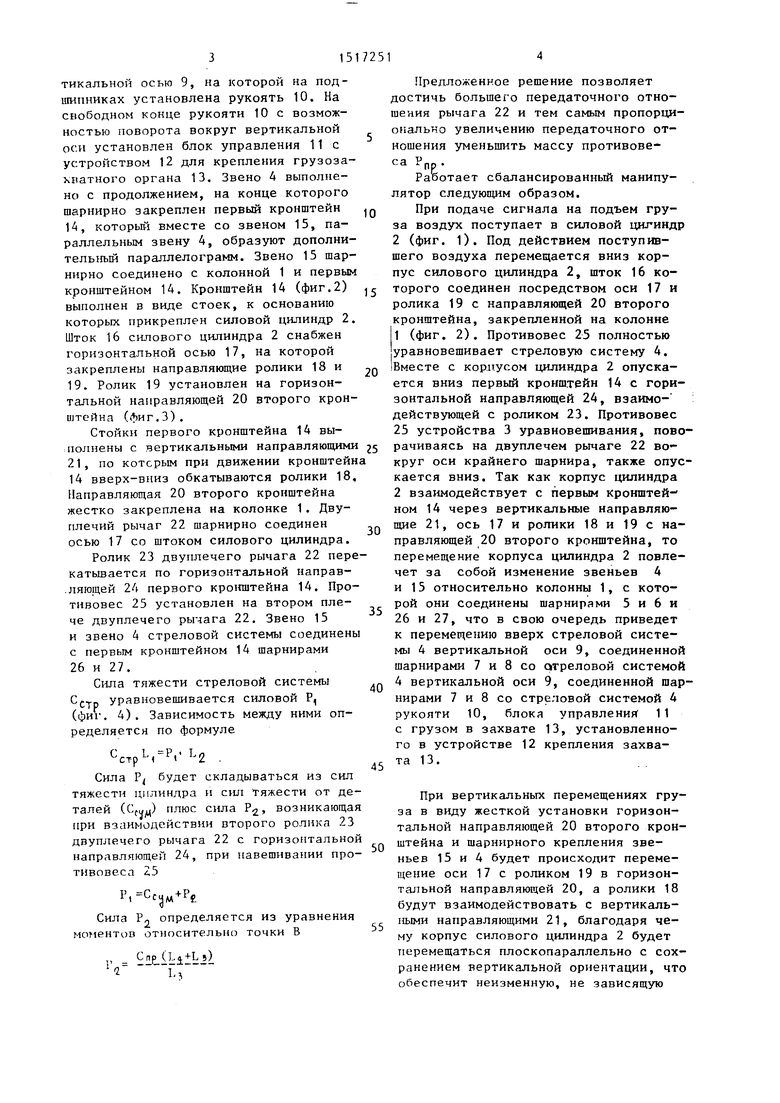
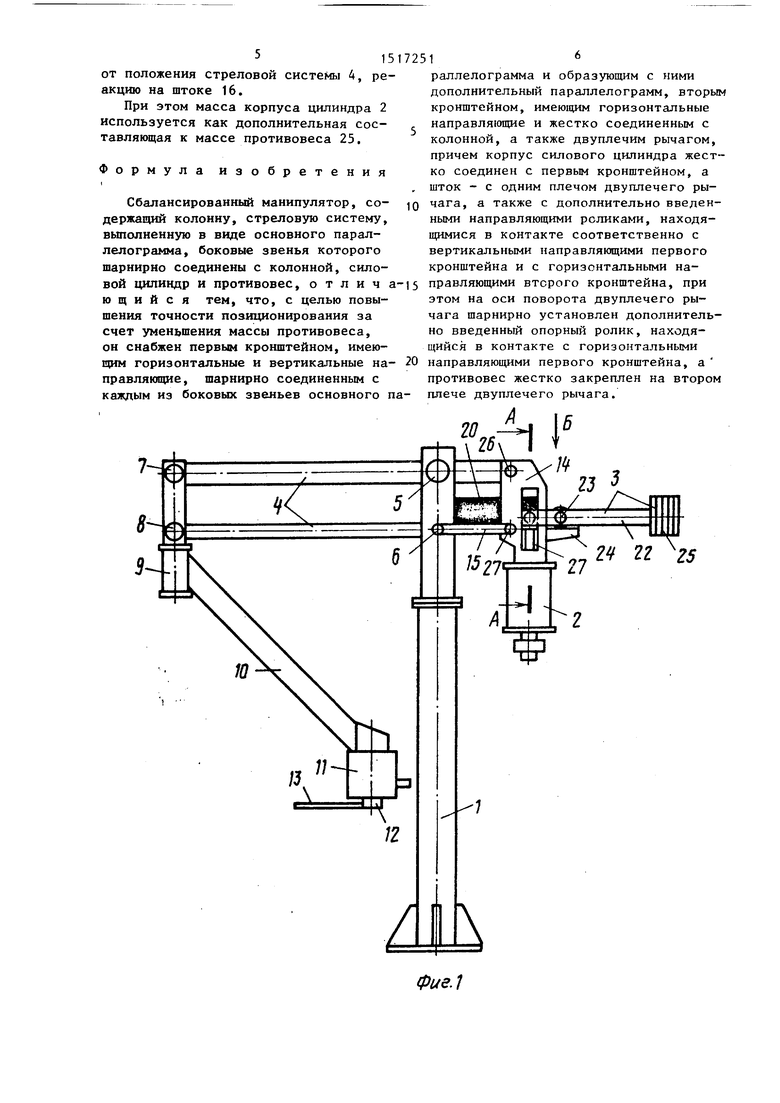
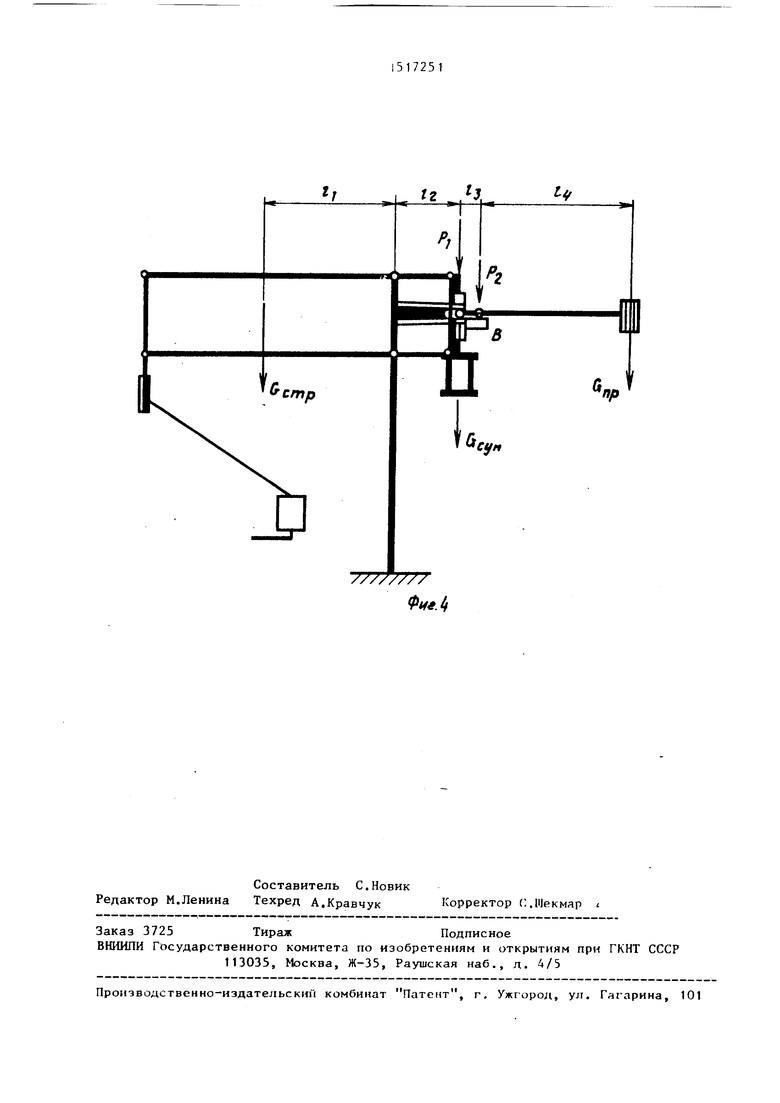
На фиг. 1 изображен сбалансированный манипулятор, общий вид; на фиг.2- разрез А-А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1; на
фиг. 4 - схема действия сил на манипуляторе.
Манипулятор (фиг. 1) состоит из колонны 1, стреловой системы, силового цилиндра 2, устройства уравновешивания 3 и системы управления. Стреловая система образована боковыми звеньями 4 основного параллелограмма, связанными шарнирами 5 и 6 с колонной 1 и шарнирами 7 и 8 - с вер
315
тикальной осью 9, на которой на под- шииниках установлена рукоять 10. На СЕюбодном конце рукояти 10 с возможностью поворота вокруг вертикальной оси установлен блок управления 11 с устройством 12 для крепления грузозахватного органа 13. Звено 4 выполнено с продолжением, на конце которого шарнирно закреплен первый кронштейн 14, который вместе со звеном 15, параллельным звену 4, образуют дополнительный параллелограмм. Звено 15 шарнирно соединено с колонной 1 и первым кронштейном 14. Кронштейн 14 (фиг.2) выполнен в виде стоек, к основанию которых прикреплен силовой цилиндр 2. Шток 16 силового цилиндра 2 снабжен горизонтальной осью 17, на которой закреплены направляющие ролики 18 и 19. Ролик 19 установлен на горизонтальной направляющей 20 второго кронштейна (Лиг.3).
Стойки первого кронштейна 14 выполнены с вертикальными направляющими 21, по которым при движении кронштейн 14 вверх-вниз обкатываются ролики 18, Направляющая 20 второго кронштейна жестко закреплена на колонке 1. Двуплечий рычаг 22 шарнирно соединен осью 17 со штоком силового цилиндра.
Ролик 23 двуплечего рычага 22 пере катьтается по горизонтальной направляющей 24 первого кро штейна 14. Противовес 25 установлен на втором плече двуплечего рычага 22. Звено 15 и звено 4 стреловой системы соединены с первым кронштейном 14 шарнирами 26 и 27.
Сила тяжести стреловой системы стр уравновешивается силовой Р, (фиг. 4). Зависимость между ними определяется по формуле
2 .
Сила Р будет складываться из сил тяжести цилиндра и сил Тяжести от деталей (Cfu) плюс сила Р2, возникающая при взаимодействии второго ролика 23 двуплечего рычага 22 с горизонтальной напр являющей 24, при навешивании противовеса 25
1(
+ Р
Сила РТ определяется из уравнения моментов относительно точки В
0
0
5
0
5
Q
5
Предложенное решение позволяет достичь большего передаточного отношения рычага 22 и тем самым пропорционально увеличению передаточного отношения уменьшить массу противовегя V
са . рр .
Работает сбалансированный манипулятор следующим образом.
При подаче сигнала на подъем груза воздух поступает в силовой цкгиндр 2 (фиг. 1). Под действием поступившего воздуха перемещается вниз корпус силового цилиндра 2, шток 16 которого соединен посредством оси 17 и ролика 19 с направляющей 20 второго кронштейна, закрепленной на колонне
1(фиг, 2). Противовес 25 полностью уравновешивает стреловую систему 4. Вместе с корпусом цилиндра 2 опускается вниз первый кронштейн 14 с горизонтальной направляющей 24, вэаимо- действующей с роликом 23. Противовес
25устройства 3 уравновешивания, поворачиваясь на двуплечем рычаге 22 вокруг оси крайнего шарнира, также опускается вниз. Так как корпус цилиндра
2взаимодействует с первым кронштей- ном 14 через вертикальные направляющие 21, ось 17 и ролики 18 и 19 с направляющей 20 второго кронштейна, то перемещение корпуса цилиндра 2 повлечет за собой изменение звеньев 4
и 15 относительно колонны 1, с которой они соединены шарнирами 5 и 6 и
26и 27, что в свою очередь приведет к перемещению вверх стреловой системы 4 вертикальной оси 9, соединенной шарнирами 7 и 8 со атреловой системой 4 вертикальной оси 9, соединенной шарнирами 7 и 8 со стреловой системой 4 рукояти 10, блока управлений 11
с грузом в захвате 13, установленного в устройстве 12 крепления захвата 13.
При вертикальных перемещениях груза в виду жесткой установки горизонтальной направляющей 20 второго кронштейна и шарнирного крепления звеньев 15 и 4 будет происходит перемещение оси 17 с роликом 19 в горизонтальной направляющей 20, а ролики 18 будут взаимодействовать с вертикальными направляющими 21, благодаря чему корпус силового цилиндра 2 будет перемещаться плоскопараллельно с сохранением вертикальной ориентации, что обеспечит неизменную, не зависящую
гч 22 75
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1324843A1 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| МАРКЕР | 2007 |
|
RU2331177C1 |
| Уравновешивающее подъемное устройство | 1984 |
|
SU1232637A1 |
| Кран-манипулятор | 1984 |
|
SU1253942A1 |
| УСТРОЙСТВО ДЛЯ СБРАСЫВАНИЯ ГРУЗОВ | 1996 |
|
RU2099249C1 |
| МЕХАНИЗМ ДЛЯ ПОВОРОТА СТРЕЛЫ МАНИПУЛЯТОРА | 2011 |
|
RU2456227C1 |
| Шасси транспортного средства дляпЕРЕВОзКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU839784A1 |
| Стреловой кран | 1990 |
|
SU1791356A1 |
| Кондуктор для монтажа стволов башенных конструкций | 1977 |
|
SU737607A1 |
Изобретение относится к подъем- но- транспортному оборудованию, а именно к сбалансированным манипуляторам. Цель изобретения - повышение точности позиционирования за счет уменьшения массы противовеса. При подаче сигнала на подъем груза воздух поступает в силовой цилиндр 2, перемещая вниз его корпус, жестко соединенный с первым кронштейном 14. Шток силового цилиндра взаимодействует с горизонтальными направляющими 20 второго кронштейна, жестко установленного на колонне 1 посредством направляющих роликов. Перемещение корпуса силового цилиндра 2 и первого кронштейна 14 ведет к изменению конфигурации дополнительного параллелограмма за счет поворота в шарнирах 5, 6, 26 и 27 его звеньев. При этом происходит подъем стреловой системы, выполненной в виде основного параллелограмма с боковыми звеньями 4. Противовес 25, установленный на втором плече двуплечего рычага 22, поворачивается вместе с этим рычагом относительно оси поворота, шарнирно соединенной с опорным роликом 23, находящимся в контакте с горизонтальной направляющей 21 первого кронштейна. Уравновешивающее усилие передается первым плечом двуплечего рычага 22 на шток силового цилиндра за счет шарнирного соединения. При вертикальных перемещениях груза корпус силового цилиндра 2 перемещается плоско- параллельно с сохранением вертикальной ориентации. 4 ил. с (Л ел ю :л
Фие.1
Вид Б
| Манипулятор | 1979 |
|
SU795934A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
