Изобретение относится к весоизмерительной технике, может быть использовано для измерения веса груза в ковше одноковшового экскаватора и является дополнительным к . № 1041879,
Известный способ определения вес груза заключается в измерении длин тягового и подъемного канатов, угла наклона стрелы экскаватора к горизонту и усилия подъема, в многократном определении координат ковша и вычислении средних арифметических значений веса груженого и поров;него ковша и.их разности в каждом рабоче цикле, выполнении измерений по всей траектории перемещения ковша, определении по среднему арифметическому размаха и границ выборки и вычислении веса, как выборочного среднего.
Целью изобретения является повышение точности и надежности определения веса.
За счет определения частотного спектра случайного процесса количества груза в ковше экскаватора и характерных максимумов этого спектра способ позволяет определять вес груза перемещаемого ковшом экскаватора с любой заданной точностью.
Горная масса, перемещаемая ковшом в. транспортное средство, неоднородна по своим физико-химическим свойствам, подвержен изменениям характер ведения буровзрывных работ различна квалификация обслуживающего персонала, что обуславливает случайный характер процессов перемещения массы ковшом экскаватора и количества горной массы, загружаемой в транспортное средство,,
Экспериментально определена корреляционная функция случайного процесса количества груза перемещаемого ковшом экскаватора, которая аппроксимирована аналитическим выражением
)ПЛ +Djl J cos,1 +
+ (Г)
D , Dj, D - дисперсии составлякжщх процесса; d,,o(j,ot,j- декременты затухания,
7 - независимая переменная i
543082
р ,- частота гармонической составляющей.
Случайный процесс количества 5 груза, перемещаемого ковшом экскаватора, с корреляционной функцией, заданной вьфажением (1), относится к ряду мультипликатных и нестационарных. Но для отработки одного 10 и того же забоя при идентичности технологических факторов процесс стационарен в широком смысле. Участки стационарности выделяются из условия стремпения к нулю корре- 5 пяционной функции R() при достаточно длинном интервале наблюдения
(г -).
Предлагаемый способ может быть проиллюстрирован следующим примером.
20Вьделяется участок частотного
спектра в области низких частот,который, согласно исследованиям, проведенным в условиях железорудных предприятий (учтены физико-механи25 ческие свойства добьгеаемых руд),соответствует его экстремальной зоне. Установлено, что для разрабатываемых пород характерньми частотами случайного процесса количества груза, пере30 мещаемого ковшом экскаватора, являются частоты в диапазоне 8,4 рад/с - 16,8 рад/с.
Проведенные исследования показали, что объем выборки п 14 обеспечивает относительную точность б 0,05, доверительную вероятность t 0,95. Он определен по формуле
где п - объем выборки,
6 среднее квадратическое откл о некие,
о - относительная точность,
t - аргумент по функции Лапласа В процессе загрузки транспортного средства одноковшовым экскаватором получают нес перемещаемой горной массы в каждом рабочем цикле как выборочное среднее, результаты 14 рабочих циклов накапливают в блоке оперативной памяти и по алгоритму, запрограммированному в блоке програм- мкрующей матрицы, проверяют вьтол- нение условия RCt) - О для выделения участка стационарности процесса, по программе статической обработки случайного процесса получают его частотный спектр, по которому определяют частоту второго максимума в области частот 12-18 1/с.
Обработка данньгх производится микропроцессором и в оперативной памяти, где по частоте S характерного (например, второго) максимума вычисляют вес груза, перемещаемого ковшом экскаватора по эксперименталь но установленной зависимости
m R|
где m - вес перемещаемого груза/
р - частота второго максимума
частотного спектра R - согласующий коэффициент,полученный экспериментально.
Установлено, что R принимает значения 0,41666, 0,42857; 0,44047; 0,44642 в зависимости от удельного веса загружаемой породы, частота 16,8 1/с, в соответствии с этим получают вес загружаемой массы 7- 7,5 т.
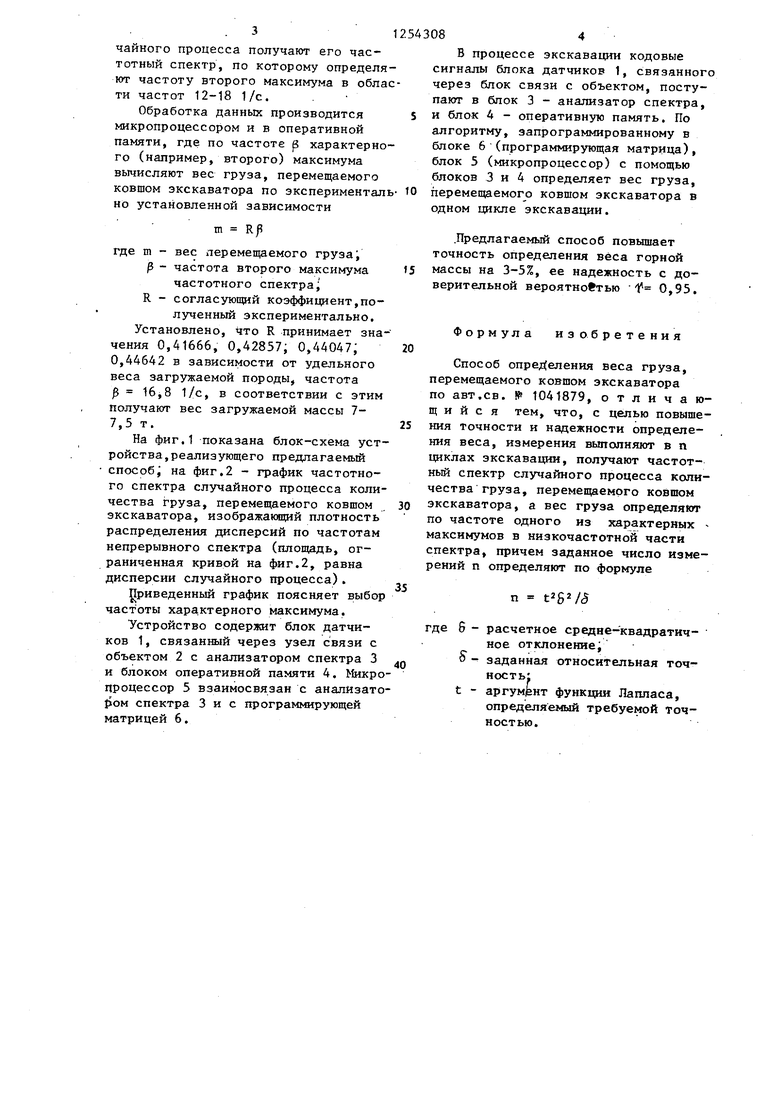
На фиг.1 показана блок-схема устройства, реализующего предлагаемый способ; на фиг.2 - график частотного спектра случайного процесса количества груза, перемещаемого ковшом , экскаватора, изображаюпщй плотность распределения дисперсий по частотам непрерывного спектра (площадь, ограниченная кривой на фиг.2, равна дисперсии случайного процесса).
Приведенный график поясняет выбор частоты хара,ктерного максимума.
Устройство содержит блок датчиков 1, связанный через узел связи с объектом 2 с анализатором спектра 3 и блоком оперативной памяти 4. Микро Процессор 5 взаимосвязан с аналИзато {ioM спектра 3 и с программирующей матрицей 6.
В процессе экскавации кодовые сигналы блока датчиков 1, связанног через блок связи с объектом, поступают в блок 3 - анализатор спектра, и блок 4 - оперативную память. По алгоритму, запрограммированному в блоке 6 (программирующая матрица), блок 5 (микропроцессор) с помощью блоков 3 и 4 определяет вес груза, перемещаемого ковшом экскаватора в одном цикле экскавации.
.Предлагаемый способ повышает точность определения веса горной массы на 3-5%, ее надежность с доверительной вероятностью 1 0,95.
Формула изобретения
Способ определения веса груза, перемещаемого экскаватора по авт.св. № 1041879, отличающийся тем, что, с целью повышения точности и надежности определения веса, измерения выполняют в п циклах экскавации, получают частотный спектр случайного процесса количества груза, перемещаемого ковшом экскаватора, а вес груза определяют по частоте одного из характерных максимумов в низкочастотной части спектра, причем заданное число измерений п определяют по формуле
п
где 6 - расчетное среяне-квадратичное отклонение;
о - заданная относительная точность:
t - аргумент функции Лапласа, определяемый требуемой точностью.
Sno М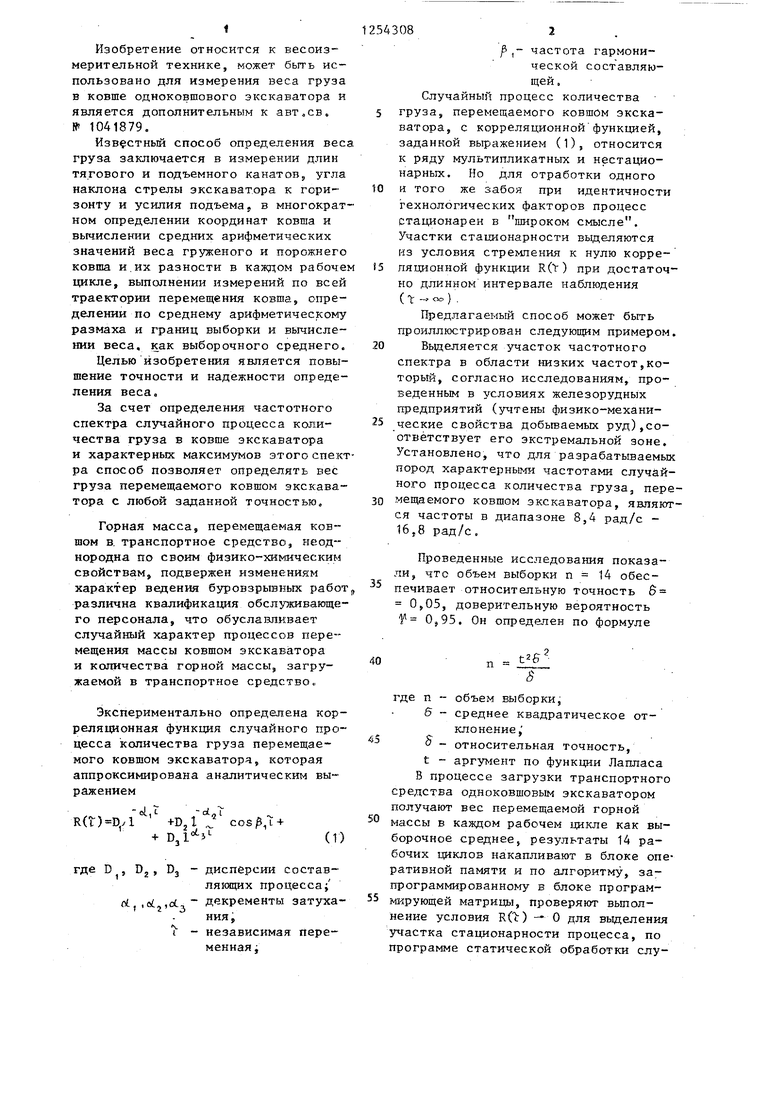
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения веса груза,перемещаемого ковшом экскаватора | 1982 |
|
SU1041879A1 |
| Устройство для взвешивания груза в автосамосвале | 1984 |
|
SU1190203A1 |
| Способ определения массы ковша экскаватора-драглайна | 1978 |
|
SU861485A1 |
| Устройство для взвешивания | 1976 |
|
SU678328A2 |
| Устройство для измерения веса содержимого ковша одноковшового экскаватора | 1974 |
|
SU563458A2 |
| Одноковшовый экскаватор | 1980 |
|
SU994632A2 |
| Рабочее оборудование экскаватора | 1976 |
|
SU721508A1 |
| Устройство для контроля работы экскаватора | 1973 |
|
SU540990A1 |
| Рабочее оборудование гидравлического экскаватора | 1982 |
|
SU1081291A1 |
| Рабочее оборудование гидравлического экскаватора | 1979 |
|
SU870597A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность, и надежность определения веса. В процессе экскаващш кодовые сигналы блока 1 датчиков, связанного через узел 2 связи с объектом, поступают в анализатор 3 спектра и блок 4 оперативной памяти. По алгоритму, запрограммированному в программирующей матрице 6 микропроцессор 5 с помощью ана лизатора 3 и блока 4 оператив- . ной памяти определяет вес груза, перемещаемого ковшом экскаватора в одном цикле экскавации. Число измерений определяется по приведенной математической формуле. Изобретение дополнительное к основному авт.св. 1041879. 2 илл. о i9 (Л 00 о 00 Фиг.1
Редактор А. Гулько
Составитель П. Карманов
Техред MiXoAaHKM Корректор М. Шароши
Заказ 4710/44 Тираж 705 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое гфедприятие, г. Ужгород, ул. Проектная,4
| Способ определения веса груза,перемещаемого ковшом экскаватора | 1982 |
|
SU1041879A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
