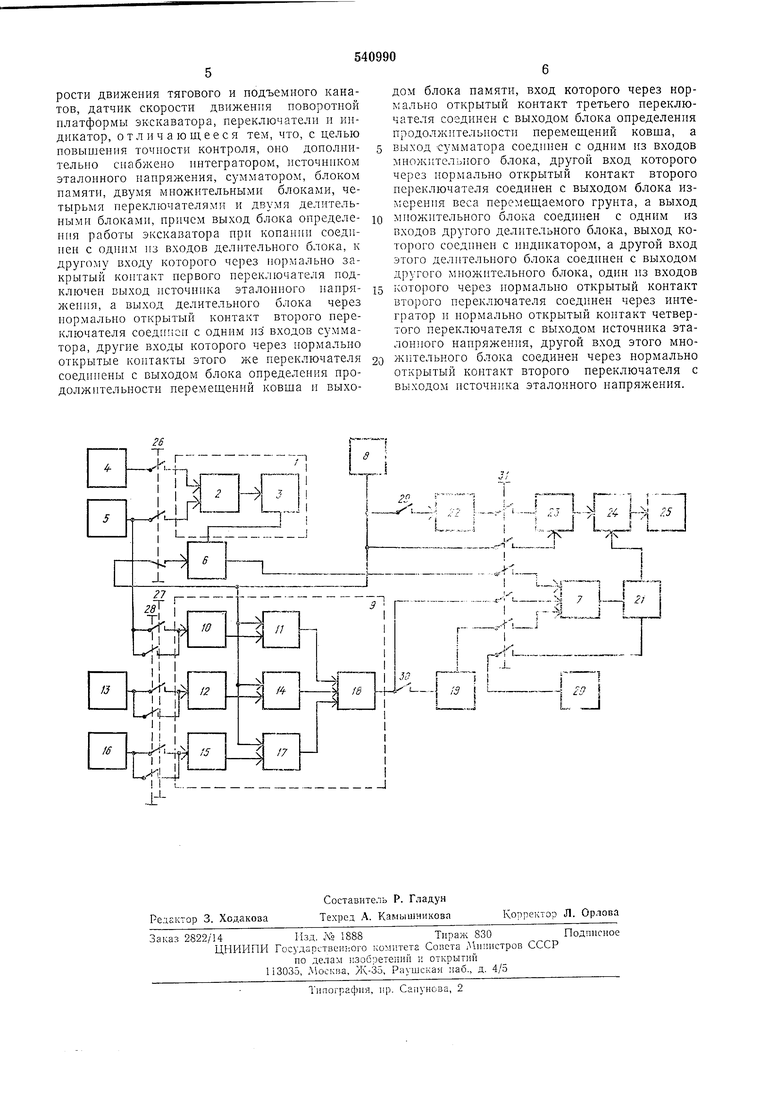
экскаватора при копании, включающий миожительиый блок 2, иа выход которого подключен интегратор 3, а к входам - датчик 4 усилия в тяговом каиате и датчик 5 скорости тягового каната. Выход блока 1 соедииен с одиим из входов делительного блока 6, выход которого соедииеи с сумматором 7, а другой вход -с источииком 8 эталонного иаиряжсния. Блок 9 определения продолжительности иеремещений ковша состоит из интегратора 10, вход которого подключен к выходу датчика 5 скорости тягового каната, а выход - к входу сумматора И; другого интегратора 12, вход которого иодключен к выходу датчика 13 скорости иодъемного каната, а выход - к входу сумматора 14; третьего интегратора 15, вход которого иодключен к выходу датчика 16 скорости движения поворотной платформы экскаватора, а выход - к входу сумматора 17, другие входы сумматоров подключены к источнику 8 эталонного напряжения; и блока 18 выделения максимума, на входы которого иодключены выходы сумматоров 11, 14 и 17. Выход блока 18 подключен к входу блока 19 памяти и к одному из входов сумматора 7, к другому входу которого иодключен выход блока 19 памяти. Выход блока 20 измерения веса иеремеш,аемого грунта иодключеи к входу миол ительного блока 21, к другому входу которого подключен выход сумматора 7. Иптегратор 22 иодключен входом к источи1И у 8 эталонного напряжения, а выходом - к одному из входов миожительиого блока 23, другой вход которого подключен к источнику 8 эталонного иаиряження, а выход - к входу делительного блока 24, к другому входу которого подключен выход множительного блока 21. Выход делнтельного блока 24 подключен к входу индикатора 25.
Датчики 4, 5 и источник 8 соединены с блоками 2 и 6 через контакты переключателя .26. Интеграторы 10, 12 и 15 соедииены с датчиками 5, 13 и 16 через контакты переключателей 27 н 28. Источннк 8 соединен с интегратором 22 через контакт переключателя 29, а блок 18 с блоком 19 - через контакт переключателя .30. Сумматор 7, блоки 21 и 23 соединены с блоками 6, 18, 19, 20, источником 8 н ннтегратором 22 через контакты переключателя 31.
Работа устройства.
В начале операцпи копаиия по внешней команде замыкаются нормально открытые и размыкаются иормально закрытые контакты переключателя 26 и замыкается контакт переключателя 29. При этом иа вход миожнтельпого блока 2 поступают сигпалы, пропорциональные усилию н скорости движения тягового каната. Сигнал на выходе множительного блока, пропорциональный мгновенному значению мощности, после интегрирования .подается на вход делительного блока 6.
В конце копания и начале трансиортнровапия ковша на разгрузку по внешней команде размыкаются нормально открытые и замыкаются нормально закрытые контакты иереключателя 26 н замыкаются контакты переключателя 27. Тогда выходы датчиков 4 и 5 отключаются от блока 2, а вход делитсльиого блока 6 иодключается к источнику 8 эталонного на5 иряжеиия. Делительный блок осуществляет деление на постояииое число, ироиорциоиальное эталонной мощности иривода касающего механизма, и на его выходе получается снгиал, иропорниопальный эффективному времени конания. Одиовременно через замкнутые
0 контакты иереключателя 27 иа входы интеграторов 10, 12 и 15 иодаются сигналы от датчнкон 5, 13 н 16. Выходные сигналы интеграторов 10, 12 н 15, ироиорциоиальиые ирираще5ииям длин канатов подъема, тяги и угла поворота экскаватора, поступают на входы сумматоров 11, 14 и 17, на другне входы которых одновременно поступают сигналы с источника 8 эталоиного иапряжепия. Сигналы с сумма0торов 11, 14 и 17, пропорциональные минимальным длительиостям операций трех главных нрнводов экскаватора, поступают иа вход блока 18 выделения максимума, который выделяя максимальный снгнал, определяет лимитирующий нрнвод в данной операции.
ilo окоичанни оиерацин транспортировки копша н началу его возвращения в забой по BHCHirieii команде размыкаются контакты нереключателя 27 п замыкаются контакты пере0ключателей 28 и 30, причем иоследиий срабатывает только на время, необходимое для запоминания сигнала, ироиорцноиальиого эффективному времени перепоса ковша в отвал, поступающего с выхода блока 18 на вход бло5ка 19 памяти. В конце этого цикла на выходе блока 18 формируется сигнал, нронорциональный эффективному временн возвращения ковша Б забой.
По окоичанни цикла по внешней команде размыкаются контакты переключателей 28, 29
0 п замыкаются на определенный порядок времени коитакты переключателя 31. При этом иа выходе интегратора 22 устанавливается сигиал, нроиорциональный времени цикла, ко5горый иеремиожается в блоке 23 на сигнал, и ;онорциональный эффектнвно.му весу грунта. Па выходе сумматора 7 получается сигиал, пропорциональный эффективному времени выполнения цикла, который иеремиожается в
0 блоке 21 с сигналом, пропорциональным весу rpyirra, перемещаемого за цикл. Выходные сгпналы множнтельных блоков 21 и 23 подаются на входы делительного блока 24, выходной сигнал юторого, пропорцнональный оценке эффективности работы экскаватора, поступает на пидикатор 25.
Формула изобретения
0 Устройство для контроля работы экскаватора, включающее блок определения продолжительности перемещеннй ковша, блок определення работы экскаватора при копании блок измерения веса перемещаемого грунта
датчик усилия в тяговом канате, датчики скорости движения тягового и подъемного канатов, датчик скорости движения поворотной платформы экскаватора, переключатели и индикатор, отличающееся тем, что, с целью повышения точности контроля, оно дополнительно снабжено интегратором, источником эталонного напряжения, сумматором, блоком памяти, двумя множительными блоками, четырьмя переключателями и двумя делительными блоками, причем выход блока определения работы экскаватора ири копаиии соединен с одним из входов делительного блока, к другому входу которого через нормально закрытый контакт первого переключателя подключен выход источника эталонного иаиряжеиия, а выход делительного блока через нормально открытый контакт второго переключателя соедпг си с одним из входов сумматора, другие входы которого через нормальио открытые контакты этого же переключателя соединены с выходом блока определения продолжительности перемещений ковила и выходом блока памяти, вход которого через нормально открытый контакт третьего переключателя соединен с выходом блока определения продолжительиости перемещений ковша, а 5 выход сумматора соединен с одним из входов множительного блока, другой вход которого через нормально открытый контакт второго переключателя соединен с выходом блока измерения веса перемещаемого грунта, а выход
0 множительного блока соединен с одним из входов другого делительного блока, выход которого соединен с индикатором, а другой вход этого делительного блока соединен с выходом другого множительного блока, один пз входов
5 которого через пормально открытый контакт второго переключателя соединен через интегратор и нормально открытый контакт четвертого переключателя с выходом источника эталонного напряжения, другой вход этого множительного блока соединен через нормально открытый контакт второго переключателя с выходом источника эталонного напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля эффективности управления процессом копания экскаватора | 1973 |
|
SU502100A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| Устройство для контроля эффективности управления процессом копания экскаватора | 1986 |
|
SU1320351A1 |
| Устройство автоматического управления процессом копания драглайна | 1982 |
|
SU1063950A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Устройство для управления рабочим оборудованием экскаватора-драглайна | 1985 |
|
SU1313962A2 |
| Устройство для регулирования межклетевых натяжений | 1984 |
|
SU1174112A1 |
