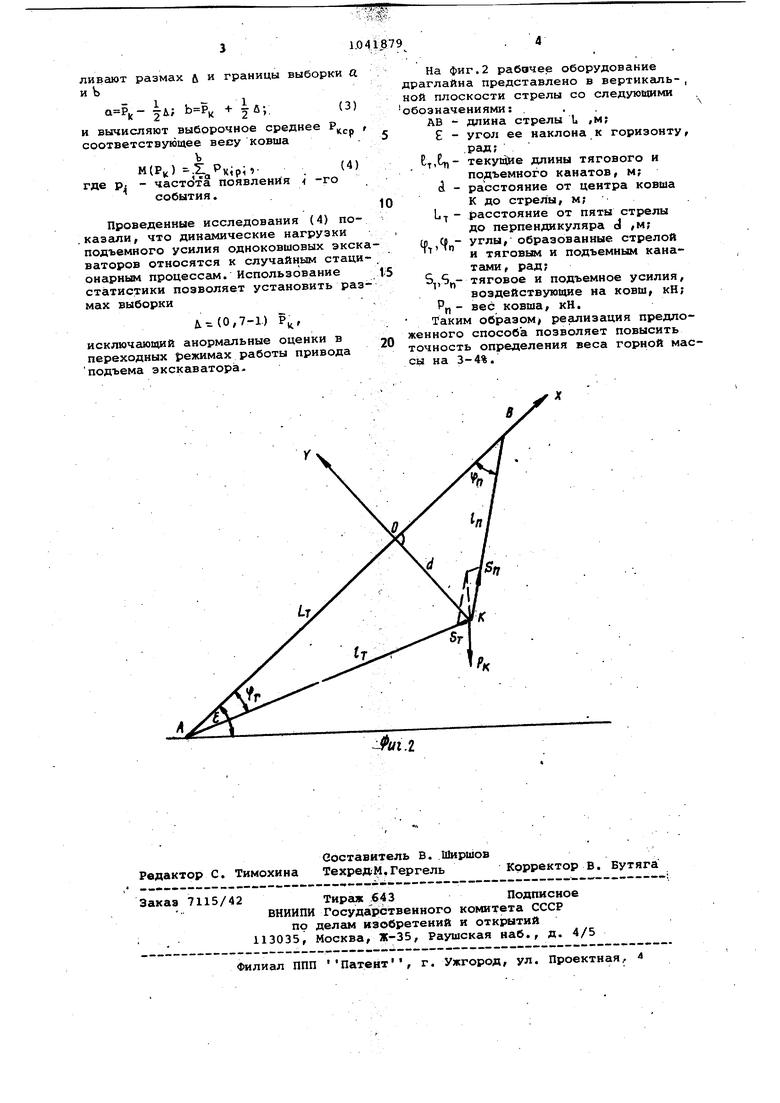
Изобретение относится к весоизме рительной технике, в частности к способам измерения веса груза в ков ше одноковшового экскаватора. Известен способ определения веса ковша экскаватора-драглайна по величине усилий в тяговом и подъемном канатах с учетом координат ковша в пространстве. Этот способ основан на измерении усилий в момент пересечения траекто рий ковша расчетной кривой в вертиКальной плоскости стрелы с заранее заданной координатной зависимостью Эта кривая подобрана таким образом, что вероятность пересечения ее ковшом равна единице l , Однако в этом способе случайная оставляющая погрешности измерения очень высока, так как зависит от ве личины угла встречи траектории ;с расчетной кривой и,не защищена от воздействия всякого рода динамических помех. Наиболее близким к изобретению является.способ определения веса гр за, перемещаемого ковшом экскаватора, заключаю11.1ийся в измерении длин тягового и подъемного канатов, угла наклона стрелы экскаватора к горизонту и усилия подъема, в многократ ном определении координат ковша и вычислении средних арифметических значений веса груженого и порожнего ковша и их разности в каждом цикле экскавации 2 Этот способ обладает двуМя сущес венными недостатками: . измерение осуществляется не по жеей траектории ковша, а только в той ее части, где она близка к расчетной кривой, причем вероятность их совмещения не равна единице, отсаада появляется погрешность измеренияусреднение результатов многократ ного измерения подъемного усилия, ограниченных постоянными пороговыми значениями, привносит дополнительну ошибку, возникающую вследствие неравномерного заполнения ковша. Цельк изобретения является повышение точности за счет выполнения измерений по всей траектории движен ковша. Поставленная цель достигается тем, чтз согласно способу определеНИН веса груза,, перемещаемого ковшо экскаватора, заключающемуся в измерении длин тягового и подъемного ка натов, угла наклона стрелы экскаватора к горизонту и усилия подъема, в многократном определении координа ковша и вычислении средних арифметичеЬких значений веса груженого и порожнего ковша и их разности в каж дом цикле экскавации, полученные .по всей траектории .перемещения ковша результаты вводят по заданным уровням в оперативную память, и по окончании измерений по среднему арифме- , тическому определяют размах и границы выборки, в соответствии с которыми вычисляют вес как выборочное среднее, причем единичные результаты веса определяют по формуле ) (1) П4 и длина свисающей части подъемного каната подъемное усилие м, кН; L ,ч- длина и угол наклона стрелы, м, рад; cJ; ,LT« координаты ковша в вертикальной плоскости стрелы, м; вес ковша с учетом вертикальной динамической составляющей подъ-. емного усилия, кН; -Ч - номер измерения. Полученные по всей траектории перемешения ковша результаты регисхрируюх по заданнь1м уровням с помощью запоминающего устройства, по известному алгоритму находят среднее арифметическое, устанавливают допустимые границы выборки и определяют выборочное среднее веса ковша. На фиг.1 изображена блок-схема устройства, реализующего предлагаемый способ; на фиг.2 - график, поясняющий формулу. Устройство содержит блок датчиков 1, связанный через узел связи с объектом 2 с блоком 3 оперативной памяти. Микропроцессор 4 взаимосвязан с блоком 3 и с блоком 5 программирующая матрица. В процессе работы экскаватора при перемещении груженого и порожнего ковша кодовые сигналы с датчиков длин подъемного t( и тягового PTI канатов, угла наклона стрелы , и подъемного усилия S блока датчиков 1 вводят в блок 3 оперативной памяти и по алгоритму, запрограммированному в блоке 5, периодически с помощью блоков 3 и 4 производят вычисления значений Р„; . - .-..- Значение величины Р равняется весу (груженого и порожнего) ковша плюс динамическая составляющая Рдиц подъемного усилия 5 , направленная вертикально, а именно k Рдинл После каждого вычисления полученые данные Р вводят в блок 3 опеативной памяти по заданным y)pJpвням, по окончании измерений по другой рограмме блока 5 вычисляют среднее рифметическое Р, по нему устанавливают размах & и границы выборки и Ъ + f и;. ( L; Ъ и вычисляют выборочное среднее Р соответствующее весу ковша М(Р) -Z. где Р - частота появления события. Проведенные исследования (4) по казали, что динамические нагрузки подъемного усилия одноковшовых эк ваторов относятся к случайным стац онарным npouecceusi. Использование статистики позволяет установить р мах выборки lix(0,7-l.) Р, исключающий анормальные оценки в переходных режимах работы привода подъема экскаватораНа фиг.2 рабочее оборудование аглайна представлено в вертикгшь-, й плоскости стрелы со следующими означениями: ... ЛВ - длина стрелы L ,м; - угол ее наклона к горизонту, .рад; Ст,ц,- текущие длины тягового и по,цъемного канатов, м; расстояние от центра ковша К до стрелы, м; Lf - расстояние от пяты стрелы до перпендикуляра d ,м; (р ,9п углы, образованные стрелой и тяговым и подъемным канатами, рад; S,Sj,- тяговое и подъемное усилия, воздействующие на ковш, кН; вес ковша, кН. Таким образом реализация предлонного способа позволяет повысить чность определения веса горной масна 3-4%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения веса груза,перемещаемого ковшом экскаватора | 1984 |
|
SU1254308A2 |
| Способ определения массы ковша экскаватора-драглайна | 1978 |
|
SU861485A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186909C1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА, ПЕРЕМЕЩАЕМО ГО КОВШОМ ЭКСКАВАТОР А,. закл1Ьчающийся в измерений длин тягового и подъемного канатов, угла наклона стрелы экскаватора к горизонту и усилия подъема, в многократном определении координат ковша и вычис- , лении средних арифметических зна- , чений веса груженого и порожнего ковша и их разности в каждом рабочем цикле, отличающийся xeMi что, с целью повышения точности за счет выполнения измерений по всей траектории движения ковша, полученные по всей траектории перемещения ковша результаты вводят по данным уровням в оперативную память, а по окончании измерений по среднему арифметическому определяют размах и границы выборки, в соответствии с которыми вычисляют вес как выборочное среднее, причем единичные результаты .веса определяют по формуле Sn.L Р.; й„,(,) , 5„ - длина подъемного канагде t, i та и подъемное усилие, м, кН; (Л L ,Е - Длина стрелы и угол ее наклона, м, рад; LT,, декартовы координаты ковша в вертикальной плоскости стрелы, м; р«;вес ковша с учетом вер тикальной динамической составляющей подъемного усилия, кН; i - номер измерения. эо ;о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР | |||
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ЗАГРУЗКИ КОВША ЭКСКАВАТОРА | 0 |
|
SU309098A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
