входу блока преобразования сигнала скорости основного привода, второй вход которого подключен к выходу блока эталонного сигнала, а выход блока преобразования сигнала скорости основного привода через блок модифика-- ции сигнала скорости подключен к бло ку сигнала превьшёния скорости, первому входу первого суммирующего устройства и через блок фиксации сигнала к первому входу блока управления движением вперед, при этом датчик скорости дополнительного привода подключен к первому входу блока преобразования сигнала скорости дополнительного привода, второй вход которого под1шючен1 к выходу блока эта- .лонного сигнала, а выход блока преобразования сигнала скорости допел- нительного привода подключен к второму входу первого суммирующего устройства, выход которого через сервоусилитель подключен к первому входу сервофильтра, второй вход которого соединен с первым выходом блока задержки сигнала, второй выход которого соединен с блоком сигнала превышения скорости, а первый и второй входы блока задержки соединены соответственно с первым выходом блока сигнала превышения скорости и с первыми входами блоков управления движением вперед и назад, выход серво1
Изо бретение относится к электронной системе управления для автомобиля с основным приводом для ведущих колес и с дополнительным приводом для других ведущих колес, в частности для автомобиля с двумя узлами, соединенными друг с другом шарни|)но и связанными соответственно с основным приводом или же с допол1штельным приводом.
Цель изобретения - повьшение надежности работы.
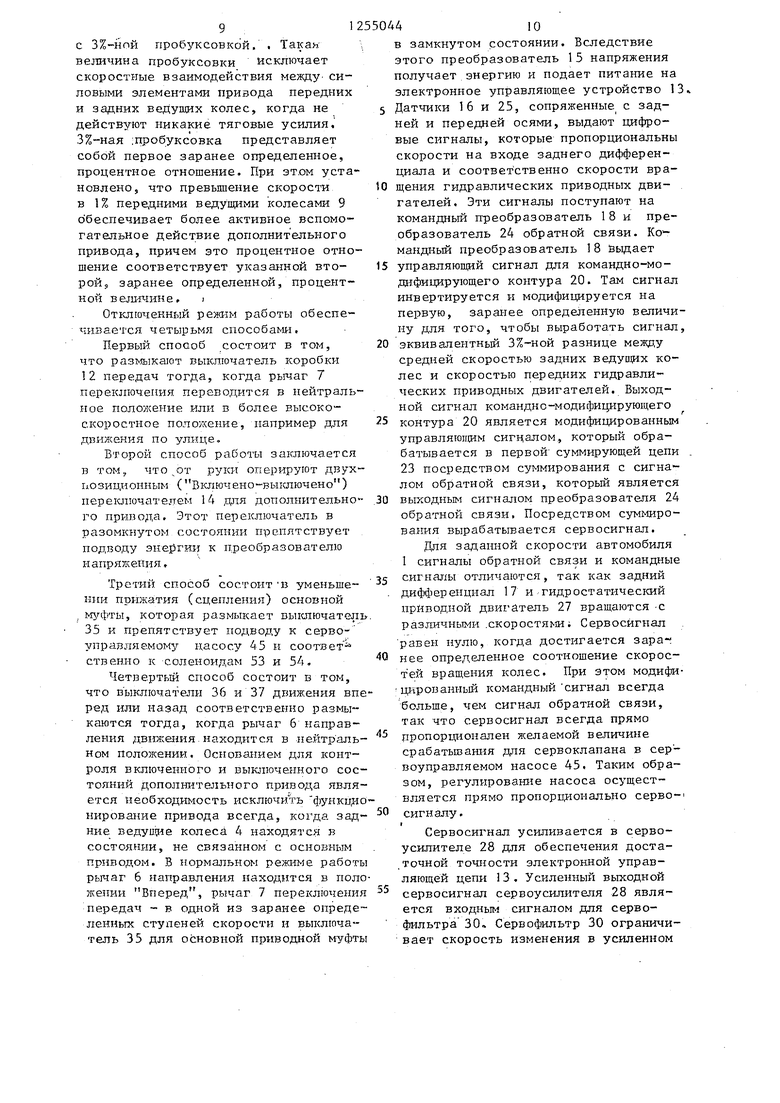
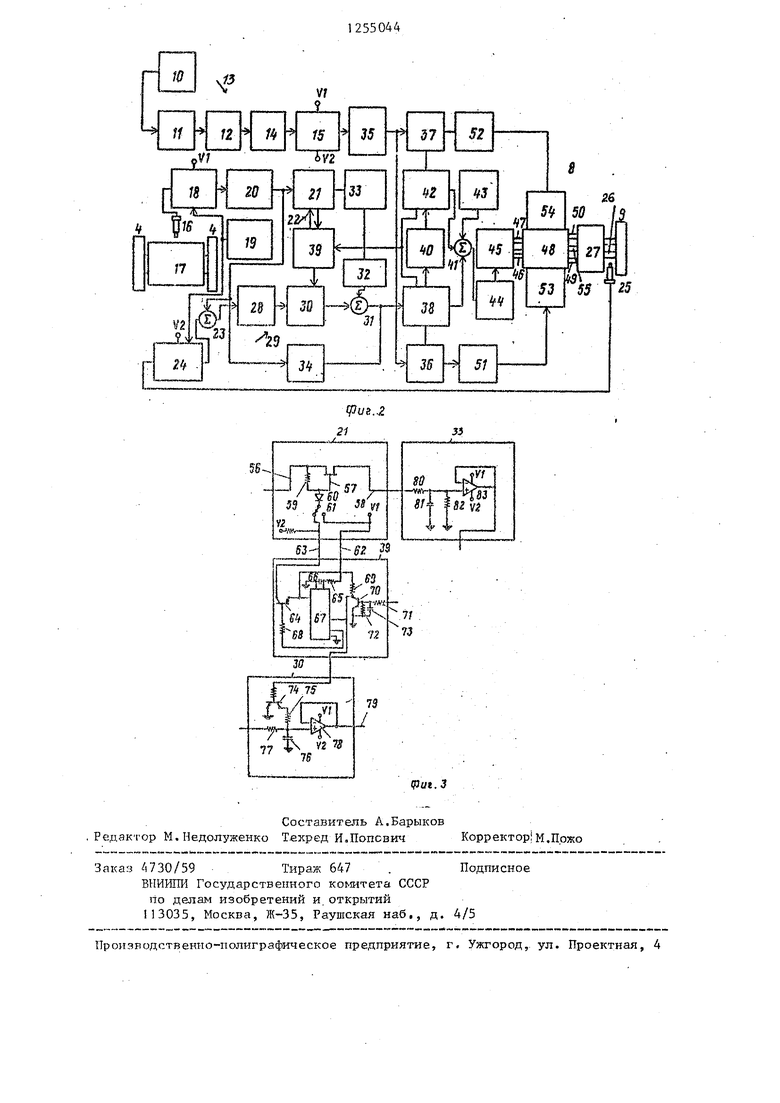
На фиг.1 показан строительный грузовой автомобиль, общий вид; на vJ)Hr.2 - блок-схема электронной управляющей цепи; на фиг.З - электрическая схема блока задержки сигнала.
55044
фильтра соединен с первым входом второго суммирующего устройства, второй вход которого соединен с выходом модификатора сигнала превышения скорости, вход которого через фильтр сигнала превышения скорости соединен с вторым вькоДом блока сигнала превьщ1ения скорости, выход второго суммирующего устройства подключен к первому входу бло15а управления движением вперед, который через инвертор подключен к блоку управления движением назад, причем вторые выходы блоков управления движением вперед и назад подключены соответственно к выключателям движения вперед и назад, а третьи,выходы блоков управления движением вперед и назад подютючены соответственно к первому и второму входам третьего суммирующего устройства, третий вход которого подключен к вибрационному генератору, а выход третьего суммирующего устройства под1шючен через сер- воклапан управления источником давления рабочей жидкости к источнику давления рабочей жидкости,
2.Система по п, 1, о т л и ч а ю щ а я с я тем, что блок задержки сигнала снабжен мультивибратором.
3.Система поп.1, отлич аю щ а я с я тем, что блок задержки сигнала снабжен транзистором.
На фиг.1 показан автомЬбиль 1 вместе со служащим в качестве основного привода двигателем 2 в гутренне- го сгорания, который приводит в дейт ствие гидравлический насос .3 . Двигатель внутреннего сгорания, кроме того, приводит в действие через дифференциал заднего моста задний комплект ведущих колес 4 и загружаемую гидравлически обычную силовую коробку передач 5. Силовая .коробка пере- .цач 5 управляется при помощи рычага ,6 поворота (направления, реверса), рычага 7 переключения передач и муфты основного привода 8, которые расположены на пульте управления кабины водителя. Рычаг 6 имеет возможность перемещения между положениями: движение вперед, нейтральное и движение назад. Рычаг 7 переключения передач может переключаться из нейтрального положения через восемь ступеней, определяющих приводные соотношения.
Автомобиль 1 снабжен дополнительным приводом для передних колес (все
10вместе обозначены цифрой 8), который, преобразующий контур 18 подкпючен к
25
30
служит для привода двух передних колес 9.
На фиг.2 показана,автомобильная аккумуляторная батарея 10, которая может быть соединена с электрической
системой автомобиля через выключатель зажигания 11, управляемый при помощи ключа, Дг1я того чтобы управлять дополнит ельным приводом 8 для передних колес, выключатель зажигания 11 может соединиться с переключателем передач, которьп является- частью электронного управляющего устройства. Переключатель 12 передач размыкается или замыкается в зависимости от перемеп ения рычага 7 переключения передач с тем, чтобы ограничить функции электронной управляющей цепи 13 заранее определенными нижними передачами. Переключатель 12 передач соединен с двухпозицион- ныхМ (Включено-выкгшчено) выключателем 14, приводимым в действие вруч ную, Быютючатель 14 подключен к обыч ному преобразователю 15 напряжения, который преобразует напряжение источника питания в напряжения, которые могут быть использованы другими элементами в электронном управляющем устройстве
Одним из элементов, которые используют напряжения, вырабатьгоаемые преобразователем 15, является датчик 16 заднего моста, который измеряет- скорость на входе ди4 41еренциала зад- 45 него моста 17, с тем чтобы выдавать сигнал, которыйсовпадает со средней скоростью ведущего колеса задних колес 4, а именно перед- началом действия дифференциала. Датчик 16 яв- - 50 яется цифровым магнитным датчиком, которьш выдает цифровой импульс -с постоянной амплитудой, однако с частотой, которая пропорциональна скоости или числу оборотов. Цифровые 55 мпульсы в меньщей степени подвержеы влиянию со стороны частотных электрических помех, когда сигнал должен
35
быть передан по длинным соедлнитель- Нь1м линиямt
Датчик 16 подключен к преобразователю частоты в напряжение, который на фиг,2 показан как командно-преоб- разуюЕций контур 18, В качестве эталонной величины служит сигнал от стабилизированнего кварцем эталонного (опорного) контура 19. Команднопреобразующий контур 18 подкпючен к
20
5
0
0
командно-модифицирующему контуру 20, который инвертирз ет входные сигналы и модифнциру| 5т их в заранее определенном первом процентном отношении. Kpмaнднo-мoдифищipyющий контур 20 - : подключен к селектору 2i. превьш1ения скорости в цепи 22 превышения скорости. Командно-модифицирующий контур 20 под1шючен, кроме того, к первой суммирующей цепи 23.
Первая суммирующая цепь 23 соединена также с преобразователем частоты в напряжение, который обозначен как преобразователь 24 обратной связи и к которому в качестве эталонной величины подводится такой лее сигнал от. эталонного (опорного) контура 19 Цепь преобразователя 24 обратной связи соединена с передним дополнительным приводом-датчиком 25, который представляет собой такой же цифровой магнитный датчик, как и датчик 16.
Датчик 25 функционально сопряжен с дополнительным приводом 8 и воспринимает скорость вращения ротора 26 одного из гидравлических приводных двигателей 27, причем каждый такой ,дви1 атель сопряжен с одним из передних колес 9. Один из двух роторов 26 не обязательно должен вращаться .с такой же скоростью, что и переднее колесо 9, так как в случае необходимости KOjieco может быть соединено с гидравлическим двигателем через муфту, включаемую под давлением.
Первая суг-мирующая цепь 23 подключена к сервоусилителю 28 в серво- цепи 29. Сервоусилитель 28 для усиления выходных сигналов первой суммирующей цепи 23. Сервоусилитель 28 соединен с сервофиль-гром 30. Последний регулирует скорость изменения выходных сигналов сервоусилителя 28 до первой заранее определенной скорости изменения. Сервофильтр 30 соединен со второй cy пipyющeй цепью 31 , которая подключена к модг-1фикато- ру 32 превышения скорости в цепи 22
5
превьшения скорости. Модификатор 32 модифицирует входные сигналы в заранее определенном процентном отношении которое эквивалентно разности скоростей, с которой скорость передних ко- лес 9 превьшает скорость задних колес 4 на вторую заранее определенную процентную величину. Модификатор 32 превышения скорости подключен к фильру 33 превьшения скорости, который регулирует скорость изменения сигналов от селектора 21 превышения скорости до заданного определенного значения скорости для возрастающих сигналов и до третьей заранее опреде- ленной скорости для убывающих сигналов.
Выходной сигнал второй суммирую- щей цепи 31 модифицируется вследствие того, что выходной сигнал пере дается к фиксаторной цепи (цепи привязки уровня) 34, принимающей сигналы от командно-модифицирующего контура 20 и селектора 21 превышения скорости, между, которыми расположе- на цепь 34. .
К преобразователю 15 напряжения подключен выключатель 35 ходовой муфты основного привода. Выключатель 35 -расположен на напорном кла- пане муфты коробки передач (не пока- 3ajio) и размыкается каждый раз, когда снижается давление в муфте основного привода 8, Выключатель 35 в свою очередь подключен к связанные с движением вперед и назад выключателями 36 и 37 соответственно, которые управляются при помощи рычага 6 направления движения и замьжаются в зависимости от того, в какое поло- жение (вперед или назад) он перемещается.
Выключатель 36 движения вперед под1шючен к цепи 38 управления движением .вперед, которая воспринимает входной сигнал от второй суммирующей цепи 31, Цепь 38 управления дви жегшем вперёд кроме того, подкпюче на к блокир-ующей цепи 39 в цепи 22 превь1шещ1Я скорости, а также к обыч ному инвертору 40 и к третьей сум- . мирующей цепи 41, Инвертор 40 соединен с цепью 42 управления движением назад, которая соединена с выключателем 37, реагирующим на дви- жение назад.
Цепи управления 38 и 42 движения вперед и назад подключал к третьей
0 5
0 5
0 5 0
5
5
суммирующей цепи 41. Их выходные сигналы суммируются с колебательным с гналом .вибрационного генератора 43, выдающим управляющий сигнал напряжения на преобразователь тока, который изображен в виде выходной цепи 44. Последняя приводит в действие сервоклапан, который управляет смещением гидравлического насоса 3. Это усд ройство обозначено в виде сервоуправляемого насоса 45.
Насос 45 в зависимости от положительных или отрицательных токовых сигналов из выходной цепи 44 обеспечивает рабочей жидкостью соответствующие трубопроводы 46 и 47 движе- .ния назад. Напорные трубопроводы 46 и 47 соединены с гидравлической системой 48, которая включает та кие дополнительные компоненты, как делитель потока, разгрузочный, маятни- ковьш (центробежный), соленоидный клапаны и т.п. Напорные трубопрово- ды 49 и движения, вперед-и 50 движения назад, приводят в.действие гидростатические приводные двигатели 22, Делитель потока .(на чертеже не показан) допускает частичное действие дифференциала между обоими передними ведущими колесами 9 и, кроме того, осуществляет блокировку .ди4)ферени;иала, так что момент вращения передается обоим приводам переднего колеса 9, если одно колесо имеет чрезмерное проскальзывание по отношению к другому.
Выключатели 36 и 37 сопоставлены с движением вперед и назад, соединены в случае необходимости с мембранными вы1шючателями 51 и 52, которые реагируют на гидравлически моделируемое давление в силовой коробке 5 передач. При этом задние колеса после переключения коробки передач в положение движения вперед или назад, опять начинают вращаться.под действием основного привода. ВыкЛю- чатели 51 и 52, сопоставленные с
, движением вперед и назад, сопряже- . ны с соленоидами 53, и 54 гидравлической систе№1 48. Солейоиды 53 и
. 54 служат для передачи приводного (рабочего) давления в напорных трубопроводах 46 или 47 к напорным трубопроводам 55 (показан лишь один) для вспомогательных муфт 27, вследствие чего последние соединяют pOTOpi
26 гидравлического двигателя с передним колесом 9.
Если приведенные в действие передние колеса 9 вращаются быстрее, чем гидравлические приводные двигатели, то двигатели мгновенно приводятся в действие от ведущих колес 9 через муфты. Это приводит к нию давления в тех трубопроводах, которые подводят давление к приводным двигателям. Вследствие падения давления в гидравлических приводных двигателях уменьшается давление, удерживающее муфты во включенном положении, так что вспомогательные муфты окончательно расцепляются. Когда передние ведущие колеса 9 вращаются быстрее, чем гидравлические приводные двигатели, вспомогательные муфты вращаются с минимальным сцепляющим давлением (усилием), благодаря чему передние ведущие колеса 9 могут без большого сопротивления :обгонять гидравлические приводные двигатели 27. На фиг.З показан селектор 21 превышения скорости., фильтр 33 превышения скорости, блокирующая цепь 39 и цепь сервофильтра 3 Питающие напрялсения от преобразователя I5 рассматриваются как V и V при условии, что V( больше, чемУ
Селектор 21 превышения скорости имеет входную линию 56, которая через транзистор 57 подключена к выходной линии 58. Входная линия 56, кро- ме того, через резистор 59 соединена с линией управляющего входа транзистора 57 и с диодом 60, Диод 60 соединен через приводимый в действие от руки селективньй выключатель 61 превьшения скорости, с напряжением V через резистор в положении Выключено или с напряжением V, в положении Включено. Напряжение V, и резистор 61 с помощью проводников 62 и 63 подключены к эмиттеру и, соответственно, к коллектору р-п-р- транзистора 64 в блокирующей цепи 39 Проводник 62 через резистор 65 и конденсатор 66 заземлен.
Блокирующая цепь 39 имеет мультивибратор 67 с одним устойчивым состоянием, выходной проводник которого соединен с базой транзистора 64 чере резистор 68. Времязадаюший вход рас- положен между резистором 65 и конденсатором 66, в то время как другой вход соединен с землей. Управ
. .
1253( 1Л/,3
ляю1Щ Й ВХОД мультивибратора 67 подключен к проводнику 62, который через резистор 69 соединен с напряже20
25
.
35
5
10
ts
30
40
5
0
ни ем V . Другим соедин ением является соединение с коллектором п-р-п-тран- зистора 70. База зтого транзистора через резистор 71 связана с обоими цепями управления движения вперед и назад. База транзистора 70 заземлена через резистор 72 и конденсатор 73. Эмиттер зтого транзистора подключен непосредственно к земле.
Проводник 62, кроме того, подключен к базе п-р-п-транзис1Ора в цепи сервофильтра 30. Эмиттер этого транзистора заземлен, в то время как коллектор через резистор 75 соединен с конденсатором 76 сервофильтра. Входной резистор 77 включен между резистором 75 и конденсатором 76, а также соединен со входом операционного усилителя 78. Выходной сигнал усилителя 78 прикладывает напряжение К проводнику 79, который соединен со второй суммирующей цепью 3.
Выходной, проводник 58 селектора 21 превьш1ения скорости соединен с резистором 80 в цепи фильтра превышения скорости 33. Резистор 80 через конденсатор 81 и резистор 82, которые включены параллельно по отноше- нию друг к Другу, заземлен. Резистор 80 соединен со входом 83, выход которого через проводник соединен с модифицирующей цепью превьшения скорости 32.
Система работает следующим образом.
Дополнительный привод имеет три
режима работы: первый - работа в отключенном состоянии, при котором передние ведущие колеса 9 свободны и вращаются без участия привода; второй - при котором передние ведущие колеса 9 не приводятся во вращение и могут вращаться свободно лишь до тех пор, пока задние ведущие колеса 4 имеют пробуксовку до (менее) заранее определенной процентной величины; третий - работа с превьшгением скорости, при котором передние ведугцие колеса 9 постоянно вращаются благодаря приводным двигателям 27 с тем, чтобы вращаться на заранее определенную вторую процентную вел ичину быстрее, чем задние колеса 4. Установлено, что автомобиль I приводится в движение
с 3%-нпй пробуксовкой, . Такая величина пробуксовки исключает скоростные взаимодействия между силовыми элементами привода передних и задних ведущих колес, когда не действуют никакие тяговые усилия, 3%-ная :пробуксовка представляет собой первое заранее определенное, процентное отношение. При этом установлено, что превьшение скорости в 1% пере,цними ведущими колесами 9 о беспечивает более активное вспомогательное действие дополнит ельного привода, причем это процентное отношение соответствует указанной вто- роЙ5 заранее определенной, процентной величине, ;
Отключенный режш работы обеспечивается четырьмя способами.
Первый способ состоит в том, что размыкают выключатель коробки 12 передач тогда, когда рычаг 7 переключения переводится в нейтральное положение или в более высокоскоростное положение, например для двилсеиия по улице.
Второй способ работы заключается в том, что ,от руки оперируют двух- позиционным (Включено-выключено) переютючателем 14 для дополнительного привода. Этот переключатель в разомкнутом состоянии препятствует подводу энергии к п,реобразователю напряглвния
Третий способ состоит В уменьшении прижатия (сцепления) основной , , которая размыкает выIШЮчaтeJIЬ 35 и препятствует подводу к серво- управляемому насосу 45 и соответ ственно к соленоидам 53 и 54,
Четвертый способ состоит в том, что выключатели 36 и 37 движения вперед или назад соответственно размы каются тогда, когда рычаг б направления движения, находится в нейтр аль- ном положении. Основанием для контроля включенного и выключенного состояний дополнительного привода является 15еобходимость исключить функционирование привода всегда, когда задние ведуцре колеса 4 находятся в состоянии, не связанном с основным приводом. В нормальном работы рьг-iar 6 направления находится в положении Вперед, рычаг 7 переключения передач в одной из заранее определенных ступеней, скорости и выключатель 35 для основной приводной муфты
в замкнутом состоянии. Вследствие этого нреобразователь 15 нанряжения получает энергию и подает питание на электронное управляющее устройство 13, 5 Датчики 16 и 25, сопряженные с задней и передней осями, выдают цифровые сигналы, которые пропорциональны скорости на входе заднего дифференциала и соответственно скорости вра0 щения гидравлических приводных дви- . гателей. Эти сигналы ноступают на командный преобразователь 18 и нреобразователь 24 обратной связи. мандный преобразователь 18 йьщает
5 унравляющий сигнал для командно-мо- дз-тфицирующего контура 20, Там сигнал инвертируется и модифицируется на первую, заранее определенную величину для того, чтобы выработать сигнал,
0 эквивалерттньй 3%-ной разнице межр,у средней скоростью задних ведуп1их колес и скоростью передних гидравлических приводных двигателей. Выходной сигнал: командно-модифицирующего
5 контура 20 является модифицированнЕ 1М управляющим сигналом, который обрабатывается в первой суммирующей цепи . 23 посредством суммирования с сигналом обратной связи, которьш является
0 выходным сигналом преобразователя 24 обратной связи. Посредством суммирования вырабатывается сервосигнал.
Для заданной скорости автомобиля 1 сигналы обратной связи и командные
5 сигналы отличаются, так как задний
. диМ еренцнал 17 и гидростатический
прИводио) дви1 атель 27 вращаются -с
различными .скоростями; Сервосигнал
равен нулю, когда достигается зараг
0 нее определенное соотношение скорос- т ей вращения колес. При этом модифи- цированный командный сигнал всегда больше, чем сигнал обратной связи, так что сервосигнал всегда прямо
пропорционален желаемой величине
срабатьшания для сервоклапана в сер- воуправляемом насосе 45, Таким образом, регулирование насоса осуществляется прямо пропорпдонально серво0 сигналу. t
Сервоснгнал усиливается в сервоусилителе 28 для обеспечения доста- ,точной точности электронной управляющей цепи 13 . Усиленный выходной
сервосигнал сервоусилителя 28 является входным сигналом для серво- фильтра 30. Сервофильтр 30 ограничивает скорость изменения в усиленном
сервосигнале своей постоянной времени, которая определяется для по- лучегтя достаточной с /абилъности в замкнутой системе регулирования, Сервофильтр 30 подводит далее усиленный сервосигнал к второй суммирующей цепи 31.
Если селектор 21 превьшения скорости предотвращает воздействие цепи 22 превьшения скорости на серво- депь 29, то вторая суммирующая цепь 31 вьщает управляющий сервосигнал, который рав-ен усиленному и отфильтрованному сервосигналу и подводится к управляющей цепи 38 Для движения вперед. Если выключатель 36 движения вперед замкнут посредством рычага 6 направления движения, то цепь управления движения вперед подводит управляющий сервосигнал к третьей суммирующей цепи 41/ В ней сигнал обрабатывается посредством суммирования с колебательным сигналом От генератора 43 и выдает управляющий сигнал для выходной цепи 44, которая сигнал напряжения преобра-, зует в сигйал тока с помощью дополнительного изменяющегося усиления для сервоуправляемого насоса 45. Колебательный сигнал повьщ1ает или гарантирует чувствительность сраба- тьшания управляющего клапана в сер- воуправляемом- насосе 45.
Если от цепи 42 управления движения назад нет никакого сигнала, то управляющий сигнал имеет положительную полярность. Это приводит к том-у, что питающие трубопроводы 46 и 49 приводят в действие приводные двигатели 27, Так как выключатель 36 движения вперед замкнут, то к срабатывающему от давления выключателю 51 движения вперед подводится сигнал. Выключатель 51 замыкается как только силовая основная коробка передач 5 установлена на движение вперед. При этом выкпючатель 51 выдает управляющий сигнал движения вперед на соленоид 53, для того, чтобы напорньй трубопровод 46 (для движения вперед) гидравли теской системы 48 соединить с напорным трубопроводом 55 вспомогательных муфт. .1
Пока передние 9 и задние 4 ведущие колеса 4 вращаются с .одинаковой скоростью, передние ведущие колеса 9 могут вращаться свободно, так как гидравлические двигатели выдают, .пищь
5504412
97% от колесной скорости задних колес. Еспи задние ведущие колеса 4 имеют пробуксовку 3%, то передние ведущие колеса 9 вращаются с той же скоростью, 5 что и гидравлические двигатели, а не быстрее. Муфты напротив сцепляются благодаря давлению в напорном трубопроводе 55 для муфт, так что двигатели 27 приводят в действие передние О -колеса 9.
Когда рычаг 6 направления движе - ния находится в положении Вперед, выключатель 36 движения вперед разомкнут, а выключатель 37 движения 15 назад замкнут. Сигналы, которые проходят через вторую суммирующую цепь 31, и управляющий сервосигнал цепи 38 управления движением вперед остаются такими же, как и раньще. Однако 20 цепь 38 управления движением вперед выдает контрольный сервосигнал на инвертор 40, который вырабатьшает инвертированный управляющий сервосигнал, который подводится к цепи 42 25 управления движением назад. Когда на нее поступает сигнал от выключателя 37, инвертированный управляющий сервосигнал подводится к третьей суммирующей цепи 41, где сигнал сумми- 30 руется с колебательным сигналом от колебательной цепи 43. Когда имеется инвертированн ый управляющий сервосигнал и не выдается никакого управляющего сервосигнала от цепи 38 уп- 35 равления движением вперед, управлто- сигнал имеет отрицательную полярность, в результате чего серво- управляемый насос 45 создает давление в напорных трубопроводах 47 и 50 40 движения назад, вследствие чего запускаются приводные двигатели 27 в направлении движения назад.
Когда выключатель 37 движения назад замкнут, энергия подводится к 45 манометрическому выключателю 52 для движения назад, которьй при срабатывании силовой коробки 5 передач движения назад вьщает сигнал управления движения назад на соленоид 54 50 для того, чтобы напорньш трубопровод 47 запитывал напорные трубопроводы 55 для впомогательных муфт.
Метод работы с превьшением скорости может быть реализован двумя 55 различными путями.
Первый путь состоит в том, что включают селектор 21 превьшения скорости, так что модифицированный
20
25
правляющий сигнал от командцо-мо- ифицирующего контура 20 поступает а фильтр 33 превьпиения скорости. этом фильтре возрастаЕощие модифиированные сигналы управления воз- 5 астают со второй заранее определеной скоростью, а убывающи е сигналы меньшаются- с третьей, заранее опрееленной скоростью. Воз }астающая cKopOQTb форг ируется с помощью по- 0 стоянной , и должна быть воз- мояа-ш большей5но согласующейся с реж1-том работы .командно-преобразую- щегося контура 18. Уменьшающаяся скорость определяется такой постоян- 5 ной времени, чтобы последняя была равна постоянной времени серво(|д-шьт- ра 30,
Модифицированньш управляющий сигнал после фильтра .подводится к модифицирующей цепи 32 превышения ско - pocTHj которая модифицирует сигнал до заранее определенной величины с тем, чтобы выдать сигнал превышения скорости для суММИрОВаТШЯ во ВТО
рую суммирующую цепь 3I, где сигнал сумГ Шруется с усилен 1ым сервосигна- лом сервофильтра 30, В этом случае управля;опщ11 сервосигнал пропорционален скорости передних педуш 1х колес 30 9, которые вращаются на 1% быстрее, чем задние ведущие колеса, т,е« со скоростью, равной 101% от скорости посшедних.
Второй способ получения режима 35 работы с нревьпиением скорости осу ществляется автоматически при нор - мальной работе, когда рычаг хода (направления) с самого начала перемещен из нейтрал1зНого положения в 40 положепие двшхения вперед или на- за,ц или находится в промежуточном полол епии между положениями движения вперед и движения назад.
Когда рычаг б переведен в положе- 45 пие.двгокения вперед, выютючатепь 36 замкнут и выдает сигнал в цепь 38 зшравления движением вперед,, котО рая в свою очередь выдает сигнал далее на блокирупогщпо (удерживающую) 50 цепь 39, Сигнал, проходящий через резистор 71 (фиг,3), включает транзистор 70 и заземляет проводник 68, KOTOpbrii под1С 1Ючен к мультивибратору 67. Мультивибратор остается включен™ 55 ным приблизительно 4 секунды, при этом оттфываеТся транзистор 64 и создается напряжение V| в проводни
ке 63. Напряжение V| в проводнике 63 создает обратное напряжение смещения на диоде 6и, в результате чего включается (открьюается) транзистор 57, Вследствие этого входная линия 56 соединяется с выходной линией 58 и модифицированный сигнал управления подводится к фильтру 33 превышения скорости. Цепь 42 управления, предусмотренная для движения назад, функционирует аналогичным образом.
В течение 4-секундного интервала, во время которого мультивибратор 67 включен, а именно непосредственно после перемещения рычага направления движения в переднее или в заднее положение, фильтр 33 превьшения. скорости разрешает Црохо)вдение через него модифицированного управляющего сигнала без воздействия на него, так как постоянная времени нарастания в этой цепи выбрана очень малой для того, чтобы пропускать частоты от командно-преобразующего контура 18. Это позволяет сигналу превышения скорости, поступающему от модифицирующей цепи 30 превышения скорости во вторую суммирующую цепь 31, быть нерегулируемым по отношению-ко времени срабатывания. При этом сервоуправ- ляемый насос 45 приво,цит в действие гидравлические приводные двигатели 27 с такой возрастающей скоростью вращения, с Какой изменяется скорость задних ведуищ-к колес Когда заранее определенное время выдержки истечёт, мультивибратор 67 выключит транзистор ,64 и напряжепие на линии сн1пкает- ся до V,. Всл.едствие этого обратное смещение с диода 60 снимается, он становится проводящим и выкточает транзистор 57. Сигнал превышения скорости от фильтра 33 превышения скорости спадает с такой же скоростью, с какой возраст&ет усиленный сервосигнал из сервофильтра 30, так что управляющей сервосигнал второй сум- мируюш,ей цепи 31 остается относительно постоянным.
Различные скорости возрастания и снижения в цепи фильтра превыщения скорость достигается посредстёом заряда конденсатора 81 через резистор ,80 для получения постоянной времени для второй заранее определенной ско
рости изменения и посредством разряда конденсатора 81 через резистор 80 для получения другой постоянной
времени для третьей заранее определенной скорости изменения. Так получают одну скорость для возрастаюпщх сигналов и другую - для спадающих сигналов.
Проблема,.которая возникает при работе электронной цепи 13 управления во время быстрого установочного перемещения рычага направления движения между положением вперед и положением назад, заключается в том что когда автомобиль 1 прочно засел и водитель старается раскачивать автомобиль вперед и назад, чтобы выехать, сервофильтр 30 не может достаточно быстро снижать усиленньй сервосигнал, а именно из-за постоянной времени. Поэтому эта цепь выполнена из транзисторов 70 и 74 и линии 58 так, что конденсатор 76 всегда разряжается, когда рычаг 6 выбора направления находится в нейтральном положении,-При этом проводник 62 заземлен до тех пор, пока от управляющих цепей 38 Или 42 движения вперед или назад к транзистору 70 подводится входной сигнал, вследствие чего транзистор 74 включен (закрыт) и конденсатор 76 работает как обычно. Однако, как только рычаг 6 выбора направления переводится в н.ейтральное положение, транзистор 70 выключается (закрывается), в то время как транзистор 74 становится проводящим (открывается), чтобы разрядить конденсатор 76 через резистор 75 и транзистор 74 на зем
10
15
16
лю, вследствие чего обеспечивается другая (меньшая) постоянная времениt
Другой проблемой была необходимость учитывать ситуацию, при которой нагрузка приводит агрегат к остановке, причем передние колеса блокируются, а задние - прокручиваются (пробуксовывают). Это снижает сигнал обратной свйзи до нуля, в то время как модифицированный управляющий сигнал остается в дальнейшем неизменным, сервоуправляемый насос увеличивает давление на выходе до тех пор, пока не откроется предохранит ейьный клапан в гидравлической системе 48. При незначительных скоростях передач появляются значительные потери энергии из-за того, что рабочая жидкость подается насосом через предохранительный клапан, не выполняя при этом никакой полезной работы. При более высоких скоростях передачи потери мощности приводит к тому, что двигатель 2 глохнет. Эта 25 проблема решена благодаря введению в систему цепи 34. Она использует модифицированные сигналы управления для получения максимальных значений, при которых регламентируется управ- 30 ляющий сервосигнал, чтобы исключить протекание чрезмерного гидравлического потока от севроуправляемого насоса 45, следовательно, когда мо-- дифицированный управляющий сигнал уменьшается, уменьшается и напряжение фиксации (ограничения) для управляющего сервосигнала.
20
35
| название | год | авторы | номер документа |
|---|---|---|---|
| Вспомогательный тяговый привод для одного или нескольких неприводных колес транспортного средства с главным приводом по крайней мере на одну пару колес | 1979 |
|
SU1263201A3 |
| Головной агрегат хлопкоуборочной машины | 1982 |
|
SU1271358A3 |
| Самоходный комбайн | 1980 |
|
SU921447A3 |
| Передвижная лесообрабатывающая машина | 1976 |
|
SU1186072A3 |
| Уборочный аппарат машины для обработки кустов хлопчатника рядового посева | 1982 |
|
SU1274611A3 |
| ГРУЗОВОЙ АВТОМОБИЛЬ СО ВСЕМИ ВЕДУЩИМИ КОЛЕСАМИ | 2011 |
|
RU2483945C1 |
| Устройство для направления уборочной машины по рядкам растений | 1984 |
|
SU1360570A3 |
| ГИДРООБЪЕМНЫЙ ПРИВОД ПЕРЕДНИХ КОЛЕС ТРАКТОРА | 2017 |
|
RU2676254C1 |
| Зерноуборочный комбайн | 1983 |
|
SU1237063A3 |
| ГРУЗОВОЙ АВТОМОБИЛЬ С ПЕРЕДНИМИ И ЗАДНИМИ ВЕДУЩИМИ КОЛЕСАМИ | 2011 |
|
RU2483947C1 |
0уе.7
2У
33
77 „ «
IS
Составитель А.Барыков Редактор М, Иедолуженко Техред И.ПоповичКорректор; М.Пржо
Заказ 4730/59Тираж 647.Подписное
ВИНИЛИ Государственного кo итeтa СССР по делам изобретений и. открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород,, ул. Проектная, 4
| Патент США №-3865207, 180/44 Г, .1975. |
