Изобретение относится к автоматизации процессов заг рузки-разгрузки штучных изделий, имеющих двусторонние выступы, и может быть использовано в машиностроении, приборостроении и других областях как средство для удержания изделия при транспортировке.
Целью изобретения является унроихение конструкции.
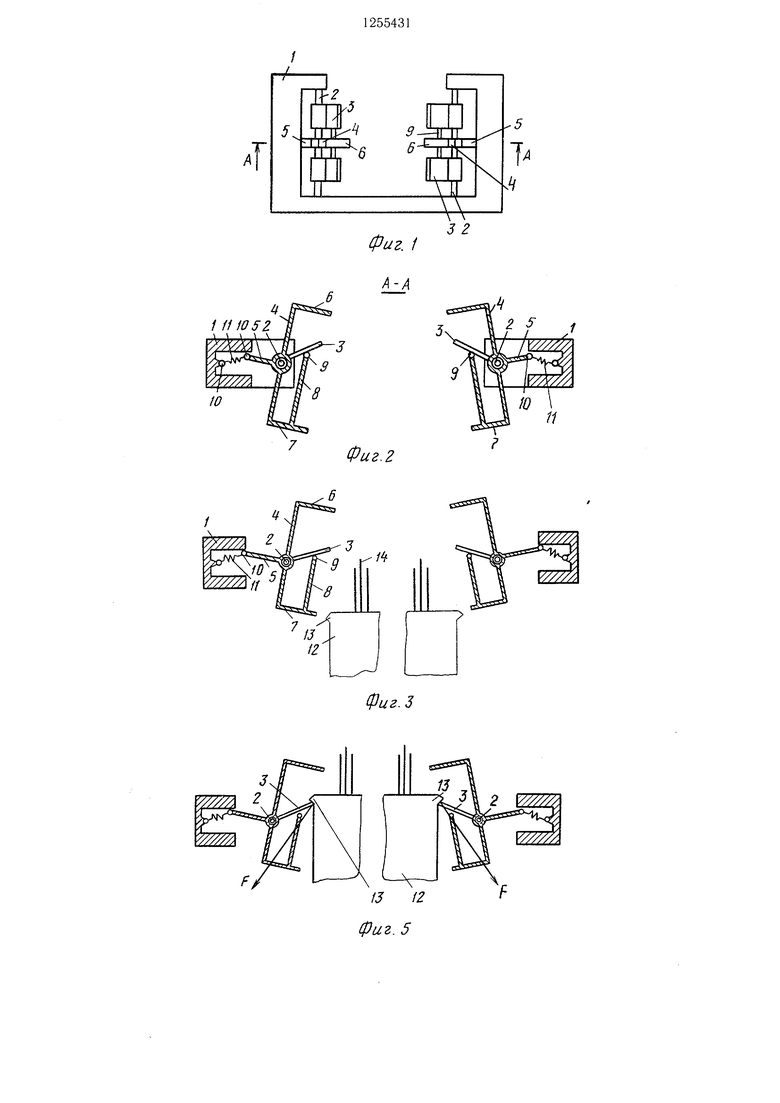
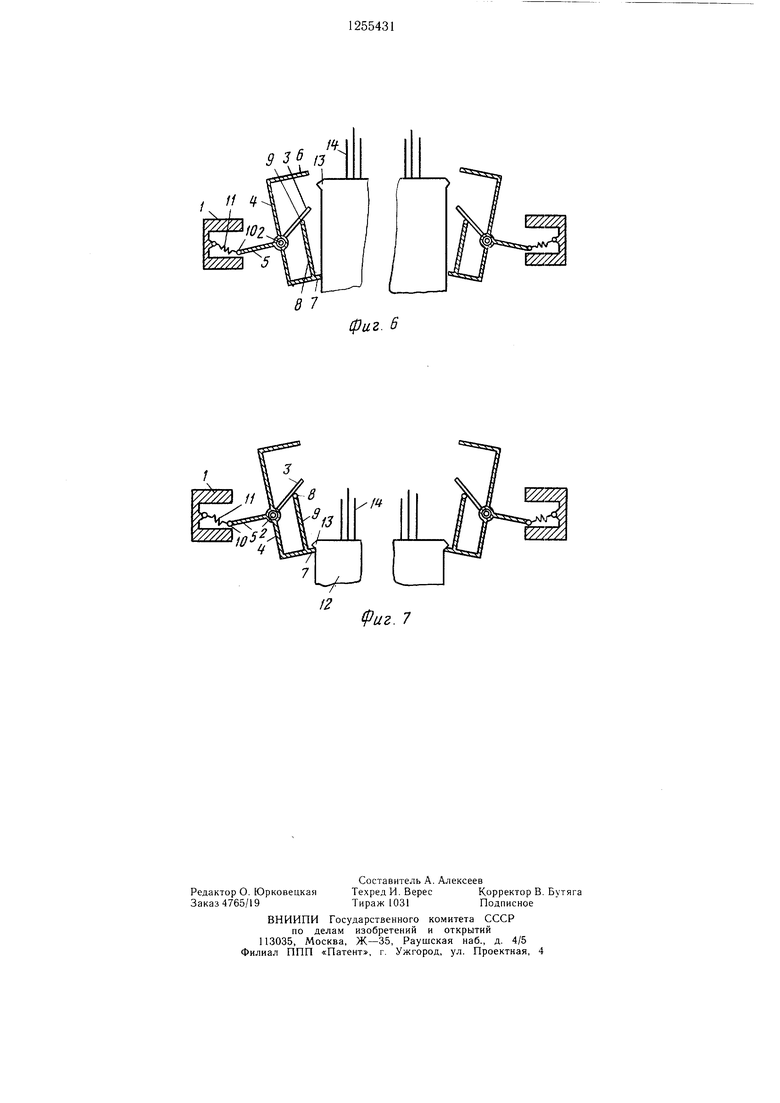
На фиг. i показано захватное устройство в исход юм состоянии, зид сверху; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 и 4 - последовательность установки изделия в захватное устройство; на фиг. 5 - статическое состояние захватного устройства с изделием; на фиг. 6 и 7 - последовательность извлечения изделия из -захватного устройства.
Захватное устройство содержит корпус 1 с закрепленными в нем ося.ми 2. на которых Н1арнирно закреплены захьатные рычаги 3 и трехнлечие рычаги 4 с плечами 5-7 и стой- кой 8 с упором 9, к корпусу 1 и плечу 5 трехплечего рычага с помощью шарниров 10 присоединена фужина 11.
Захватываемое изделие 12 имеет в верхней части выступы 13 и на торце гибкие выводы 14.
Устройство работает следующим образом .
Захватываемое изделие 12 ориентируют относительно захватного устройства (фиг.3) и начинают поднимать. Выстуны 13, взаимо- действуя с захватными рычагами 3, поворачивают их вокруг осей 2, пока рычаги не соскользнут с выступов. При этом под действием собственного веса захватные рычаги 3 разворачиваются в обратном направлении до соприкосновения их концов с граня- ми захватываемого изделия (фиг. 4). Захватываемое изделие начинают опускать. Трение .между концами захватных рычагов и вертикальными гранями захватываемого изделия недостаточно для заклинивания рычагов. Поэтому захватные рычаги 3 иро- скальзынают по металлическим вертикаль- ным граням до тех пор, пока выступы 13 не упрутся в захватные рычаги (фиг. 5). Захватываемое изделие зависает на захватных рычагах, опираясь на них, как на кон- солььи е опоры.
Воздействие веса захватываемого изделия сводится к тому, что па каждый захватный рычаг действует сила F, направленная нормально к нижней поверхности выступа 13 в месте его соприкосновения с захватным рычагом 3. Оси 2 расположены вынш (фиг. 5} направления действия сил F. Поэтому силы F создают на Н1арнирно закреплен ые
0
о
0
0
захватные рычаги крутящий момент, прижимающий их к захватываемому изделию. Захватываемое изделие под собственным весом заклинивается в захватных рычагах и выскользнуть из них не .может. В таком состоянии захватное устройство с изделием можно транспортировать к рабочим местам и проводить необходимые технологические онерации, например подключать к выводам 14 исиытательные установки, ко.м.мутировать выводы пайкой, сушить пакет и пр.
Для освобождения захватываемого изделия его поднимают, пока краями верхнего торца оно не развернет за плечо 6 трехпле- чий рычаг 4 ло такого положения, при котором нлечо 5 развернет, сжилгая, пружину 11 до ее нейтрального пoлoжe lия. Пружина 11 поворачивается и, разжимаясь, перекидывает за плечо 5 трехплечий рычаг 4 в другое устойчивое состояние, при которо.м конец плеча 5 с шарниром 10 снова упирается в корпус 1. При этом плечо 7 рычага приближается к грани захватываемого изделия, а стойки 8 упорами 9 разворачивают захватные рычаги 3 от захватываемого изделия (фиг. 6).
Захватываемое изделие опускают. При этом выступы 13 проходят захватные рычаги 3, не взаимодействуя с ними. При дальнейшем опускании выступы 13 входят в соприкосновение с нлечо.м 7 трехплечего рычага (фиг. 7) и перекидывают трехплечий рычаг в исходное состояние (фиг. 3).
Формула изобретения
Захватное устройство, содержащее корпус с шарнирно установленными на не.м захватными рычагами и средство приведения захватных рычагов в рабочее гюложе- mie, отличающееся тем, что, с целью упро- ш,ения конструкции, средство приведения захватных рычагов в рабочее положение выполнено в виде трехнлечих рычагов, шарнирно установленных на корпусе соосно оси качания захватных рычагов, причем первое плечо каждого трехплечего рычага связано посредством пружины с корпусом, оси шарниров крепления захватных и трехплечих рычагов, а также точки крепления пружин к корпусу расположены на одной линии, при этом на втором плече трехнлечего рычага закреплен введенный упор, предназначенный для взаимодействия с захватны.м рычагом, размещенным между вторым и третьим n;ie- чами трехплечего рычага, которые предназначены для взаимодействия с захватываемым изделием.
Т
фиг. 1
32
| название | год | авторы | номер документа |
|---|---|---|---|
| Буквопечатающий механизм к счетному табулятору | 1959 |
|
SU129140A1 |
| Установка для наклеивания обоев | 1977 |
|
SU751665A1 |
| Захватное устройство для полых изделий | 1980 |
|
SU895889A1 |
| Карбюратор для двигателя внутреннего сгорания | 1986 |
|
SU1318712A1 |
| Противоугонный захват для кранов | 1972 |
|
SU446462A1 |
| Механизм отрезки заготовок автомата для объемной штамповки | 1987 |
|
SU1558549A1 |
| Грузозахватное устройство | 1984 |
|
SU1212913A1 |
| Манипулятор | 1986 |
|
SU1371851A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ОДНООБОРОТНОЙМУФТОЙ | 1972 |
|
SU425006A1 |
| БИБЛИОТЕКА I | 1970 |
|
SU281185A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах для захвата деталей, имеюш,их двусторонние выступы. Целью изобретения является упрощение конструкции. Захватное устройство содержит захватные рычаги (ЗР) 3 и трехплечие рычаги (ТР) 4, шарнир- но установленные на корпусе (К) 1. При перемещении устройства на изделие ЗР 3 поворачиваются вокруг осей и проскальзывают по боковым поверхностям изделия. При подъеме устройства ЗР 3 контактируют с выступами 13 изделия, последние расклиниваются и изделие зависает на ЗР 3. При опускании устройства с изделием верхнее плечо 6 ТР 4 упирается в изделие, и, проходя нейтральное положение, переводит пружину 11 из одного устойчивого положения в другое. ЗР 3 ложатся на упор 9. При подъеме устройства нижнее плечо 7 ТР 4 взаимодействует с выступами изделия и переключает пружину 11, приводя устройство в рабочее положение. 7 ил. & / // to ел ел СО фиг. 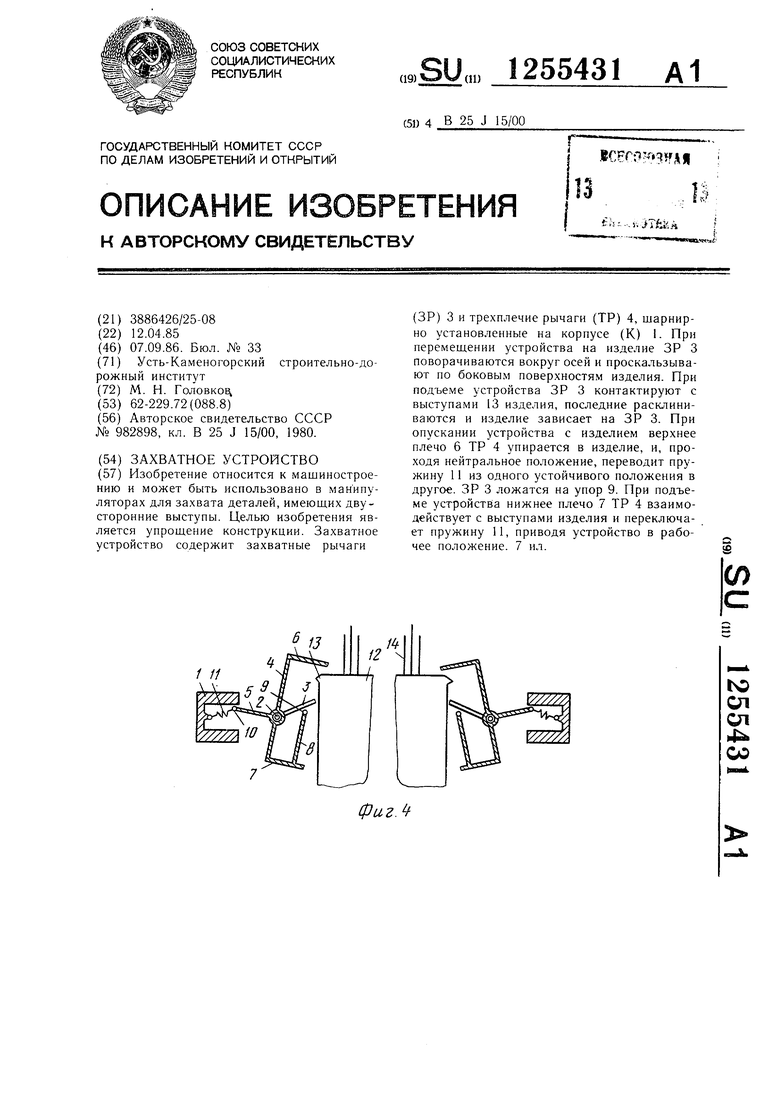
П1 W5Z
W
f /
Фиг. г
Фиг.З
Jf /J
фиг. 6
(риг. 7
Редактор О. Юрковецкая Заказ 4765/19
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Составитель А. Алексеев Техред И. ВересКорректор В. Бутяга
Тираж 1031Подписное
| Захват манипулятора | 1980 |
|
SU982898A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
