(54) -ЗАХВАТ 11АНИПУЛЯТОРД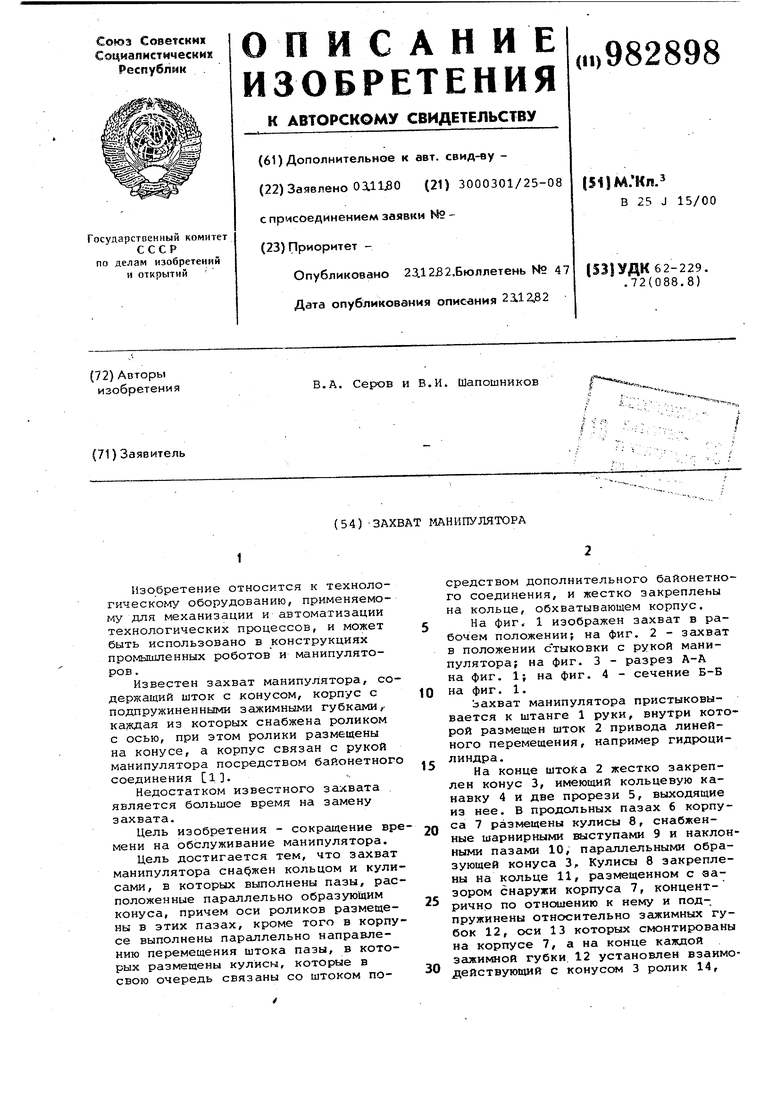
| название | год | авторы | номер документа |
|---|---|---|---|
| Стыковочное устройство робота | 1989 |
|
SU1627403A1 |
| Захват | 1977 |
|
SU663577A1 |
| Захват | 1977 |
|
SU667396A1 |
| Стыковочное устройство | 1975 |
|
SU543513A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
Изобретение относится к технологическому оборудованию, применяемому для механизации и автоматизации технологических процессов, и может быть использовано в конструкциях промышленных роботов и манипуляторов .
Известен захват манипулятора, содержащий шток с конусом, корпус с подпружиненными зажимными губками,каждая из которых снабжена роликом с осью, при этом ролики размещены на конусе, а корпус связан с рукой манипулятора посредством байонетного соединения 1%
Недостатком известного захвата является большое время на замену захвата.
Цель изобретения - сокращение времени на обслуживание манипулятора.
Цель достигается тем, что захват манипулятора снабжен кольцом и кулисами, в которых вьтолнены пазы, расположенные параллельно образующим конуса, причем оси роликов размещены в этих пазах, кроме того в корпусе выполнены параллельно направлению перемещения штока пазы, в которых размещены кулисы, которые в свою очередь связаны со штоком посредством дополнительного байонетного соединения, и жестко закреплены на кольце, обхватывающем корпус.
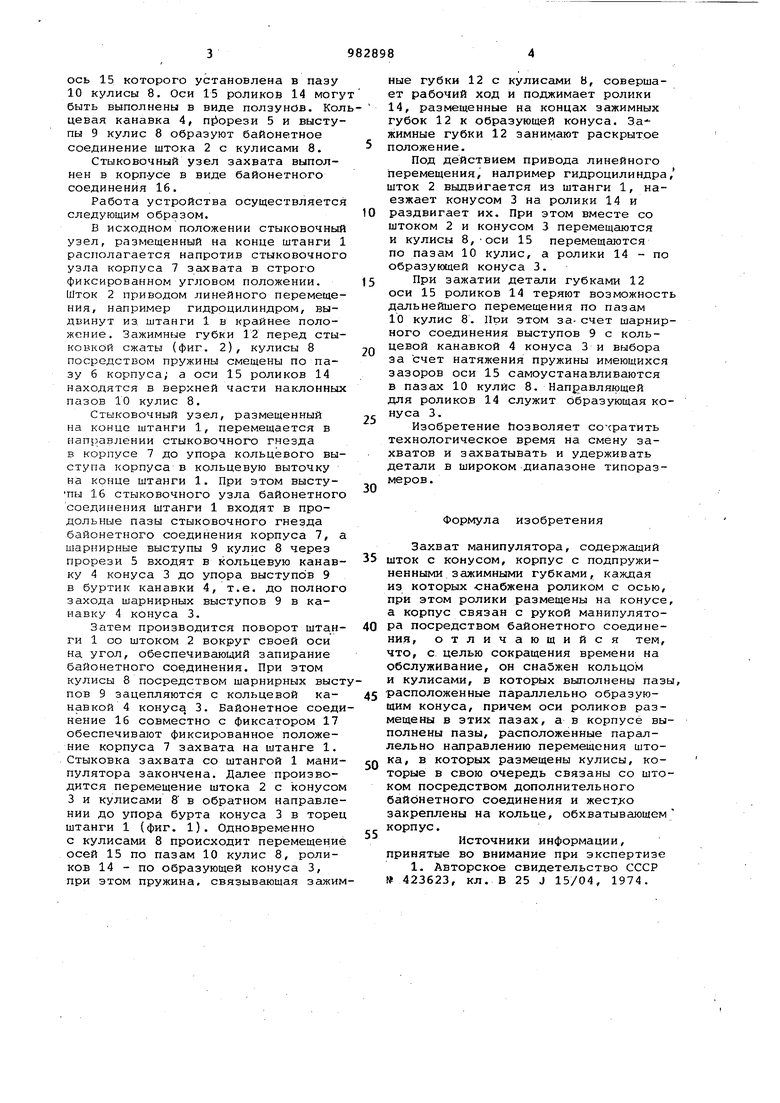
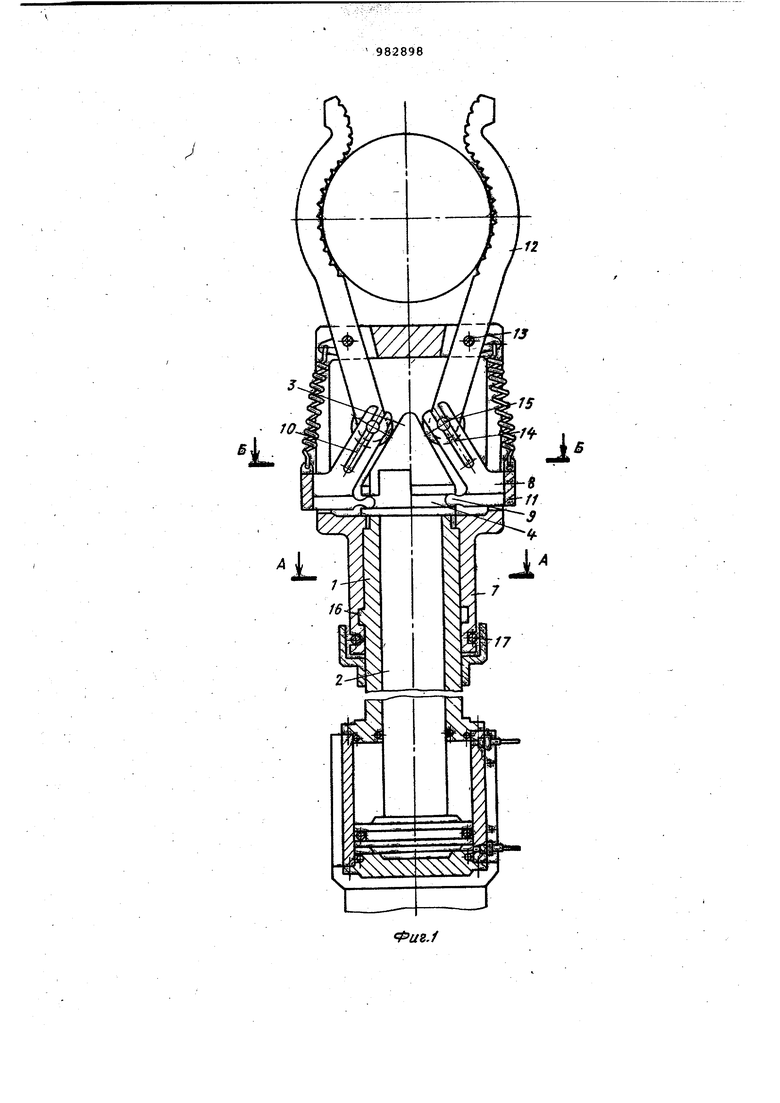
На фиг 1 изображен захват в рабочем положении; на фиг. 2 - захват в положении стыковки с рукой манипулятора; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1.
10
Захват манипулятора пристыковывается к штанге 1 руки, внутри которой размещен шток 2 привода линейного перемещения, например гидроцилиндра.
15
На конце штока 2 жестко закреплен конус 3, имеющий кольцевую канавку 4 и две прорези 5, выходящие из нее. В продольных пазах 6 корпуса 7 размещены кулисы 8, снабжен20ные шарнирными выступами 9 и наклонными пазами 10, параллельными образующей конуса 3, Кулисы 8 закреплены на кольце 11, размещенном с аазором снаружи корпуса 7, концент25рично по отнсяиению к нему и под-, пружинены относительно зажимных губок 12, оси 13 которых смонтированы на корпусе 7, а на конце каждой зажимной губки 12 установлен вэаимо30действукиций с конусом 3 ролик 14,
ось 15 которого установлена в пазу 10 кулисы 8. Оси 15 роликов 14 могу быть выполнены в виде ползунов. Колцевая канавка 4, п Зорези 5 и выступы 9 кулис 8 образуют байонетное соединение штока 2 с кулисами 8.
Стыковочный узел захвата выполнен в корпусе в виде байонетного соединения 16.
Работа устройства осуществляется следующим образом.
В исходном положении стыковочный узел, размещенный на конце штанги 1 располагается напротив стыковочного узла корпуса 7 захвата в строго фиксированном угловом положении. Шток 2 приводом линейного перемещения, например гидроцилиндром, выдвинут из штанги 1 в крайнее положение. Зажимные губки 12 перед стыковкой сжаты (фиг. 2), кулисы 8 посредством пружины смещены по пазу б корпуса; а оси 15 роликов 14 находятся в верхней части наклонных пазов 10 кулис 8.
Стыковочный узел, размещенный на конце штанги 1, перемещается в нап завлении стыковочного гнезда в корпусе 7 до упора кольцевого выступа корпуса в кольцевую выточку на конце штанги 1. При этом выступы 16 стыковочного узла байонетного соединения штанги 1 входят в продольные пазы стыковочного гнезда байонетного соединения корпуса 7, а шарнирные выступы 9 кулис 8 через прорези 5 входят в кольцевую канавку А конуса 3 до упора выступов 9 в буртик канавки 4, т.е. до полного захода шарнирных выступов 9 в канавку 4 конуса 3.
Затем производится поворот штанги 1 оо штоком 2 вокруг своей оси на угол, обеспечивающий запирание байонетного соединения. При этом кулисы 8 посредством шарнирных выст пов 9 зацепляются с кольцевой канавкой 4 конуса 3. Байонетное соединение 16 совместно с фиксатором 17 обеспечивают фиксированное положение корпуса 7 захвата на штанге 1. Стыковка захвата со штангой 1 манипулятора закончена. Далее производится перемещение штока 2 с конусом 3 и кулисами 8 в обратном направлении до упора бурта конуса 3 в торец штанги 1 (фиг. 1). Одновременно с кулисами 8 происходит перемещение осей 15 по пазам 10 кулис 8, роликов 14 - по образующей конуса 3, при этом пружина, связывающая зажимные губки 12 с кулисами 8, совершает рабочий ход и поджимает ролики
14, размещенные на концах зажимных губок 12 к образующей конуса. Зажимные губки 12 занимают раскрытое 5 положение.
Под действием привода линейного перемещения, например гидроцилиндра/ шток 2 выдвигается из штанги 1, наезжает конусом 3 на ролики 14 и
0 раздвигает их. При этом вместе со штоком 2 и конусом 3 перемещаются и кулисы 8,ОСИ 15 перемещаются по пазам 10 кулис, а ролики 14 - по образующей конуса 3.
5 При зажатии детали губками 12
оси 15 роликов 14 теряют возможность дальнейшего перемещения по пазам 10 кулис 8. При этом за-счет шарнирного соединения выступов 9 с кольQ девой канавкой 4 конуса 3 и выбора за счет натяжения пружины имеющихся зазоров оси 15 самоустанавливаются в пазах 10 кулис 8. Направляющей для роликов 14 служит образующая конуса 3.
Изобретение Позволяет сократить технологическое время на смену захватов и захватывать и удерживать детали в широком диапазоне типоразмеров .
Формула изобретения
Захват манипулятора, содержащий 5 шток с конусом, корпус с подпружиненными зажимными губками, каждая из которых -снабжена роликом с осью, при этом ролики размещены на конусе, а корпус связан с рукой манипулято0 РЭ посредством байонетного соединения, отличающийся тем, что, с целью сокращения времени на обслуживание, он снабжен кольцом и кулисами, в которых выполнены пазы, 45 расположенные параллельно образующим конуса, причем оси роликов размещены в этих пазах, а в корпусе выполнены пазы, расположенные параллельно направлению перемещения штока, в которых размещены кулисы, которые в свою очередь связаны со штоком посредством дополнительного байонетного соединения и жест; о закреплены на кольце, обхватывающем корпус.
Источники информации, принятые во внимание при экспертизе
6
Физ.з
.
