Фиг. 2
(Л
со
оо ел
Изобретение относится к конструкции автооператоров и манипуляторов и может быть использовано для захвата и транспортировки с последующей укладкой в пакеты деталей желобчатой формы типа рештаков для угольных конвейеров.
Целью изобретения - повышение надежности работы.
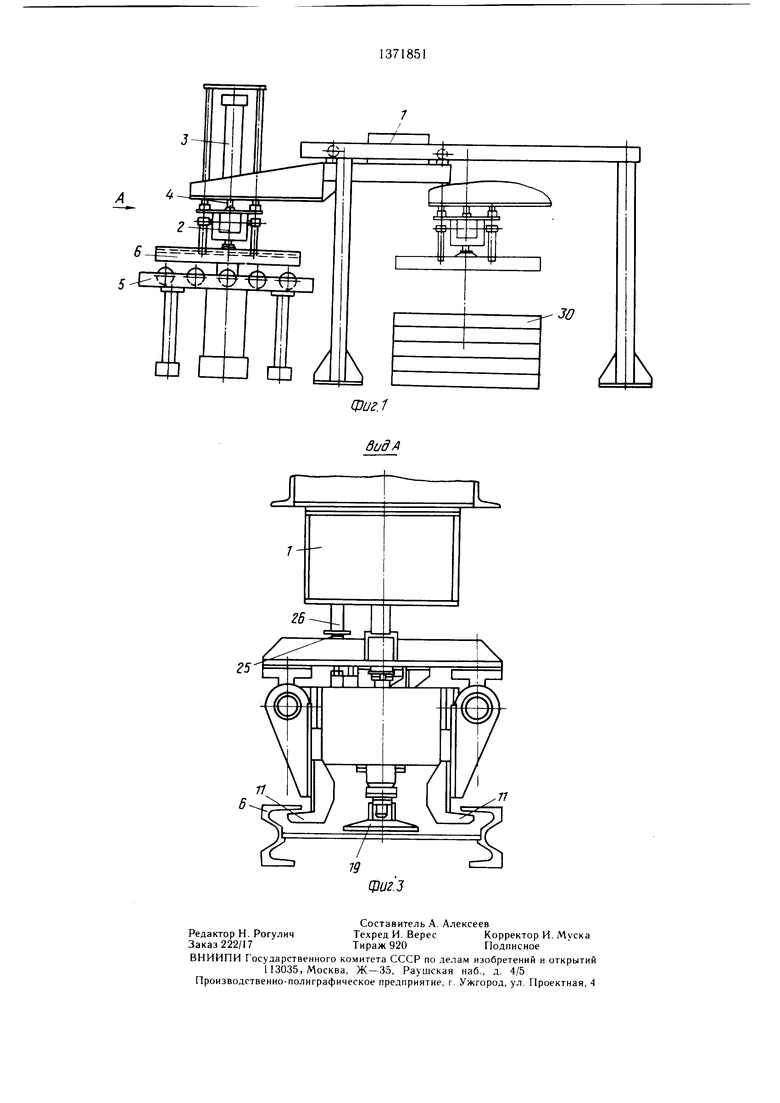
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - кинематическая схема захватного устройства; на фиг. 3 - вид А на фиг. 1.
ЛАанипулятор состоит из самоходной каретки, на корпусе 1 которой закреплен рабочий орган - захватное устройство 2, каретка снабжена приводом (не показан). Приводом захвата служит пневмоцилиндр 3, на штоке 4 которого шарнирно закреплено захватное устройство 2. Под захватным устройством расположен подъемный рольганг 5, на котором находится деталь (рештак) 6.
Захватное устройство состоит из траверсы 7, несущей направляющие 8. На траверсе 7 закреплены оси 9, на которых жестко посажены зубчатые колеса 10, губки 11 и флажок 12, взаимодействующий с конечным выключателем 13. Зубчатые колеса 10 находятся в зацеплении с зубчатыми рейками 14, закрепленными на корпусе фиксирующего механизма 15, корпус которого посажен на скалки 16, закрепленные на траверсе 7. Скалки снабжены пружинами 17 и упорами 18. На корпусе 15 жестко закреплен упор 19 с зацепом 20, который взаимодействует с выступом 21 на одном плече двуплечего рычага 22, установленного при помощи щарнира 23 и пружины 24 на траверсе 7. На другом плече двуплечего рычага 22 установлена пята 25, взаимодействующая в крайнем верхнем положении захватного устройства с упором 26. Двуплечий рычаг 22 прижат пружиной 24 к винтовому регулируемому упору 27. На корпусе 1 установлен конечный выключатель 28, а на траверсе 7 - его флажок 29.
Манипулятор работает следующим образом.
Каретка подается с захватным устройством 2 к подъемнику рольганга 5, подающему деталь 6 в раствор (зону) губок 11. Рольганг 5 опускается, а деталь 6 зависает на губках. После этого автоматически включается привод (не показан) перемещения каретки и деталь 6 перемещается на позицию 30 укладки (пакетировки). Автоматически включается пневмоцилиндр 3, и захватное устройство 2 опускается и опускает рештак 6 на позицию 30 укладки. Достигнув укладки, рещтак останавливается, а захватное устройство 2 продолжает перемещаться вниз до соприкосновения с деталью 6 упора 19. Корпус 15 останавливается, а продолжающее движение вннз зубчатое колесо 10, обкатываясь по рейкам 14, поворачивает вокруг оси 9 губки 11, до выхода их из детали 6. Одновременно пружина 17 сжимается и упоры 18 отходят от корпуса 15, при этом зацеп 20 сцепляется с выступом 21, а флажок 12 воздействует
на конечный выключатель 13, по сигналу которого пневмоцилиндр 3 переключается на ход вверх. Захватное устройство 2 перемещается вверх с отведенными губками 11, так как выступ 21 удерживает от поворота губки 1I.
В крайнем верхнем положении захватного устройства 2 пята 25 находит на упор 26, и двуплечий рычаг 22 поворачивается вокруг щарнира 23, освобождая зацеп 20 от выступа 21. Под действием пружин 17 корпус 15 начинает перемещаться вниз до упора 18. Вместе с корпусом 15 перемещаются рейки 14, вращающие зубчатые колеса 10, и губки 11 возвращаются в исходное положение. Движение захватного устройства 2 вверх прекращается при замыкании конечного выключателя 28 флажком 29. После этого каретка возвращается к рольгангу 5 и въезжает губками II в следующую деталь 6. Цикл повторяется.
30
Формула изобретения
Манипулятор, содержащий основание, в направляющих которого установлена каретка, захватное устройство, установленное на каретке с возможностью вертикального пере5 мещения, фиксирующий и приводной механизмы, отличающийся тем, что, с целью повышения надежности работы, захватное устройство выполнено в виде траверсы с щар- нирно установленными на ней губками, жестко связанными с зубчатыми колесами, находящимися в зацеплении с рейками, закрепленными на корпусе фиксирующего механизма, который размещен на траверсе с возможностью вертикального перемещения и подпружинен относительно нее, фиксирую5 щий механизм выполнен в виде упоров, установленных на траверсе с возможностью взаимодействия с корпусом фиксирующего механизма, упора и зацепа, установленных на корпусе фиксирующего механизма, причем зацеп предназначен для взаимодействия с
0 выступом, выполненным на одном из плеч двуплечего рычага, щарнирно установленного на корпусе фиксирующего механизма и подпружиненного относительно него, при этом другое плечо этого рычага предназначено для взаимодействия с упором.
5
расположенным на каретке.
А 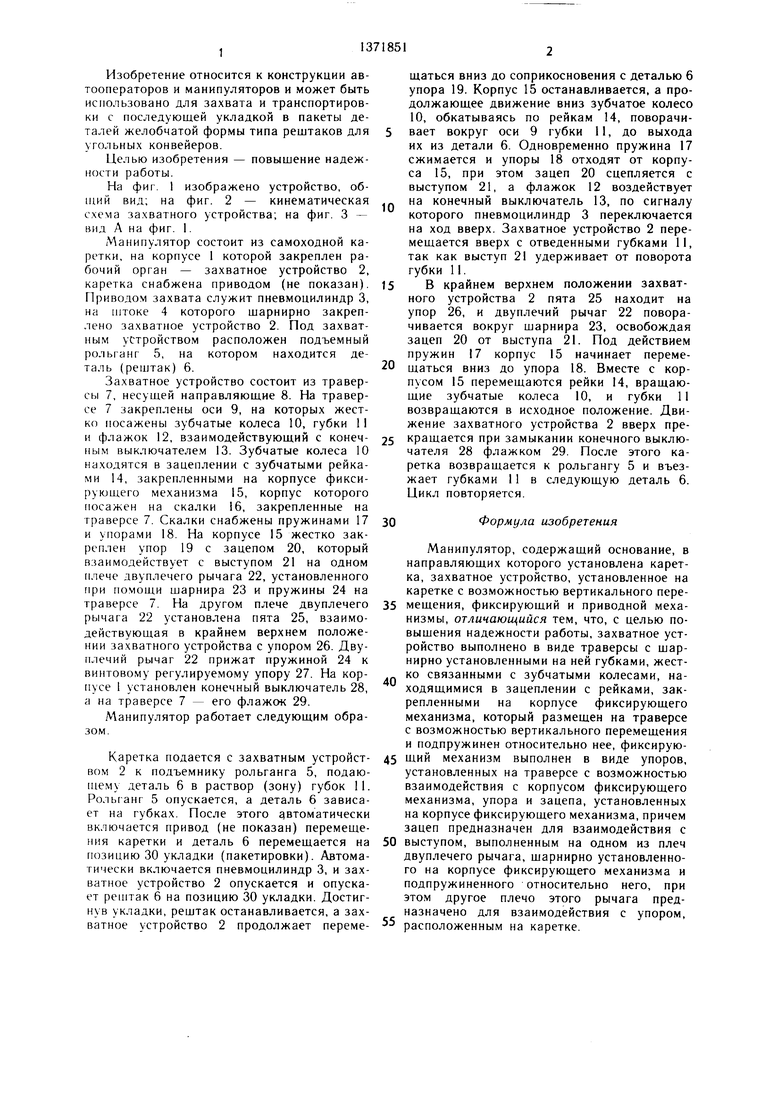
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Устройство для укладки в пакет чушек | 1984 |
|
SU1207948A1 |
| Автомат для подготовки электрическихпРОВОдОВ K МОНТАжу | 1978 |
|
SU845207A1 |
| Устройство для правки горячего проката растяжением | 1975 |
|
SU570428A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1973 |
|
SU381498A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
Изобретение относится к конструкции автооператоров и манипуляторов для захвата, транспортировки и укладки в пакеты деталей преимущественно желобчатой формы. Целью изобретения является повышение надежности работы. Каретка подается к детали 6, которая зависает на губках 11. Каретка вместе с деталью перемешается на позицию укладки. Захватное устройство опускается до соприкосновения с деталью 6 упора 19. Корпус 15 механизма фиксации останавливается, зубчатые колеса 10, обкатываясь по рейкам 14, поворачивают губки 11 до вывода их из детали 6. Одновременно упоры 18 отходят от корпуса 15, при этом зацеп 20 сцепляется с выступом 21. Затем захватное устройство перемешается вверх с отведенными губками 11. В крайнем верхнем положении захватного устройства пята 25 находит на упор 26, двуплечий рычаг поворачивается, освобождая зацеп 20 от выступа 21. Корпус 15 перемешается вниз до упора 18. 3 ил.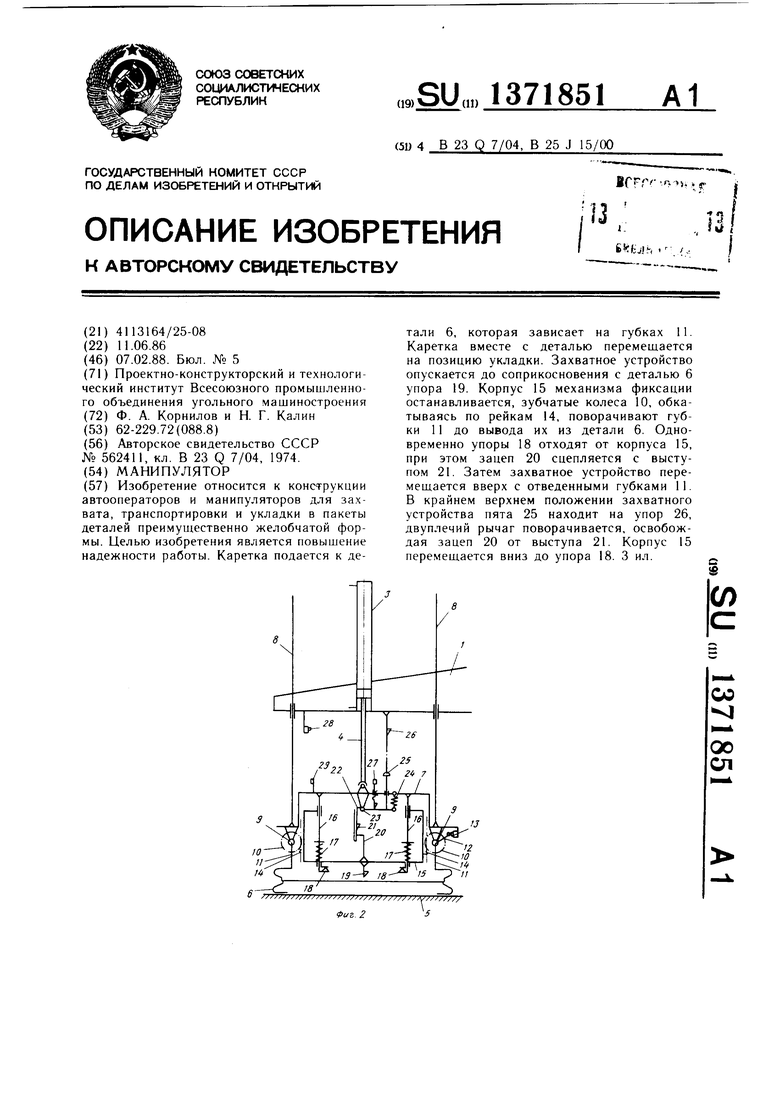
| Атооператор | 1974 |
|
SU562411A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
