(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОЛЫХ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Грузозахватное устройство | 1981 |
|
SU1031870A1 |
| Грузозахватное устройство | 1973 |
|
SU466163A1 |
| Грузозахватное устройство | 1979 |
|
SU931648A1 |
| Грузозахватное устройство | 1980 |
|
SU895892A1 |
| Грузозахватное устройство | 1977 |
|
SU709500A1 |
| Грузозахватное устройство | 1986 |
|
SU1397399A1 |
| Захватное устройство для контейнеров с цапфами | 1982 |
|
SU1054275A1 |
| Грузозахватное устройство | 1983 |
|
SU1105441A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
1
Изобретение относится к грузозахватным устройствам, предназначенным, в частности, для захвата и транспортирования полых изделий.
Известно захватное устройство для полых изделий, содержащее корпус, шарнирно установленные на нем захватные лапы и механизм фиксации их положения, включающий в себя систему подпружиненных рычагов и щарнирных звеньев 1.
Однако это устройство имеет сложную конструкцию из-за сложного устройства механизма фиксации.
Наиболее близким к изобретению по технической сущности является захватное устройство для полых изделий, содержащее корпус с гибкой тягой для соединения с грузоподъемным механизмом и .щарнирно установленные на корпусе захватные лапы, каждая из которых снабжена контргрузом и механизмом фиксации ее положения, включающим щарнирно закрепленный на корпусе рычаг, подпружиненный цилиндрической пружиной 2.
Недостатком этого устройства является недостаточно высокая надежность его работы, так как пружина рычага механизма
фиксации испытывает нагрузки, соизмеримые с весом всего устройства и теряет свои упругие свойства в процессе работы.
Целью изобретения является повышение надёжности работы захватного устройства. , Поставленная цель достигается тем, что рычаг механизма фиксации выполнен трехплечим, одно из плеч которого имеет Т-образный выступ, а на другом плече закреплен стержень, на который насажен один конец пружины, причем на корпусе закреплен ограничитель поворота рычага и контргруза
10 и шарнирно установлена гайка с винтом, на хвостовике которого насажен второй конец пружины.
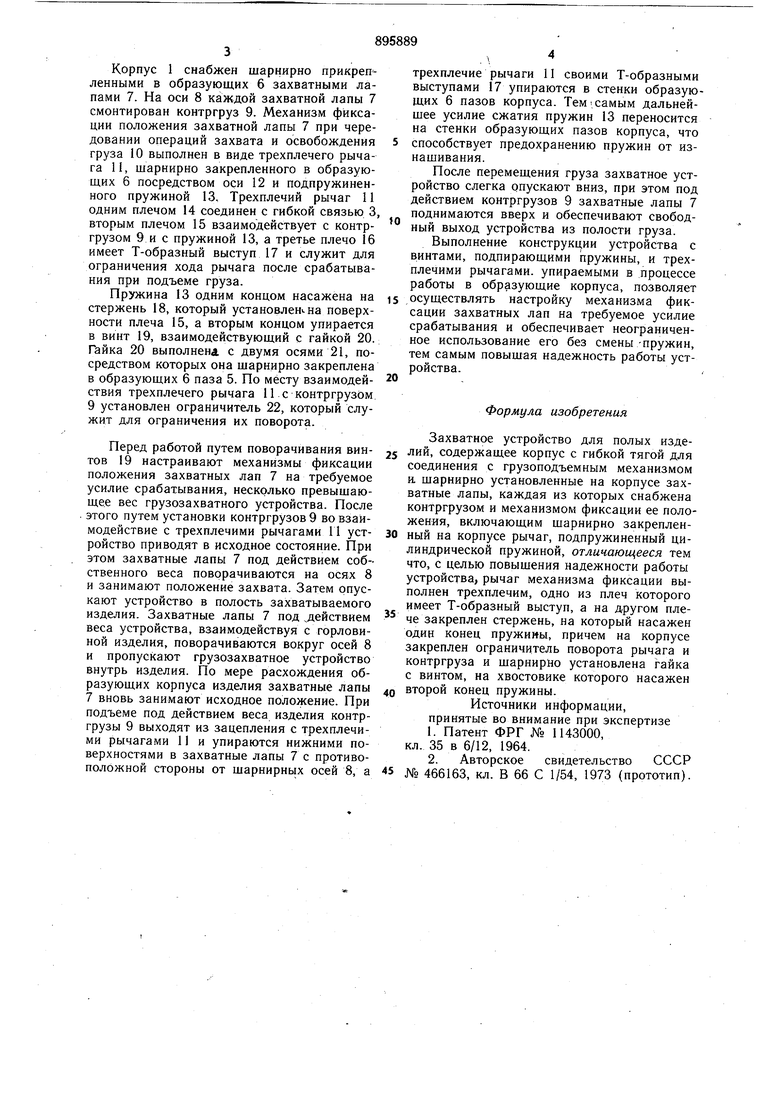
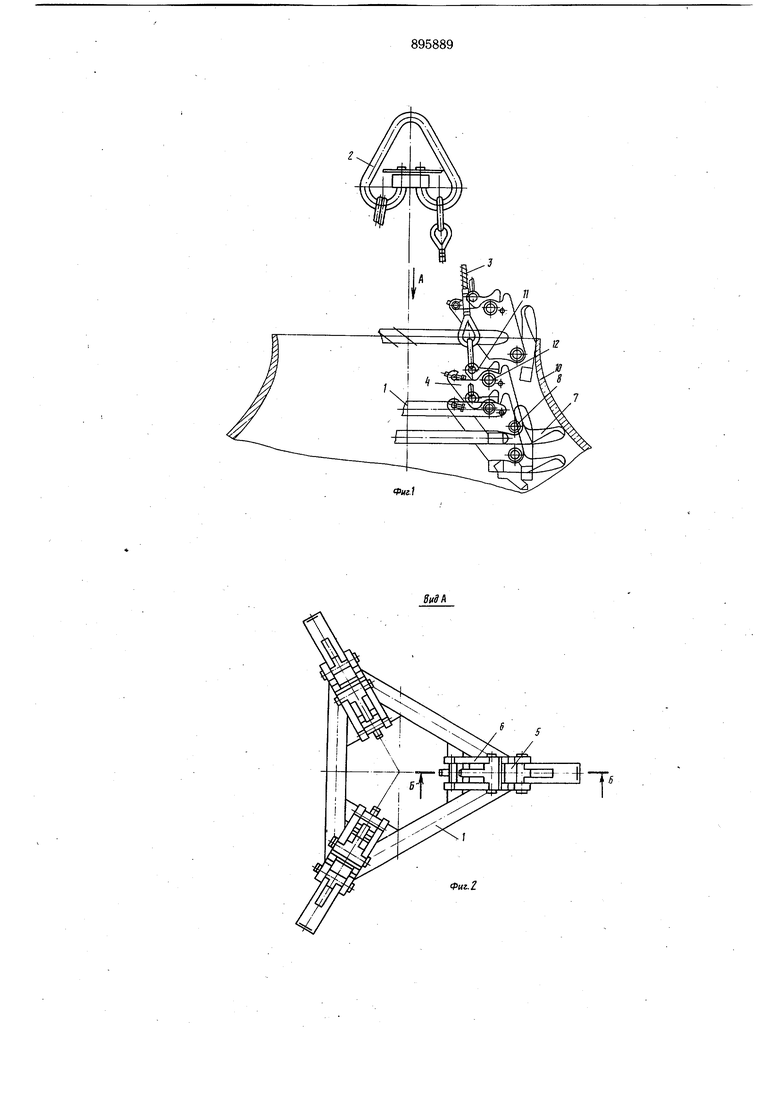
На фиг. 1 показано устройство в исходном состоянии, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на
Захватное устройство состоит из корпуса 1, соединенного со скобой 2 гибкой тягой 3. Корпус 1 выполнен в виде рамы треугольной формы с жестко закрепленными на ее схо20дящихся концах проущинами 4, каждая из которых имеет продольный паз 5, направленный своими образующими 6 к центру рамы.
Корпус 1 снабжен шарнирно прикрепленными в образующих 6 захватными лапами 7. На оси 8 каждой захватной лапы 7 смонтирован контргруз 9. Механизм фиксации положения захватной лапы 7 при чередовании операций захвата и освобождения груза 10 выполнен в виде трехплечего рычага И, шарнирно закрепленного в образующих 6 посредством оси 12 и подпружиненного пружиной 13, Трехплечий рычаг 11 одним плечом 14 соединен с гибкой связью 3, вторым плечом 15 взаимодействует с контргрузом 9 и с пружиной 13, а третье плечо 16 имеет Т-образный выступ 17 и служит для ограничения хода рычага после срабатывания при подъеме груза.
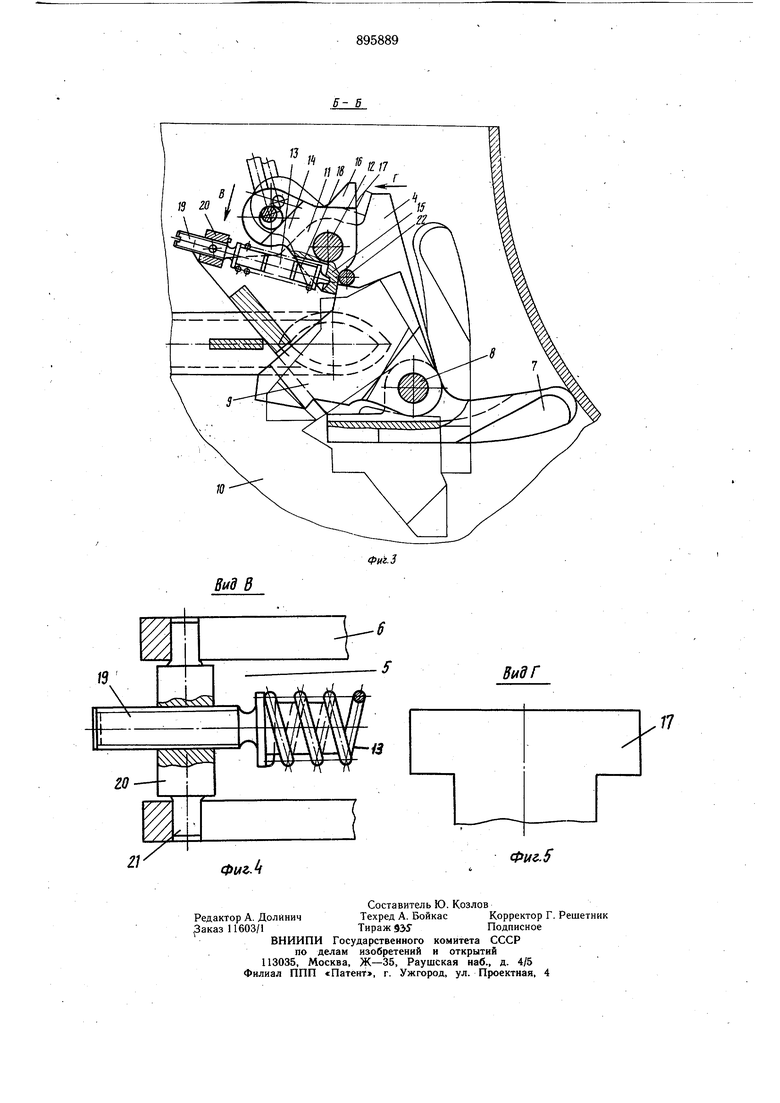
Пружина 13 одним концом насажена на стержень 18, который установлен1на поверхности плеча 15, а вторым концом упирается в винт 19, взаимодействующий с гайкой 20. Гайка 20 выполнена с двумя осями 21, посредством которых она шарнирно закреплена в образующих 6 паза 5. По месту взаимодействия трехплечего рычага 11 с контргрузом 9 установлен ограничитель 22, который служит для ограничения их поворота.
Перед работой путем поворачивания винтов 19 настраивают механизмы фиксации положения захватных лап 7 на требуемое усилие срабатывания, несколько превышающее вес грузозахватного устройства. После этого путем установки контргрузов 9 во взаимодействие с трехплечими рычагами 11 устройство приводят в исходное состояние. При этом захватные лапы 7 под действием собственного веса поворачиваются на осях 8 и занимают положение захвата. Затем опускают устройство в полость захватываемого изделия. Захватные лапы 7 под действием веса устройства, взаимодействуя с горловиной изделия, поворачиваются вокруг осей 8 и пропускают грузозахватное устройство внутрь изделия. По мере расхождения образующих корпуса изделия захватные лапы 7 вновь занимают исходное положение. При подъеме под действием веса изделия контргрузы 9 выходят из зацепления с трехплечими рычагами 11 и упираются нижними поверхностями в захватные лапы 7 с противоположной стороны от шарнирных осей 8, а
трехплечие рычаги 1I своими Т-образными выступами 17 упираются в стенки образующих 6 пазов корпуса. Тем самым дальнейщее усилие сжатия пружин 13 переносится на стенки образующих пазов корпуса, что способствует предохранению пружин от изнашивания.
После перемещения груза захватное устройство слегка опускают вниз, при этом под действием контргрузов 9 захватные лапы 7 поднимаются вверх и обеспечивают свободный выход устройства из полости груза.
Выполнение конструкции устройства с винтами, подпирающими пружины, и трехплечими рычагами, упираемыми в процессе работы в образующие корпуса, позволяет , осуществлять настройку механизма фиксации захватных лап на требуемое усилие срабатывания и обеспечивает неограниченное использование его без смены-пружин, тем самым повышая надежность работы устройства.
Формула изобретения
Захватное устройство для полых издеЛИЙ, содержащее корпус с гибкой тягой для соединения с грузоподъемным механизмом tt шарнирно установленные на корпусе захватные лапы, каждая из которых снабжена контргрузом и механизмом фиксации ее положения, включающим щарнирно закрепленный на корпусе рычаг, подпружиненный цилиндрической пружиной, отличающееся тем что, с целью повышения надежности работы устройства, рычаг механизма фиксации выполнен трехплечим, одно из плеч которого имеет Т-образный выступ, а на другом плече закреплен стержень, на который насажен один конец пружииы, причем на корпусе закреплен ограничитель поворота рычага и контргруза и шарнирйо установлена гайка с винтом, на хвостовике которого насажен 0 второй конец пружины.
Источники информации, принятые во внимание при экспертизе
