Изобретение относится-к машиностроению, в частности к манипуляторам и может быть использовано для механизации и автоматизации технологических процессов.
Цель изобретения - улучшение условий эксплуатации и повышение надежности за счет уменьшения повреждения изоляции проводов в компенсационных петлях при трении их о стенки полостей, а также за счет создания унифицированных конструкций приводов качания и поворота с размещением их в отдельных блоках.
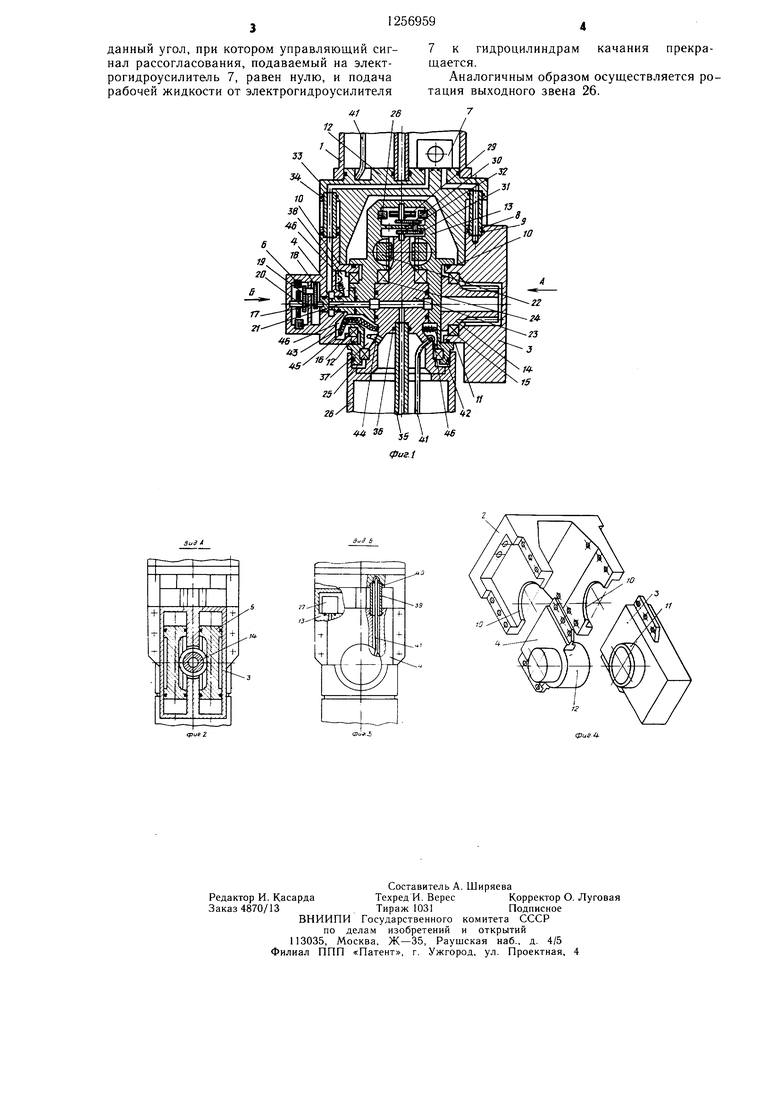
На фиг. 1 изображен шарнир манипулятора, обший вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - место крепления крышек с вилкой корпуса.
Шарнир манипулятора состоит из закрепленного на входном звене 1 ман ипулятора корпуса, выполненного в виде вилки 2, на боковых поверхностях которой смонтированы крышки 3 и 4. Внутри крышки 3 установлены гидроцилиндры привода качания, на штоках которого закреплены зубчатые рейки 5. Внутри крышки 4 установлен индукционный датчик 6 угла качания. Электрогидравлический усилитель 7 закреплен на торце вилки 2 и соединен с помощью каналов, выполненных в вилке 2 и крышке 3, а также трубок 8 с уплотнителями 9 с рабочими полостями гидроцилиндров привода качания. На вилке 2 выполнены полукруглые центрирующие расточки 10 для крышек 3 и 4, не охватывающие кругом их центрирующие пояски 11 и 12, а крепежные фланцы крышек 3 и 4 смещены относительно оси расточек 10.
Полый промежуточный элемент 13 имеет закрепленное в его корпусе со стороны крышки 3 зубчатое колесо 14, установленное в подшипниках 15 и 16, расположенных соответственно в крышках 3 и 4. При этом зубчатое колесо 14 находится в зацеплении с рейками 5, а подвижная часть датчика 6 посредством зубчатых колес 17-20 кинематически связана с цапфой 21, закрепленной на промежуточном элементе 13 соосно валу зубчатого колеса 14 привода качания.
В полости промежуточного элемента 13 размещен привод ротации, выполненный в виде двух гидроцилиндров, установленных на внутренней поверхности промежуточного элемента 13, и зубчато-реечной передачи. Рейки 22 смонтированы на штоках гидроцилиндров, а зубчатое колесо 23 смонтировано на одном валу, установленном в подшипниках 24 и 25 и жестко связанном с выходным звеном 26 манипулятора. Электрогидравлический усилитель 27 установлен на корпусе промежуточного элемента 13 и соединен с каналами, выполненными в корпусе промежуточного элемента 13 с рабочими полостями гидроцилиндров ротации. Индукционный датчик 28 угла поворота привода ротации закреплен на внутренней поверхности промежуточного элемента 13, а его подвижная
0
часть посредством зубчатых колес 29-32 кинематически связана с выходным валом зубчатого колеса 23. Подвод рабочей жидкости обеспечивается по каналам, выполненным в вилке 2, к усилителю 7, далее по трубкам 33 с уплотнителями 34, каналам и расточке, выполненной в крышке 4, кольцевой канавке и каналам цапфы 21, каналам, выполненным в корпусе промежуточного элемента 13, к усилителю 27 (не показано) и к кольцевой расточке в корпусе промежуточного элемента 13, кольцевой канавке и каналам вала зубчатого колеса 23, трубке 35 с уплотнениями 36 к выходному звену 26.
Слив рабочей жидкости выходного звена
5 26 обеспечивается по расточке и отверстиям вала зубчатого колеса 23, кольцевой полости 37, образованной промежуточным элементом 13 и выходным валом привода ротации, каналам в промежуточном элементе
,, 13, кольцевой полости 38, образованной промежуточным элементом 13 и выходным валом, каналам в крышке 4, трубке 39 с уплотнениями 40, каналам в корпусе вилки 2 к входному звену 1. Жгут проводов 41 проходит от выходного звена 26 по каналам
5 слива к входному звену 1 и включает провода от электрогидроусилителя 27 и датчиков 28 и 6 и электрогидроусилителя 7. В кольцевых полостях 37 и 38 жгут образует компенсационные петли 42 и 43, помешенные в спиральные пружины 44 и 45 соответственно.
0 Спиральная пружина 44 в.месте с проводами закреплена одним концом на корпусе промежуточного элемента 13, а другим концом - на валу зубчатого колеса 23. Спиральная пружина 45 вместе с проводами закреплена одним концом на крышке 4, а другим концом - на промежуточном элементе 13. Крепление пружин 44 и 45 выполняется, например скобаг.и 46.
Устройство работает следующим образом. К шарниру подается гидравлическое и
0 электрическое питание. В зависимости от величины сигнала рассогласования, подаваемого на электрогидравлический усилитель 7 для обеспечения поворота на заданный угол качания, усилитель 7 обеспечивает подачу рабочей жидкости к гидроцилиндрам качания, рейки 5 которых перемещаются и покачивают промежуточный элемент 13 с выходным звеном 26. При этом цапфа 21 посредством зубчатых колес 17-20 разворачивает подвижную часть датчика 6, передавая в
0 систему управления электрический сигнал, пропорциональный углу качания промежуточного элемента 13. а компенсационная петля 43 скручивается или раскручивается, в зависимости от направления покачивания промежуточного элемента 13. При этом
5 спиральная пружина 45 предохраняет изоляцию проводов от повреждения при трении о стенки. Движение промежуточного элемента 13 продолжается до ее поворота на заданный угол, при котором управляющий сигнал рассогласования, подаваемый на электрогидроусилитель 7, равен нулю, и подача рабочей жидкости от электрогидроусилителя
7 к гидроцилиндрам качания прекращается.
Аналогичным образом осуществляется ротация выходного звена 26.
12
/
f5
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ МАШИНА С МЕХАНИЧЕСКИМ ОГРАНИЧЕНИЕМ ХОДА ИСПОЛНИТЕЛЬНОГО ШТОКА | 1976 |
|
SU1840182A1 |
| Рука манипулятора | 1985 |
|
SU1337253A1 |
| МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1986 |
|
SU1839992A1 |
| БЕСШАТУННЫЙ СИЛОВОЙ АГРЕГАТ С РОТОРНЫМ РАСПРЕДЕЛЕНИЕМ | 1994 |
|
RU2126890C1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Кисть манипулятора | 1981 |
|
SU982902A1 |
| Многофункциональный активный протез руки | 1983 |
|
SU1123684A1 |
(fus 2
.
фиг
| Кисть манипулятора | 1981 |
|
SU982902A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
