12
Изобретение относится к землерой- .ным машинам, а именно к их гидроприводам.
Целью изобретения является позы- шение надежности гидравлического йри- вода за счет непрерывного .автоматического регулирования режимов работы в зависимости от нагрузки на. землеройный орган, упрощения управления, устранения стопорных режимов в работе, перегрузок и колебаний давления в гидросистеме.
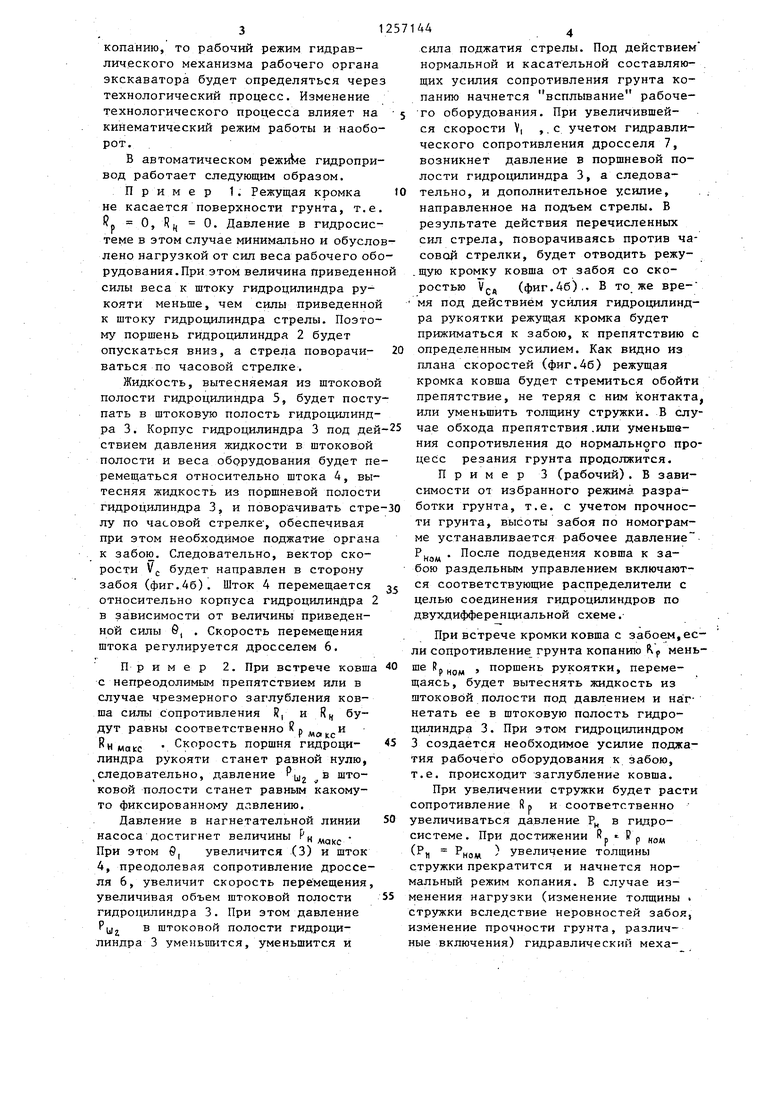
На фиг. 1 изображена принципиальная гидравлическая схема привода; на фиг. 2 - принципиальная гидрокинема- тическая схема привода; на фиг, 3 - схема гидравлического привода рабочего оборудования с автоматическим и ручным управлением; на фиг. 4 - гидрокинематит-геская схема рабочего оборудования экскаватора.
Гидравл гческий привод содержит насос 1, гидроцилиндры 2 и 3 стрелы и соединяютчй их шток 4, гидроцилиндр 5 рукояти, управляющие дроссели 6 и 7, обратные клапаны 85 гидроци
линдр 9 ковша и распределители 10-16
4
ЖИДКОСТИ.
Скорость и направление ) движения режущей кромки ковша зависит от величины и направления угловых скоростей стрелы QP и -рукойти QP 5 которые, в Свою очередь зависят от ускоряющих моментов со i(9o) (0f),
Ускоряющие моменты 5 пршшженные соответственно к стреле к рукояти, равны
30
соотношения приведенных к соответствующим звеньям моментов, обусловленных силами сопротивления копанию и усилиями гидроцилиндров. Так как давление жидкости в поршневых полостях гидроцилиндров рукоятки и стрелы одинаково, то перемещение поршня будет больше того гидроцилиндра, где нагрузка на штоке меньше.
Уравнение расходов гидропривода запишется
35
..,,,4Y,.i,
(4)
Скорость режущей кромки ковша равна (фиг. 2)
, 4|. RH go- xxo5i nao- A ;
®p° 8P5 r f« 5S -- A p а к штоку 4 приложена сила
ЧРн-1п, ..-Kg,
где
(О
(21
40
. C-VCA V,,,(5),
Из анализа уравнений (1-5) следует, что вследствие увеличения нагрузки на штоке одного из гИдроцилинд- ров (стрелы или рукояти) уменьшит- , ся расход жидкости в этом гидроциsian-V.-( х индре, но учитывая уравнение 4, при
постоянной мощности насоса в другом гидроцилиндре увеличится расход жидкости, т.е. увеличится скорость поршня другого гидроцилиндра.
Таким образом, увеличение или
уменьшение нагрузки на штоке одного
из гидроципиндров (стрелы или руко.яти) вызывает соответственно увели(Я
п.- моментf обусловлекньй силами поджатия стрелы к забою;
50
Мад,Мдр- момент приведенных к стреле и рукояти соответстЕ:енно С1ГЛ весов;
М- Mj - приведенные моментму от касательной и нормальной состав- чение или уменьшение скорости друго- ляющей силы копания; 55 ро гидроцилиндра (соответственно статические моменты сопро- кояти или стрелы). Но так как нативления относительно оси вращения стрелы и рукояти;
грузка на штоке гидроцилиндра в основном зависит от сил сопротивления
s
0
2
M.g,Mj- - приведенные динамические мо сил инерции стрелы и рукояти;
- момент вращения рукояти, обусловленный усилием ид- роцилиндра 5; РН - давление насоса;
Гп|,1у|,п,,. площади поршневой и штоковой полости соответствующих гидроцилиндров (фиг. 1);, Ру,Рд ,Рр - давление в соответствующих I полостях гидроцилиндров; Kg - коэффициент демпфирования; Fjjj - сила сопротивления перемещению поршня.
Учитывая, что при- установившемся движении динамические моменты М: и Mjp равны нулю ,M,,con5-t, MQO и Мор Мпр мощность привода постоянна, можно считать, что ускоряющие моменты
и
в основном зависят от
соотношения приведенных к соответствующим звеньям моментов, обусловленных силами сопротивления копанию и усилиями гидроцилиндров. Так как давление жидкости в поршневых полостях гидроцилиндров рукоятки и стрелы одинаково, то перемещение поршня будет больше того гидроцилиндра, где нагрузка на штоке меньше.
Уравнение расходов гидропривода запишется
35
..,,,4Y,.i,
(4)
Скорость режущей кромки ковша равна (фиг. 2)
грузка на штоке гидроцилиндра в основном зависит от сил сопротивления
копанию, то рабочий режим гидравлического механизма рабочего органа экскаватора будет определяться через технологический процесс. Изменение технологического процесса влияет на кинематический режим работы и наоборот.
В автоматическом режиме гидропривод работает следующим образом.
Пример 1. Режущая кромка не касается поверхности грунта, т.е. RP О, Rц 0. Давление в гидросистеме в этом случае минимально и обусловлено нагрузкой от сил веса рабочего оборудования. При этом величина приведенно силы веса к штоку гидроцилиндра рукояти меньше, чем силы приведенной к штоку гидроцилиндра стрелы. Поэтому поршень гидроцилиндра 2 будет опускаться вниз, а стрела поворачиваться по часовой стрелке.
Жидкость, вытесняемая из штоковой полости гидроцилиндра 5, будет поступать в штоковую полость гидродилинд- ра 3. Корпус гидроцилиндра 3 под действием давления жидкости в штоковой полости и веса оборудования будет перемещаться относительно щтока 4, вытесняя жидкость из поршневой полости гидроцилиндра 3, и поворачивать стрелу по часовой стрелке, обеспечивая при этом необходимое поджатие органа к забою. Следовательно, вектор скорости V будет направлен в сторону забоя (фиг.Аб). Шток 4 перемещается относительно корпуса гидроцилиндра 2 в зависимости от величины приведенной силы б, . Скорость перемещения штока регулируется дросселем 6.
Пример 2. При встрече ковша с непреодолимым препятствием или в случае чрезмерного заглубления ков
ша силы сопротивления R, и R будут равны соответственно 1 р д,д, и RH . Скорость поршня гидроцилиндра рукояти станет равной нулю, следовательно, давление Р в штоковой полости станет равным какому- то фиксированному давлению.
Давление в нагнетательной линии насоса достигнет величины н макс При этом в| увеличится (3) и шток 4, преодолевая сопротивление дросселя 6, увеличит скорость перемещения увеличивая объем штоковой полости гидроцилиндра 3. При этом давление РШ-, в штоконой полости гидроцилиндра 3 уменьиштся, уменьшится и
з 12571444
сила поджатия стрелы. Под действием нормальной и касательной составляющих усилия сопротивления грунта ко)0
20
й
2530
панию начнется всплывание рабочего оборудования. При увеличившейся скорости V, ,. с учетом гидравлического сопротивления дросселя 7, возникнет давление в поршневой полости гидроцилиндра 3, а следовательно, и дополнительное усилие, . . направленное на подъем стрелы. В результате действия перечисленных сил стрела, поворачиваясь против часовой стрелки, будет отводить режу- .щую кромку ковша от забоя со скоростью УС, (фиг.46).. В то же вре-- мя под действием усилия гидроцилиндра рукоятки режущая кромка будет прижиматься к забою, к препятствию с определенным усилием. Как видно из плана скоростей (фиг.4б) режущая кромка ковша будет стремиться обойти препятствие, не теряя с ним контакта, или уменьшить толщину стружки. В случае обхода препятствия .или уменьшения сопротивления до нормального процесс резания грунта продолжится.
Пример 3 (рабочий). В зависимости от избранного режима, разработки грунта, т.е. с учетом прочности грунта, высоты забоя по номограмме устанавливается рабочее давление ном После подведения ковша к забою раздельным управлением включаются соответствующие распределители с целью соединения гидроцилиндров по двухдифференциальной схеме.При встрече кромки ковша с забоем, если сопротивление грунта копанию f меньше 1 р цд„ , поршень рукоятки, перемещаясь , будет вытеснять жидкость из штоковой полости под давлением и нагнетать ее в штоковую полость гидроцилиндра 3. При этом гидроцилиндром
5 3 создается необходимое усилие поджатия рабочего оборудования к забою, т.е. происходит заглубление ковша.
При увеличении стружки будет расти сопротивление fip и соответственно
0 увеличиваться давление Р., в гидро5
0
системе,
СР Р
с г
При достижении Й„ Р
р р ной толщины
5
- HOW увеличение стружки прекратится и начнется нормальный режим копания. В случае изменения нагрузки (изменение толщины стружки вследствие неровностей забоя, изменение прочности грунта, различные включения) гидравлический мехаs ,
НИЗМ будет отрабатывать таким образом (см, пример 1 или 2), чтобы не изменялась заданная нагрузка на кромке ковша. Осуществляя непрйрыв- ное автоматическое управление режущей кромкой ковша, можно обеспечить постоянное номинальное или незначительно отличающееся от номинального в момент переходньк процессов давление в гидросистеме, исключить стопорные режимы, резкие колебания в забросы давления.
57144 « &
Для работы гидравлического привода в режиме ручного управления все гидрораспределители устанавливаются в позицию В. В этом случае жид- 5 кость от насоса 1 через гидрораспре- ,делители 10,15,11,12 и гидрораспределитель 13 соединяется со сливной полостью, т.е. при невключенных гидрораспределителях насос не загружен. К) ЛД1я приведения какого-либо звена рабочего оборудования в движение необхо- . димо включить соответствующий ему гидрораспределитель.
Wo
УС
VCB
VCA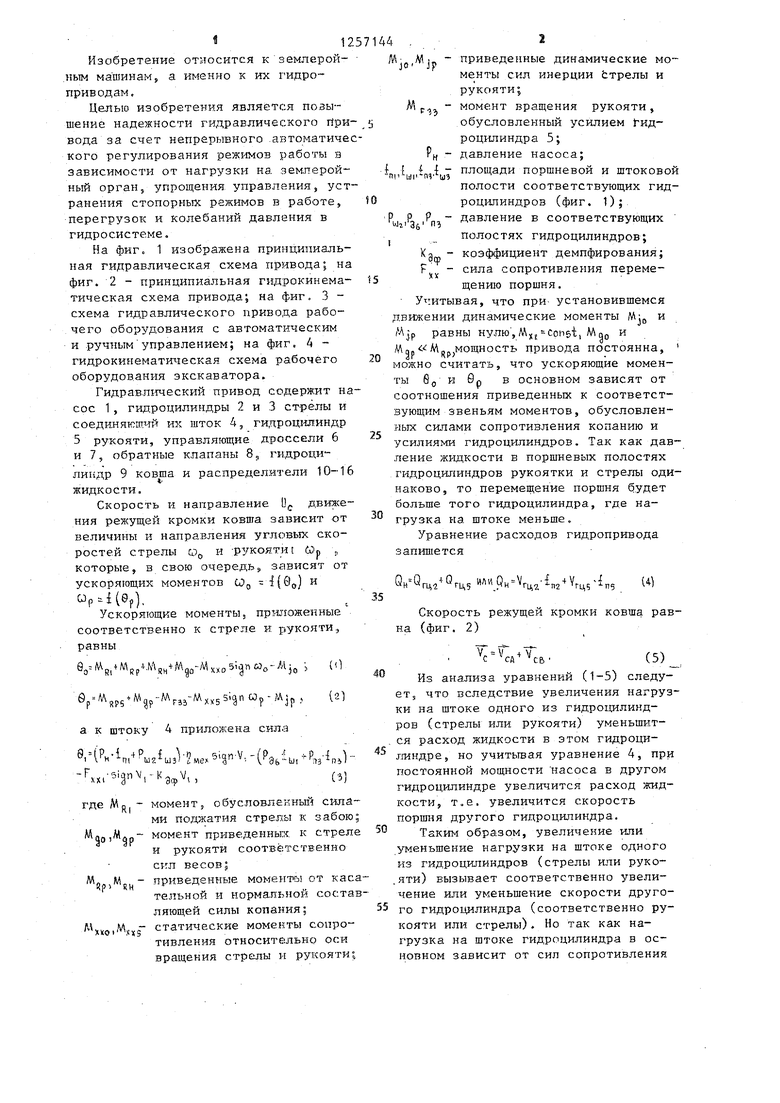
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1980 |
|
SU949091A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Стенд для испытаний одноковшовых экскаваторов | 1987 |
|
SU1469032A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1661479A1 |
| Рабочее оборудование экскаватора | 1987 |
|
SU1472587A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2010 |
|
RU2450106C1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Гидропривод одноковшовного экскаватора | 1974 |
|
SU541946A1 |
| Устройство для разгрузки стрелы гидравлического экскаватора | 2022 |
|
RU2807273C1 |


Редактор Н. Слободяник
Составитель С. Фомин
Техред М.Моргентал Корректор В, Бутяга
Заказ 4887/23Тираж 641Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1980 |
|
SU949091A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ГИДРОПРИВОД одноковшового ЭКСКАВАТОРА | 0 |
|
SU231395A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
