(5) СЛЕДЯЩАЯ СИСТЕМА ПОВОРОТА ПРОЕКТОРА КИНОТРЕНАЖЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU877472A2 |
| Устройство для управления кинотренажером | 1984 |
|
SU1275515A1 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU1029144A2 |
| Следящая система поворота проектора кинотренажа | 1972 |
|
SU451057A1 |
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU894674A2 |
| Следящая система поворота проектора кинотренажера | 1978 |
|
SU729551A2 |
| Следящая система поворота проектора кинотренажера | 1984 |
|
SU1246052A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Тренажер для обучения водителей транспортных средств | 1985 |
|
SU1257694A1 |
. 1 : ; ..- .
Изобретение относится к автоматическому регулированию и может найти применение в тренажерах для тренировки водителей транспортных средств, и является усовершенствованием следящей системы.
По основному авт. св. № известна следящая система поворота проектора кинотренажера, содержащая последовательно соединенные блок считывания топограммы, первое мно.жительное устройство, сумматор, интегратор, второе множительное устройство, суммирующий усилитель и рулевую машинку, выход которой связан с проектором, через обратную связь соединенным со вторым входом сумматора, а вторые входы множительных устройств соединены с выходом датчика скорости 1 .
Однако в этой системе не учитывается условие заноса транспортного средства, которое зависит от скорости движения и радиуса поворота.
Например, при выполнении поворота на гусеничной машине может возникнуть следующая ситуация. При движении по трассе водитель видит поворот с радиусом R, равным фиксированному радиусу поворота R, котбрый обеспечивается данной машиной. При такой скорости движения.машина впишется в данный поворот, так как центробежная сила, действующая на
10 машину, при малой скорости незначительна и не приводит к заносу машины. Если же водитель попытается провести на таком повороте машину на высокой скорости, то возникнет занос, т.е.
15 машина не впишется в заданную кривую поворота. Причем момент наступления заноса определяется не только величиной скорости, но и видом грунта (характеризуется коэффициентом сопротивления повороту Q,).
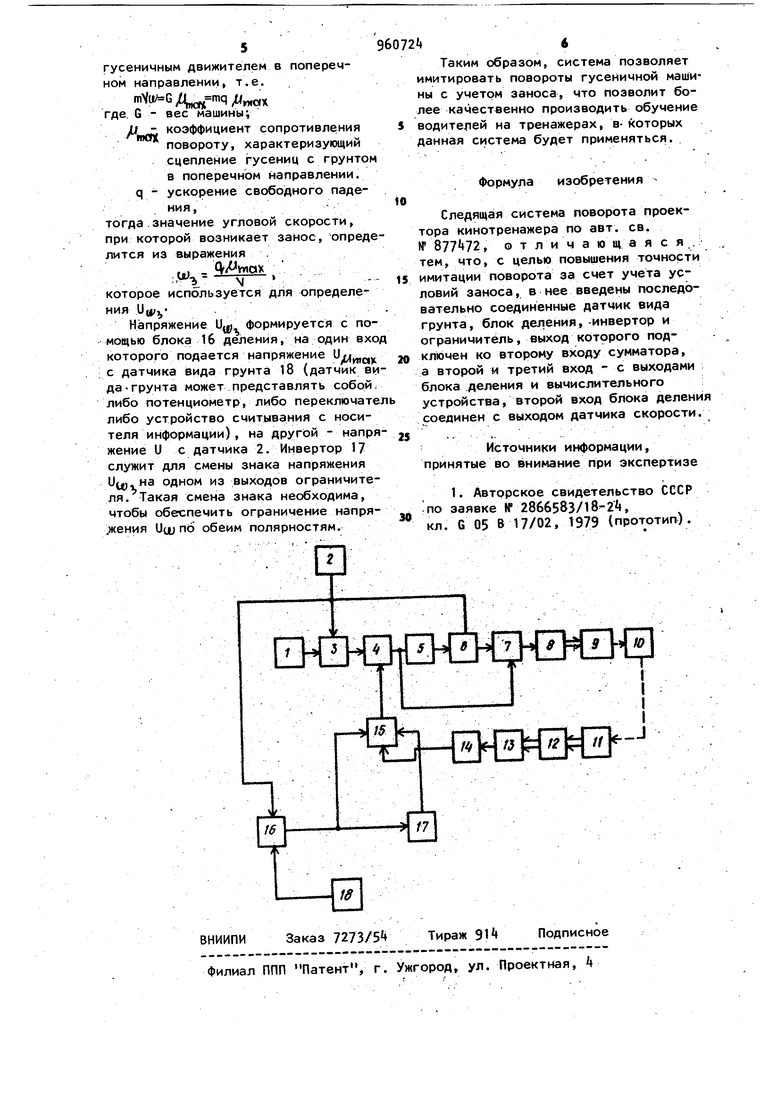
Указанная следящая система не позволяет учесть влияние заноса на имитацию поворотов. Цель изобретения - повышение точности имитации поворота за счет учета условий заноса. Поставленная цель достигается тем, что в следящую систему поворота проектора кинотренажера введены последовательно соединенные датчик вид грунта, блок деления, инвертор и ограничитель, выход которого подключен ко второму входу сумматора, а второй и третий вход - с выходами блока деления и вычислительного устройства, второй вход блока деления соединен с выходом датчика скорости. На чертеже представлена функциональная схема системы. Следящая система содержит блок 1 считывания топограммы, датчик 2 скорости прямолинейного движения, первое 3 и второе 6 множительные устрой ства, сумматор Ц, интегратор 5, суммирующий усилитель 7, рулевую машину 8, проектор 9. обратную связь (экран 10, механик-водитель 11, органы управления 12 с датчиками 13, вычислительное устройство ), ограничитель 15, блок 16 деления, инвертор 17 и датчик 18 вида грунта Следящая система «работает.следующим образом. С блока 1 считывания топограммы снимается напряжение, пропорциональное кривизне трассы. Последнее с помощью множительного устройства 3 умножается на напряжение, пропорциональное скорости прямолинейного движения, снимаемого с датчика 2 скорос ти прямолинейного движения, который может представлять собой либо потенциометр, либо устройство для моделирования динамики движения машины. На выходе первого множительного устройства 3 формируется напряжение, пропорциональное угловой скорости дороги относительно машины. С вычислительного устройства 1А, которое преобразует действия механика-водителя 11 в угловую скорость, снимается напряжение U.,,, пропорциональное угловой скорости поворота машины. Это напряжение поступает на ограничитель 15 на управляющие входы которого поступает напряжение Уцг, пропорциональное максимальной угловой скорости поворота, при ксэторой возникает занос. Если какой-либо поворот осуществляется без заноса, то U)fU,)y Следовательно, U|jynpoxoдит через ограничитель без изменения. Если при повороте возникает занос, to Ц.р U(|jy В этом случае напряжение определяет уровень ограничения напряжения U, т.е. напряжение на выходе ограничителя равно Uj,; . Для правильного выполнения поворота необходимо, чтобы напряжение, пропорциональное угловой скорости поворота дороги относительно машины, было равно напряжению, пропорциональному УГЛОВОЙ скорости поворота машины. В случае же заноса напряжение Uji; будет ограничено условием заноса (jy,. Поэтому скомпенсировать им напряжение поворота трассы нельзя. В результате будет происходить имитация съезда с трассы следующим образом. На выходе сумматора появится напряжение, пропорциональное разности иц,-иу/, которое ха- j рактеризует наличие угловой скорости машины относительно трассы. Последнее интегрируется интегратором 5 т.е. формируется напряжение, пропорциональное углу отклонения машины от трассы. После перемножения этого напряжения вторым, множительным устройством 6 на выходное напряжение датчика 2 скорости прямолинейного движения форсируетря напряжение, пропорциональное скорости отклонения машины от заданной траектории движения. Последнее с помощью сум мирующего усилителя 7 суммируется с напряжением, пропорц14ональным угловой скорости машины относительно трассы, поступающим с выхода сумматора k. Таким образом, на выходе суммирующего усилителя 7 формируется напряжение, которое с помощью рулевой машинки 8 поворачивает кинопроектор в сторону, имитируя тем самым съезд с трасс. Напряжение U, пропорциональное угловой скорости, при которой возникает занос, определяющее уровень ограничения напряжения U,, пропор-, циональнОго угловой скорости машины, формируется следующим образом. Центробежная сила, возникающая noBojjOTe, равна m{tn(mv{V, где m - масса машины; Ц - угловая скорость поворота; R - радиус поворота; V - линейная скорость машины. Центробежная сила уравновешивается, силой сцепления грунта с
