(54) СЛЕДЯЩАЯ СИСТЕМА ПОВОРОТА ПРОЕКТОРА
1
Изобретение. относится к автоматич скому регупированшо и может найти- применение в тренажерах для трешфовки во дителей транспортных средств.
По основному авт, св. № 451057 известна следящая система поворота проек- 5 тора кинотренажера, содержащая блок считывания топограммы, сумматор, первое глвожктелъное устройство, рулевую машинку, кинопроектор,- экран механика-водителя, рычаги управления, датчик поворота Ю и усилительное устройство, выход которого соединен со вторым входом сумматора, выход датчика скорости прямолинейного движения соединен со вторым входом jnepвого множительного устройства ИЗ 5
Недостатком этой системы является то, что в ней проектор поворачивается с угловой скоростью, пропорциональной напряжению, подаваемому на вход рулевой машинки, а поэтому изображение на экра- 20 не смещается относительно обучаемого водителя на величину угла поворота, что не соответствует реальным условиям. КИНОТРЕНА:Л ЕРА
так как при повороте на реальной машине водитель ориентируется, в основном, не на угол поворота машины, а на величину бокового смещения машины относительно какого-либо ориент1фа, выбранного водителем на корпусе машины, поэтому на тренажере у обучаемого создается впечатление движения по прямой боком.
Цель изобретения - расширение функциональных возможностей системы за счет одновременной имитации поворота и отклонения от заданной траектории движения при управлении но угловой скорости.
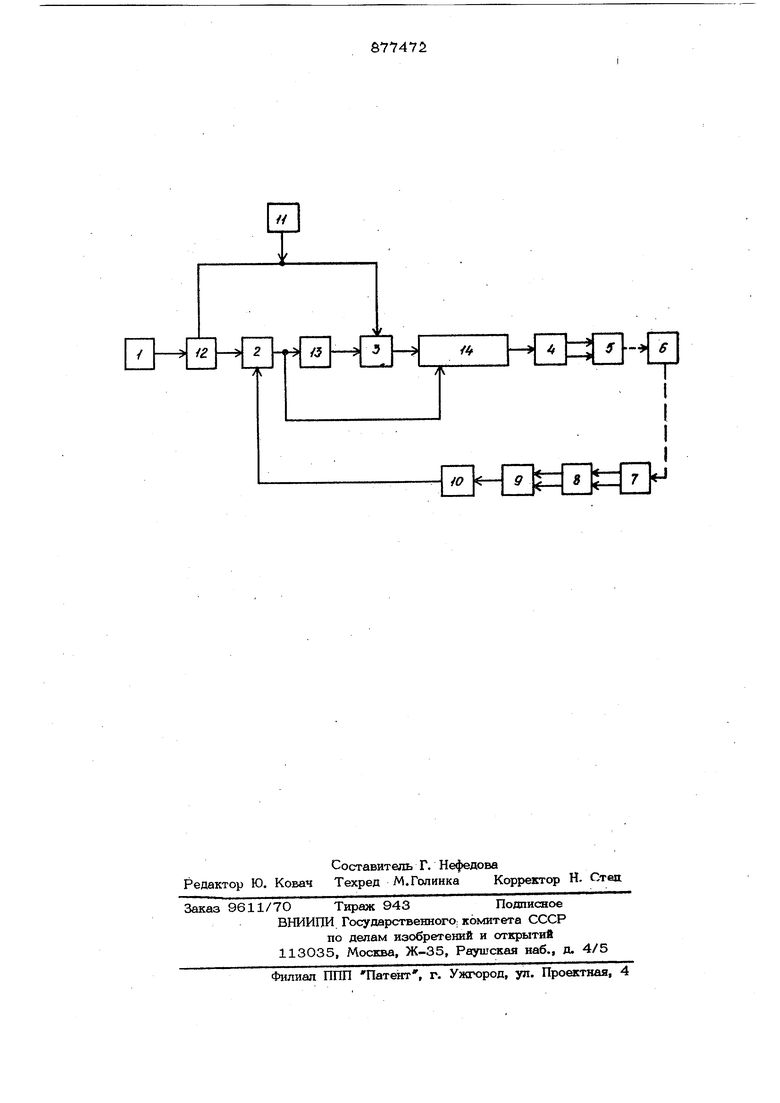
Поставленная цель достигается тем, что в системе установлены второе множительное устройство, интегратор и суммируюший усилитель, причем выход сум-, матора соединен с первым входом первого множительного устройства через интегратор, выход первого множительного устройства соединен со входом рулевой машинки через суммирующий усилитель, второй вход которого соединен с выходом сумматора, выход блока считьгаания топограм мы соединен с первым входом сумматора через второе множительное устройство, второй вход которого соединён с выходом датчика скорости прямолинейного движения. На чертеже приведена функциональная схема предлагаемой системы. Система включает блок 1 считьгеания топограммы, сумматор 2, первое множительное устройство 3, рулевую машинку 4, кинопроектор 5, экран 6, механикаводителя 7, рычаги 8 управления, датчик 9 поворотов, усилительноеустройство 10 датчик 11 скорости прямолинейного движения, второе множительное устройство 12, интегратор 13 и суммирующий усилитель 14. . Следящая система работает следующим образом. С блока 1 считьгоания топограммы сни мается напряжение, пропорциональное кривизне заснятой трассы, последнее с помощью второго множительного устройства 12 умножается ни напряжение, пропорцио нальное скорости прямолинейного движения, снимаемого с датчика 11 скорости прямолинейного движения. На выходе второго множительного устройства 12 форми руется напряжение, пропорциональное угло вой скорости поворота дороги относительно мащины. С усилительного устройства 10, которое преобразует действия механика-водителя 7 в угловую скорость машины, снимается напряжение, пропорциональное угловой скорости машины, при этом на .выходе сумматора 2 возншдает напряжение, пропорциональное разности угловых скоростей дороги и машины. Последнее интегрируется с помощью интегратора13, т.е. формируется напряжение пропорциональное углу отклонения машины от заданной траектории движения. После перемножения этого напряжения пёрвьШ мнбжйтельным устройством 3 на выходное напряжение датчика 11 скорост прямолинейного движения формируется напряжение, пропорциональное скорости отклонения машины от заданной траектории движения. Последнее с помощью суммирую щего усилителя 14 суммируется с напряжением, пропорциональным угловой скорости машины, поступающим с выхода сум матора 2. Таким образом, на выходе суммирующего усилителя 14 формируется напряжение, пропорциональное угловой скорости поворота кинопроектора 5. Это напряжение поступает на вход рулевой машинки 4, которая сообщает проектору 5 необходимую угловую скорость поворота. Таким образом, угловая скорость поворота кинопректора 5, а следовательно, и величина смещения изображения на экране 6 одновременно зависят от величины угла поворота и отклонения мащИны от заданной траектории движения. Кроме того, предлагаемая система может работать с усилительным у1слройством 10, которое формирует угловую скорость машины. Предлагаемая система за счет указанных выше отличительных признаков позволяет осуществлять одновременную имитацию поворота и отклонения от заданной траектории движения при управлении по угловой скорости, что значительно расширяет функциональные возможности тренажера для обучения механиков-водителей. Фор м у ла изобретения Следящая система поворота проектора кинотренажера по авт. св. № 451О57, отличающая с-я тем, что, с целью расширения функциональных возможностей системы, в ней установлены второе множительное устройство, интегратор и суммирующий, усилитель, причем выход (Сумматора соединен с первым входом первого щожительнрго устройства через интегратор, выход первого множительного устройства соединен с входом рулевой, машинки через суммирующий усилитель, второй вход которого соединен с выходом сумматора, выход блока считывания топограммы соединен с первым входом сумматорачерез второе множительное устройство, второй вход которого соединен с выходом датчика скорости прямолинейного движения. Источники информации, принятые во внимание при экспертизе 1, Автроское свидетельство СССР № 451057, кл. G05 В 17/02, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU960724A2 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU1029144A2 |
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU894674A2 |
| Следящая система поворота проектора кинотренажера | 1984 |
|
SU1246052A2 |
| Следящая система поворота проектора кинотренажера | 1978 |
|
SU729551A2 |
| Следящая система поворота проектора кинотренажа | 1972 |
|
SU451057A1 |
| Устройство для управления кинотренажером | 1984 |
|
SU1275515A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Тренажер для обучения водителей транспортных средств | 1980 |
|
SU985818A1 |
| Тренажер для обучения водителей транспортных средств | 1985 |
|
SU1257694A1 |