Изобретние относится к автоматик и может найти применение в устройствах для тренировки водителей транспортных средств. По основному авт. св. 877472 известна сзледящая системаПоворота проектора Кинотренажера, содержащая датчик скорости прямолинейного движения и последовательно соединенные блок считывания топограмм, первое множительное устройство, первый сумматор, первый интегратор второе множительное устройство, сум мирующий усилитель , рулевую машинку выход которой связан с проектором, через обратную связь соединенным с вторым входом первого 0,yN MaTopa, вы ход которого соединен с вторым входом суммирующего усилителя, а выход датчика скорости прямолинейного движения одновременно соединён с вторыми вхЬдами первого и второго множительных устройств. При применений данной системы в жренажере для вождению транспортных средств инструктор, производящий обучение, должен оценивать величину отклонения транс портного средства от заданной траектории движения,чтобы оценить,, к чество вождения обучаемого во цителя 1. ... Однако в данной системе это осуществить невозможно, так как на.выт ходах блоков сиетеми нет напряжения пропорционального отклонению транспортного .средства от заданной траек тории, а на выходе второго.множительного устройства имеется напря.жение, пропорциональное скорости . отклонения, а не величине отклонения... ; Целью изобретения является расшир ние функциональных возможностей за счет обеспечения возможности регист рации отклонения имнтируемого транспортного средства от заданной траектории движения. Поставленная цель достигается . тем, что в следящую систему поворо.та проектора кинотренажера дополнительно введены компаратор, второй интегратор,.датчик отклонения проек тора от траектррии и цоследова- . ; тельнр соединенные второй сумматор инвертор и коммутатор, выход которо го соединен, с первым входом второг интегратора, второй вход которого соединен с .вторым.выходом первого множительного устройства, а выход с.первым входом второго сумматора в.торой вход которого подключен к выходу датчика отклонения проеато.ра от траектррии;, вход компараторр соединен с выходом первого интегратора, а выход - с управляющим входом коммутатора. На чертеже изображена функциональная схема устройства. Система содержит блок считывания „топограммы. 1, датчик скорости прямолинейного движения 2, второе множительное устройство 3, инвертор 4, коммутатор 5,-компаратор 6, первый сумматор 7., первый интегратор 8, второй сумматор-9, второй индегратор 10, первое множительное устройство 11, суммирующий усилитель 12, рулевую машину 13, датчик отклонения проектора от траектории 14, проектор 15, обратную связь, в состав котОрой входит экран 1б, обу чаемый водитель 17, органы управлеповорота 18, датчики органов управления 19, вычислительное устройство 20, Блок считывания тоцограммы i через последовательно соединенные Bzopoe множительное устройство 3, первый сумматор 7, первый интегратор 8, первое множительное устройство 11 и суммирующий усилитель 12 соединен с рулевой машинкой 13, связанной одновременно с датчиком отклонения проектора от траектории 14 и проектором 15, через обратную связь соединенным с вторым входом первого сумматора 7, выход котррого. соединен с вторым входом суммирующе; гоусилителя 12. Датч.ик прямолинейного движения 2 одновременно соединен с вторыми Входами первого 11 и второго 3 множительных устройств, выход первого 11 множительного устройства.через последовательно, соединенные второй.интегратор 10, второй сумматор-9 и инвертор 4 соединен с входом коммутатора .5, выход которого соединен с .первым; входом второго интегратора 10. Выход первого интегратора 8 через компаратор б соединен с управляющим входом кокмутатора 5, а датчик отклонения проектора 6т траектории 14 .соединен с вторым входом сумма ; тора 9. Устройство работает следукщим .образом. .С блока считывания топограммы 1 снимается напряжение, пропордцио нальное кривизне заснятой трассы. Последнее с -помощью множительного устройства 3 умножается.на напрят жение, пропорциональное скорости, прямолинейного .движения, снимаемого с датчика скорости прямолинейного движения 2, На выходе множительного . устройства 3 формируется .тапряжение, пропорциональное угловой скорости поворота дороги относительно машины.. С вычислительного устройства 20, которое преобразует действия водителя 17 в угловую скорость машины снимается напряжеие, пропорциональное угловой скоости машины, при этом на выхода сумматора 7 возникает напряжение,;, ропорциональное разности, угловвк СКОРОСТЕЙ дороги и машины. Последа нее интегрируется первым интегратором 8, т.е. формируется напряжение, ропорциональное углу отклонения ашины.от заданной траектории движе кия..
После перемножения этого напряения множительным устройством 11 на выходное напряжение датчика скорости прямолинейного движения 2 формируется напряжение, пропорциональное скорости отклонения маины от заданной траектории движения, последнее с помощью суммирующего усилителя 12 суммируется с напряжением, пропорциональным угловой скорости машины, поступаюим с выхода первого сумматора 7. Таким образом, на выходе сумйнг рукадегр усилителя 1;2 формируется напряжение, пропорциональное угловой скорости поворота проектора 15. Это напряжение поступает на;вход рулевой машинки 13,: которая сообйа щает .проектору 15 необходимую . угла вунэ .скорость.
Таким образом, угол поворотаi проектора 15, а следовательно, и величина смещения иэображения на экране.16 Одновременно зависят от величины угла поворота и отклонения машины от заданной траекто™, РИ1 движения. .
При работе:.данной системы в кино тренажере для обучения водителей транспортных средств необходимо постоянно контролировать величинуотклонения машины от заданной траекторий..
. Для этой цели напряжение, пропорциональное скорости отклонения от заданной трассы с выхода множительного устройства 11, интегрируется с помощью второго интегратора 10, в результате -на его выходу формируется напряжение пропорциональное величине отклонения машины от заданной траектории. ,Это напряжение можно регистрировать с помощьюразличных измерительных приборовj . например вольтметра , осцилографа или самописца. Однако ввиду тосо, что интегратор 10 собран на операционном усилителе и резисторах с конденсатором, то, во-первых, наличие определенных допусков на эти элементы не позволяет точно соблюд дать равенство между постоянной времени, рулевой машийки и интегратора 10, во-вторых, операционным усилителям присущ дрейф нуля, что приводит к самозаряду интегратора.
Таким образом,использование ; только интегратора 10 для определе-.
ния величины отклонения приводит к большим погрешностям. Поэтому в системе П1редусмотрена коррекция погрешности интегратора 10.
Данная коррекция основана на том, что при моделируемом угле отклонения машины от заданной траектории, равным нулю (т.е. напряжение--на вы ходе первого интегратора 8 -равно нулю), угол поворота кинопроектора
0 15 равен величине отклонения от заданной траектории. В этом случае напряжение с выхода датчика откло1 е ния проектора от траектории.14 пропорционально величине откло. машины
5 от заданной траектории движения. Этр напряжение на втором сумматоре 9 сравнивается с выходным напряже- : кием второго интегратора 10. .
В результате на выходе второго сумматора 9. формируется йапряжениё,
0 пропорциокальаое,погрешности выходного напр5{жения интегратора Ю отно сительно отклонения проектора 15.
Напряжение, пропорциональное погрешности интегратора 10, поступ.- .
5 пает через инвертор 4 и коммутатор 5 на первый вход второго интегратора 10 с противоположным знаком . напряжению с выхода сумматора 9, Иу воздейсггвуя на этот вход, измен
0 няет выходное напряжение в.торогр интегратора до тех pop, пока последнее не сравняется с напряжением с датчика 14 отклонения проектора от траектории. Чтобы коррекция происхо5дила быстро, постоянную времени . интегрирования по первому входу интегратора 10 выбирают -значительно меньше, чем по второму входу.
Коммутатор.5 включен только в том случае, если напряжение с выхода
0 первого интегратора 8 равно нулю, т.е. при совпадении угловых скорое теи траектории и машины. Для управления коммутатора 5 исл пользуется компаратор.«б, который
5 включается при: наличии нулевого напряжения с соответствующим допуском на выходе первого интегра- .. тора 8. Если напряжение не равно нулю, то коррекция не Qc-уществ0ляет.ся, так как коммутатор 5 ра- . зомкнут. .
Исходя из того, что цель водителя управлять машиной так, чтобы она двигалась точно, по трассе, то
5 при этом напряжение, -пропорциональ ное углу поворота машины относительно трассы движения, равно нулю док вольно часто, а следовательно, и коррекция производится практически
0 во всем процессе движения.Таким .образом, предлагаемая си-стема позволяет качественно имитировать повороты транспортного средства и количественно оценивать, величину отклонения имитируемой маши5
51029144
ны от эаяамной траектории движения,нию расхода моторесурса учебных
что повышает, методические возможное-машин и горюче-смазочных материатн треягикераг для которого исполь лов за счет сокращения врё зует.ся предлагаемая система. Это,мени обучения на учебных мав свою очередь, приводит к сокраще-шинах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU877472A2 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU960724A2 |
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU894674A2 |
| Следящая система поворота проектора кинотренажера | 1984 |
|
SU1246052A2 |
| Следящая система поворота проектора кинотренажера | 1978 |
|
SU729551A2 |
| Следящая система поворота проектора кинотренажа | 1972 |
|
SU451057A1 |
| Устройство для управления кинотренажером | 1984 |
|
SU1275515A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Тренажер для обучения водителей транспортных средств | 1985 |
|
SU1257694A1 |
| Тренажер для обучения водителей транспортных средств | 1980 |
|
SU985818A1 |
СЛЕДЯЩАЯ СИСТЕМА ПОВОРОТА : nPOEKTOt A КИНОТРЕНАЖЕРА по авт . СВ. , №877472/ о т л и ч а ю щ а я с я тем, что, с целью расашрения функ;циональных возможностей за счет обес печения .возможности регистрации о.тклонения имитируемого транспортного средства от заданной -траектории- она дополнительно содержит компаратор, второй интегратор, датчик отклонения проектора от траектории и последовательно соединенные второй суматор,.инвертор.и коммутатор, выход которого соединен с первым входе дом второго интегра.тора, второй вход которого соединен с выходом первого множительного устройства, а выход с п-ервым входом второго сумматбра, второй вход которого подключен К; выходу датчика отклонения проектора от траектории, вход компаратора соединен с выходом первого интегратора, а выход - с управляющим входом коммутатора . , W с ьо со j 4 ЗмеКауаческая oSw HexeHuufcKtg fyjt. - Onmuwaaiji cua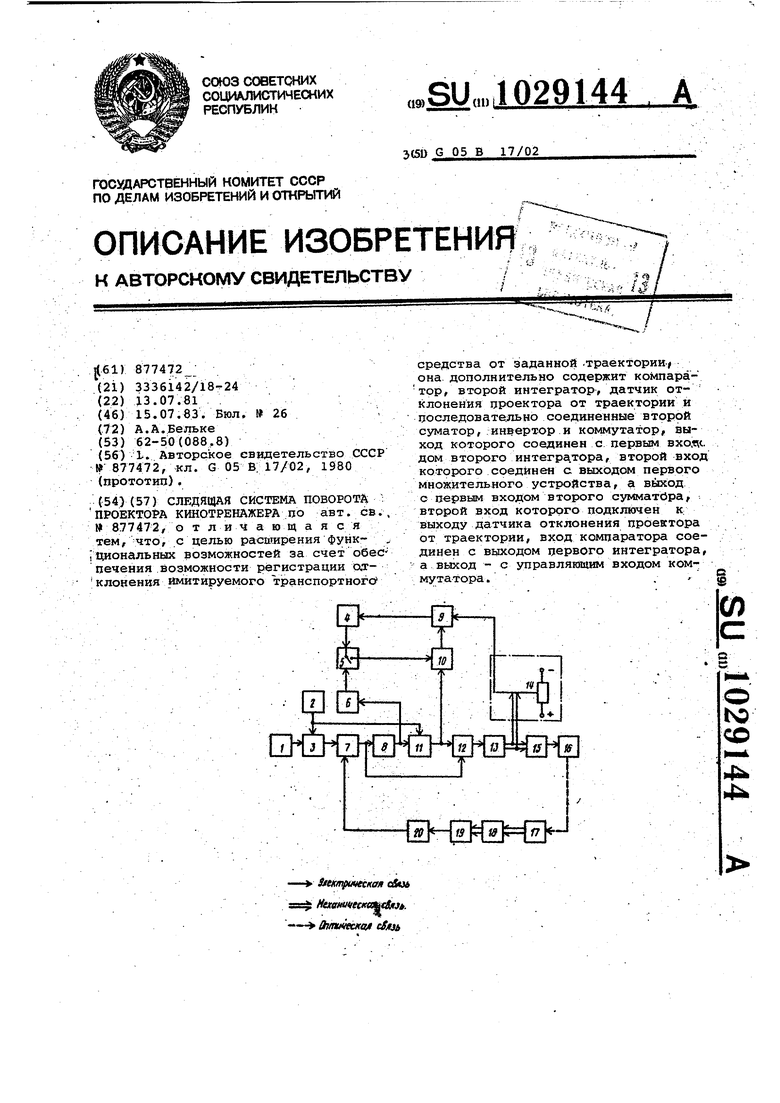
| L | |||
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU877472A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
