Изобретение относится к уборочной сельскохозяйственной технике и предназначено для использования в уборочных комбайнах, имеющих пневмотранспортную систему, в частности в хлопкоуборочных.
Цель изобретения - повышение точное- ти управления.
На чертеже представлена структурная схема устройства.
Автоматический регулятор скорости содержит датчик загрузки, выполненный в виде ю датчика 1 давления (разрежения), например мембранного типа, соединенный с всасывающими воздуховодами 2, расположенными между шпиндельными барабанами 3 и вентилятором 4 пневмотранспортной системы, в состав которой входит еще бункер 5, сое- 5 диненный нагнетательным воздуховодом 6 с вентилятором 4. Датчик 1 через усилитель 7 связан с исполнительным механизмом 8, выход которого через механизм 9 необлятором 4 зависит от производительности шпиндельных барабанов 3, т.е. от количества хлопка, идущего по указанному воздуховоду. Поэтому при постоянной частоте вращения вентилятора 4 (а это является обязательным технологическим условием) по сигналу датчика , который измеряет разрежение во всасывающих трубопроводах 2, можно определить производительность шпиндельных барабанов 3. Сигнал датчика 1 через усилитель 7 подается на исполнительный механизм 8, крутящий момент от которого через механизм 9 необратимого движения (например, редуктор с большим передаточным числом) и фрикционный элемент 10 передается на орган 11 ручного управления и жестко связанный с ним механизм 12 изменения передаточного числа бесступенчатой трансмиссии 13.
Устройство настраивается на определенное разрежение в воздуховодах 2 между
ратимой передачи и фрикционный элемент 10 д шпиндельными барабанами 3 и вентилято- соединен с органом 1 1 ручного управления,ром 4. При увеличении разрежения от этого
при
жестко связанным с механизмом 12 изменения передаточного числа бесступенчатой трансмиссии 13.
Регулятор работает следующим образом.
уровня, т.е. при прохождении участка с повышенной урожайностью передаточное число трансмиссии 13 увеличивается, а скорость комбайна соответственно снижается.
Ручное управление осуществляется от ор- 25 При уменьшении разрежения, т.е. при прогана 11 ручного управления через жесткую связь с механизмом 12 изменения передаточного числа трансмиссии. При этом фрикционный элемент 10 фиксирует орган 11 ручного управления в заданном положении.
хождении участка с пониженной урожайностью передаточное число трансмиссии 13 уменьшается, а скорость комбайна соответственно увеличивается. Этим обеспечивается максимально возможный съем хлопка при раВ режиме автоматического управления 30 боте с переменной скоростью движения
устройство работает следуюшим образом.
При работе пневмотранспортной системы
разрежение во всасывающих воздуховодах 2
между шпиндельными барабанами 3 и вентиуиравления по принципу снижения скорости на участках с повышенной урожайностью и увеличения - на участках с пониженной урожайностью.
лятором 4 зависит от производительности шпиндельных барабанов 3, т.е. от количества хлопка, идущего по указанному воздуховоду. Поэтому при постоянной частоте вращения вентилятора 4 (а это является обязательным технологическим условием) по сигналу датчика , который измеряет разрежение во всасывающих трубопроводах 2, можно определить производительность шпиндельных барабанов 3. Сигнал датчика 1 через усилитель 7 подается на исполнительный механизм 8, крутящий момент от которого через механизм 9 необратимого движения (например, редуктор с большим передаточным числом) и фрикционный элемент 10 передается на орган 11 ручного управления и жестко связанный с ним механизм 12 изменения передаточного числа бесступенчатой трансмиссии 13.
Устройство настраивается на определенное разрежение в воздуховодах 2 между
шпиндельными барабанами 3 и вентилято- ром 4. При увеличении разрежения от этого
при
уровня, т.е. при прохождении участка с повышенной урожайностью передаточное число трансмиссии 13 увеличивается, а скорость комбайна соответственно снижается.
хождении участка с пониженной урожайностью передаточное число трансмиссии 13 уменьшается, а скорость комбайна соответственно увеличивается. Этим обеспечивается максимально возможный съем хлопка при работе с переменной скоростью движения
уиравления по принципу снижения скорости на участках с повышенной урожайностью и увеличения - на участках с пониженной урожайностью.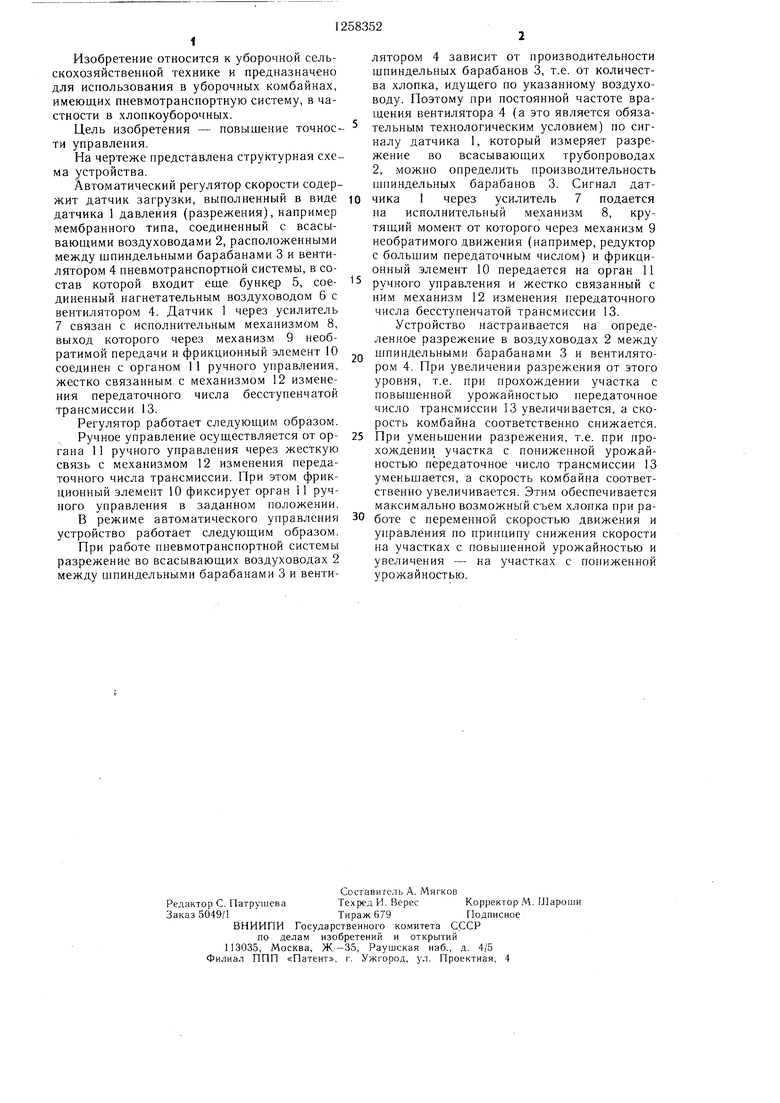
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор скорости | 1986 |
|
SU1378895A1 |
| Привод рабочих органов хлопкоуборочной машины | 1980 |
|
SU931126A1 |
| Устройство для комбинированного управления бесступенчатой трансмиссией самоходного сельскохозяйственного агрегата | 1980 |
|
SU1022825A1 |
| Устройство для автоматического регулирования загрузки самоходной уборочной машины | 1985 |
|
SU1412638A1 |
| Устройство для автоматического управления режимами работы двигателя уборочных машин | 1980 |
|
SU869593A1 |
| "Хлопкоуборочная машина "Сауле" | 1989 |
|
SU1819525A1 |
| Хлопкоуборочная машина | 1989 |
|
SU1768066A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ КОМБАЙН | 2008 |
|
RU2387121C1 |
| Система управления двигателем и бес-СТупЕНчАТОй ТРАНСМиССиЕй ТРАНСпОРТНОгОСРЕдСТВА | 1978 |
|
SU844398A1 |
| Хлопкоуборочная машина | 1979 |
|
SU869640A2 |

| 0 |
|
SU184037A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
