Изобретение относится к промышленному транспорту, а именно к вертикальному конвейеру для штучных грузов.
Цель изобретения - повышение надежности работы путем увеличения прочности соединения грузонесуш,их платформ с тяговыми цепями.
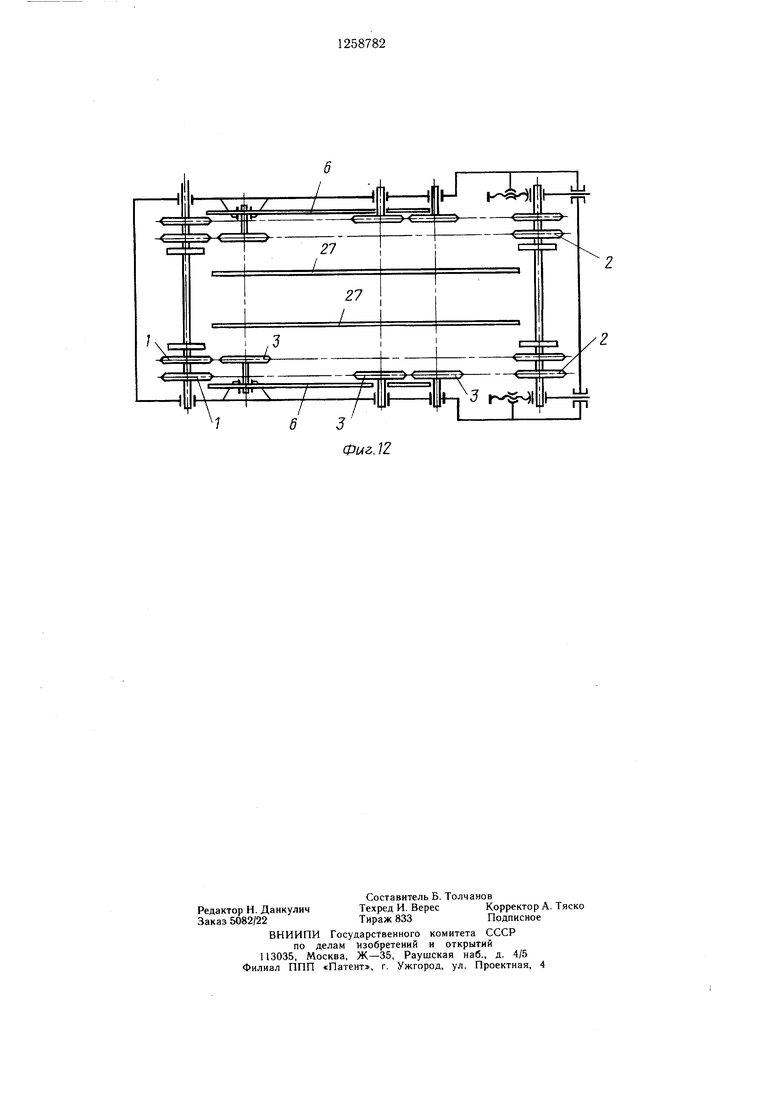
На фиг. 1 изображена общая схема вертикального конвейера, вид сбоку; на фиг. 2 - тяговая цепь со звеном, снабженным пальцем большего диаметра, чем валик тяговой цепи; на фиг. 3 - тяговая цепь со звеном, снабженным пальце.м; на фиг. 4 - тяговая цепь с местным разрезом; на фиг. 5 - звездочка с большой впадиной; на фиг. 6 - тяговая цепь со звеном, снабженным валиком с дисками на концах; на фиг. 7 - разрез А-А на фиг. 6; на фиг. 8 - тяговая цепь со звеном, снабженным роликом, диаметр которого соответствует размерам большой впадины звездочки; на фиг. 9 - положение звена тяговой цепи при попадании его ролика в большую впадину звездочки; на фиг. 10 - изображена грузонесушая платформа с дополнительными опорными катками, вид сбоку; на фиг. 11 - грузонесу- щая платформа, вид сверху; на фиг. 12 - схема конвейера, вид сверху.
Вертикальный конвейер для транспортирования штучных грузов состоит из приводных 1, натяжных 2 и отклоняюш,их 3 звездочек, четырех тяговых цепей 4, грузонесу- ших платформ 5, горизонтальных направляю- ших 6, вертикальных направляющих 7, за- грузочно-разгрузочных устройств 8, натяжного устройства и приводной станции.
Грузонесущие платформы 5 соединены с тяговыми цепями 4 посредством пальцев 9, диаметр которых больше, чем диаметр валиков 10 тяговых цепей 4.
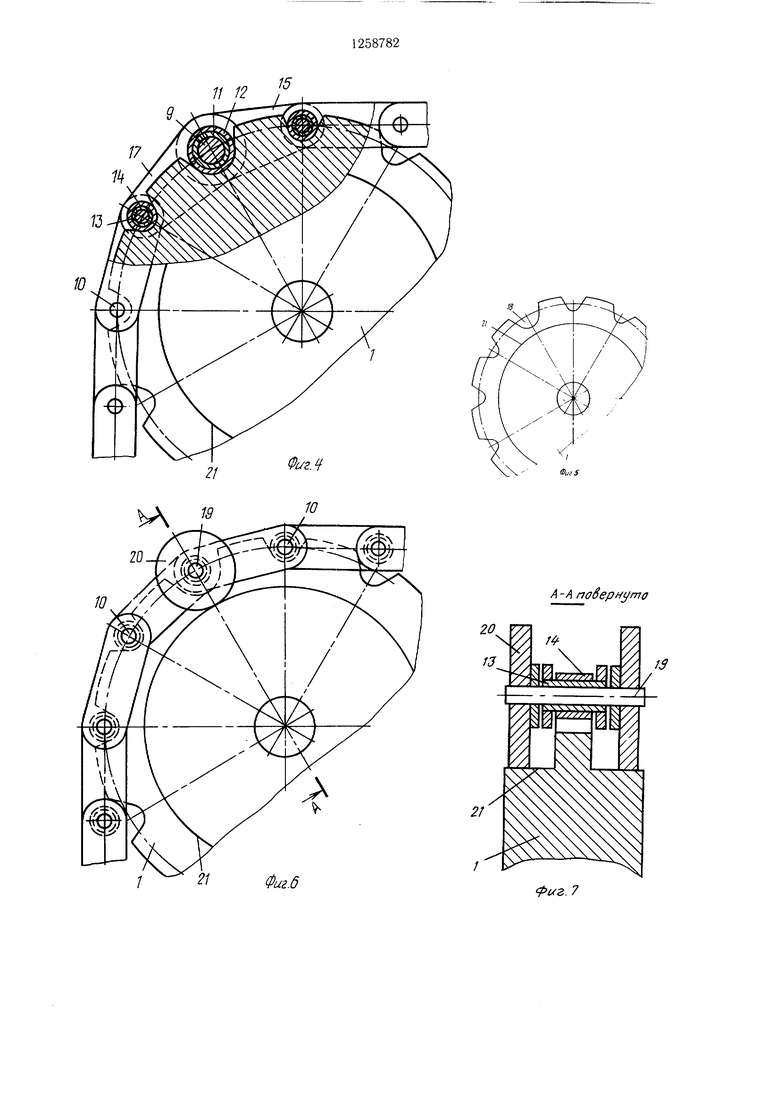
Втулки 11, в которых установлены пальцы 9, и ролики 12, установленные на втулках 11, имеют соответственно большие наружные и внутренние диаметры, чем втулки 13 и ролики 14 тяговых цепей 4.
Наружные пласт-ины 15 и 16, соединенные одним концом с пальцем 9, и внутренние пластины 17, соединенные одним концом с втулкой 11, имеют большую ширину, чем наружные и внутренние пластины тяговых цепей 4.
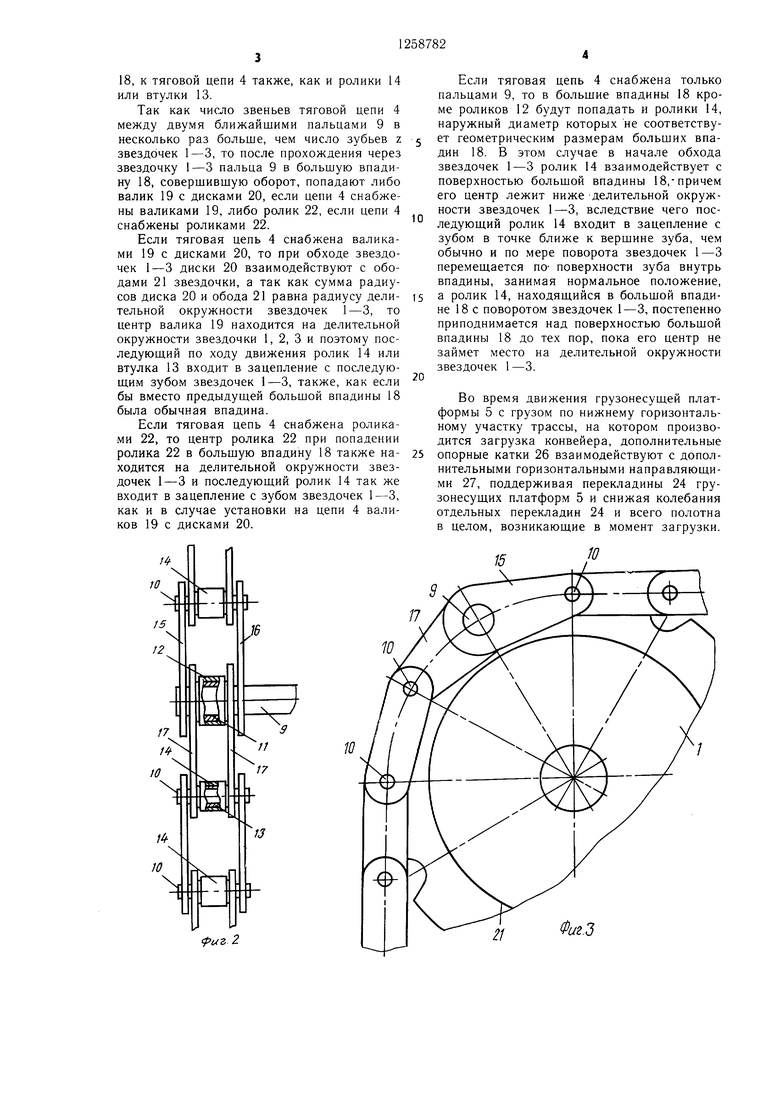
На каждой звездочке 1-3 выполнено по одной большой впадине 18, геометрические размеры которой соответствуют наружному диаметру ролика 12, в случае использования роликовых тяговых пластинчатых цепей, или втулки 11, в случае использования втулочных тяговых пластинчатых цепей.
Все звездочки I-3 имеют одинаковое число зубьев г. Все тяговые цепи 4 имеют одинаковое число звеньев кратное числу зубьев г звездочки. Число звеньев тяговой це
пи 4 между двумя ближайшими пальцами 9 также кратно числу зубьев z звездочки.
По всей длине тяговых цепей 4 через каждые Z звеньев установлены валики 19 с дисками 20 на концах, причем валики 19 с дисками 20 на концах расположены относительно пальцев 9 таким образом, что число звеньев тяговой цепи 4 между любым пальцем 9 и любым валиком 19 кратно числу
зубьев z звездочки.
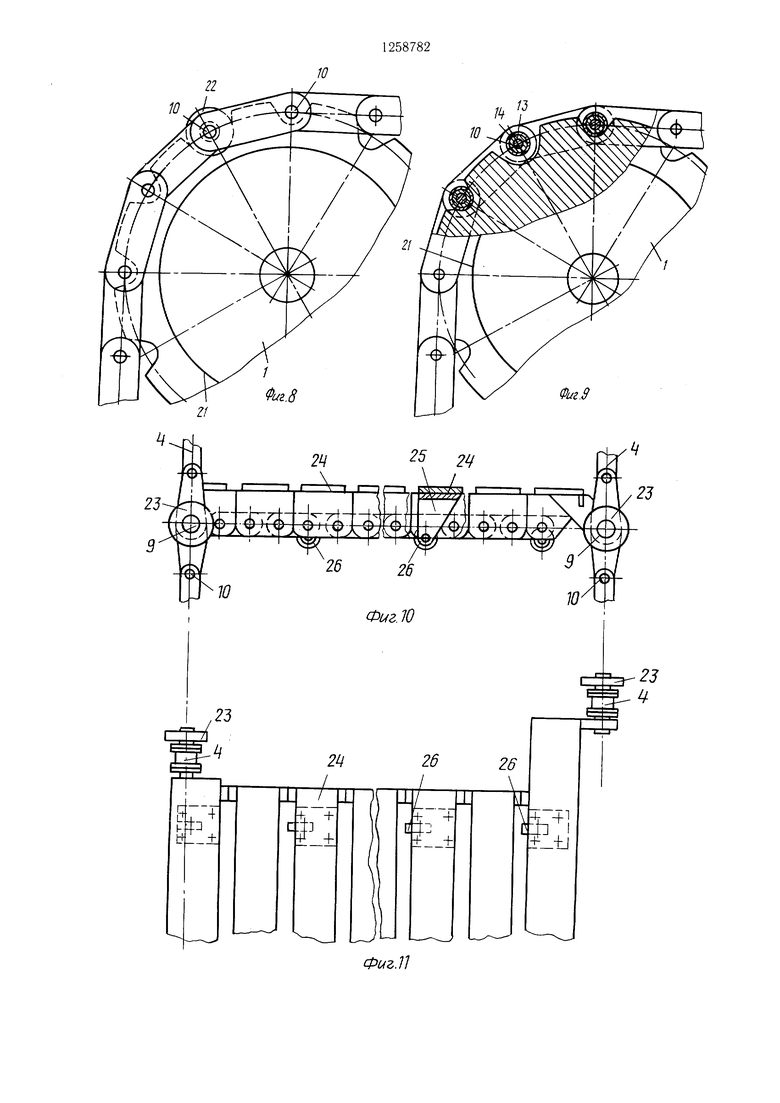
На боковых сторонах каждой звездочки 1-3 выполнены ободы 21, причем сумма радиусов обода 21 и диска 20 равна радиусу делительной окружности звездочки 1-3. Тяговые цепи 4 могут быть снабжены роликами 22, установленными на втулках 13. Наружный диаметр ролика 22 соответствует размерам большой впадины 18 звездочек 1-3 и равен наружному диаметру ролика 12.
При невысоких скоростях движения и небольшой разнице в диаметрах пальца 9 и валика 10 тяговые цепл могут надежно работать и без установки на них валиков 19 с дисками 20 или роликов 22.
Звездочки 1-3 установлены относительно тяговых цепей 4 таким образом, что в большие впадины 18 попадают только пальцы 9 и валики 19 или ролики 22, что становится возможным за счет кратности числа всех звеньев тяговой цепи 4 и числа звеньев тяговой цепи 4 между двумя ближайшими пальцами 9 числу зубьев z звездочек 1-3 и за счет расстановки валиков 19 или роликов 22 по всей длине тяговой цепи 4 через каждые z звеньев.
Грузонесущие платформы 5 снабжены
опорными катками 23, взаимодействующими с горизонтальными направляющими 6 и вертикальными направляющими 7. К перекладинам 24 грузонесущих платформ 5 снизу на кронштейнах 25 прикреплены дополнительные опорные катки 26 с возможностью из взаимодействия с дополнительными горизонтальными направляющими 27, установленными в нижней части конвейера.
Конвейер работает следующим образом.
Приводные звездочки 1 передают движение тяговым цепям 4, которые в свою очередь приводят в движение соединенные с ними Грузонесущие платформы 5.
При обходе какой-либо звездочки 1-3 палец 9 попадает в больщую впадину 18
этой звездочки, при этом ролик 12. в случае использования роликовых тяговых цепей, или втулка 11, в случае использования втулочных тяговых цепей, взаимодействует с поверхностью больщой впадины 18 и поверхностью прилегающих к ней зубьев. При обходе пальцем 9 приводной звездочки 1 ролик 12 или втулка 11 передают движение от зуба, прилегающего к большой впадине
18, к тяговой цепи 4 также, как и ролики 14 или втулки 13.
Так как число звеньев тяговой цепи 4 между двумя ближайшими пальцами 9 в несколько раз больше, чем число зубьев z звездочек 1-3, то после прохождения через звездочку 1-3 пальца 9 в большую впадину 18, совершившую оборот, попадают либо валик 19 с дисками 20, если цепи 4 снабжены валиками 19, либо ролик 22, если цепи 4 снабжены роликами 22.
Если тяговая цепь 4 снабжена валиками 19 с дисками 20, то при обходе звездочек 1-3 диски 20 взаимодействуют с обо- дами 21 звездочки, а так как сумма радиусов диска 20 и обода 21 равна радиусу дели- тельной окружности звездочек 1-3, то центр валика 19 находится на делительной окружности звездочки 1, 2, 3 и поэтому последующий по ходу движения ролик 14 или втулка 13 входит в зацепление с последующим зубом звездочек 1-3, также, как если бы вместо предыдущей большой впадины 18 была обычная впадина.
Если тяговая цепь 4 снабжена роликами 22, то центр ролика 22 при попадении ролика 22 в большую впадину 18 также на- ходится на делительной окружности звездочек 1-3 и последующий ролик 14 так же входит в зацепление с зубом звездочек 1-3, как и в случае установки на цепи 4 валиков 19 с дисками 20.
5
Если тяговая цепь 4 снабжена только пальцами 9, то в больщие впадины 18 кроме роликов 12 будут попадать и ролики 14, наружный диаметр которых не соответствует геометрическим размерам больших впадин 18. В этом случае в начале обхода звездочек 1-3 ролик 14 взаимодействует с поверхностью большой впадины 18,-причем его центр лежит ниже делительной окружности звездочек 1-3, вследствие чего последующий ролик 14 входит в зацепление с зубом в точке ближе к вершине зуба, чем обычно и по мере поворота звездочек 1-3 перемещается по- поверхности зуба внутрь впадины, занимая нормальное положение, а ролик 14, находящийся в большой впадине 18 с поворотом звездочек 1-3, постепенно приподнимается над поверхностью большой впадины 18 до тех пор, пока его центр не займет место на делительной окружности звездочек 1-3.
Во время движения грузонесущей платформы 5 с грузом по нижнему горизонтальному участку трассы, на котором производится загрузка конвейера, дополнительные опорные катки 26 взаимодействуют с дополнительными горизонтальными направляющими 27, поддерживая перекладины 24 гру- зонесущих платформ 5 и снижая колебания отдельных перекладин 24 и всего полотна в целом, возникающие в момент загрузки.
10
(fiuz 2
21
Фиг.З
7/ 12
17
1k
фиг. 7
10
Фиг.11
Фиг. 1Z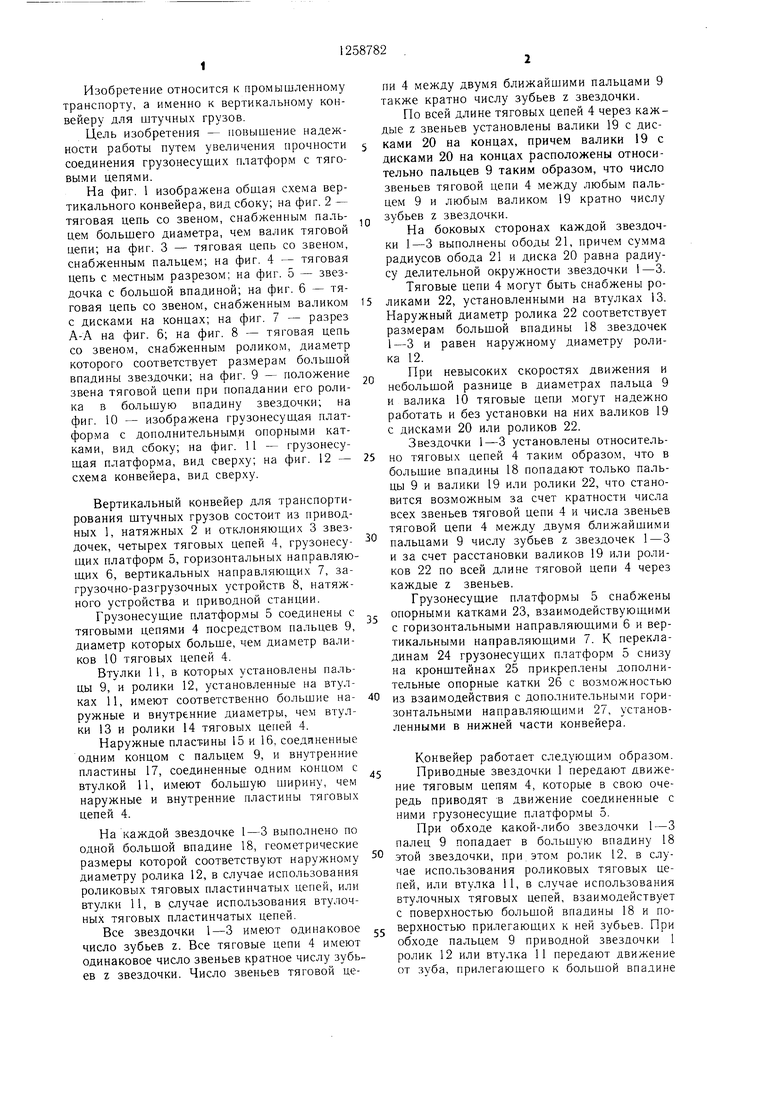
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный конвейер для штучных грузов | 1988 |
|
SU1549863A1 |
| СКРЕБКОВЫЙ КОНВЕЙЕР ПИТАТЕЛЯ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 2000 |
|
RU2188788C2 |
| ПЕРЕДАЧА ВТУЛОЧНОЙ ЦЕПЬЮ | 2013 |
|
RU2520186C1 |
| ГОРИЗОНТАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1994 |
|
RU2090480C1 |
| МАШИНА СОРТИРОВКИ ЯИЦ | 1999 |
|
RU2158079C1 |
| Перегрузочное устройство | 1987 |
|
SU1463661A2 |
| ПРИВОДНОЙ И/ИЛИ ОГИБНОЙ ЭЛЕМЕНТ ДЛЯ ЦЕПИ ТРАНСПОРТЕРА ДЛЯ ПЕРЕВОЗКИ ЛЮДЕЙ И ЦЕПНАЯ СИСТЕМА | 2007 |
|
RU2437824C2 |
| Устройство для восстановления шага втулочных и роликовых цепей | 1980 |
|
SU912396A2 |
| Цепная передача | 1990 |
|
SU1776901A1 |
| Рабочий орган вертикального цепного конвейера | 1987 |
|
SU1606396A1 |

| СПОСОБ ВАСКУЛЯРИЗИРОВАННОЙ АУТОНЕРВНОЙ ПЛАСТИКИ ДЕФЕКТА ЛУЧЕВОГО НЕРВА | 2001 |
|
RU2212850C2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1972 |
|
SU466157A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
