Изобретение относится к станкостроению и может быть использовано в предазионных станках, имеющих в приводах подач гидравлический цилиндр с поршнем, шариковые винтовые пары качения или винтовые пары скольжения j в которых непрямолинейность и непараллельность ведущего звена, например ходового винта, может отразиться на иепрямолинейности траекто- 10 ру которых имеются зазоры, обесперии движения ведомого звена, мер гайки, и в конечном счете на прямолинейности перемещения .поДвиж- ного органа станка, например сТола, с которым связано ведомое звено.
Целью изобретения является повышение точности перемещения подвижного органа путем устранения влияния непараЛлельности винта направлению перемещения подвижного органа.
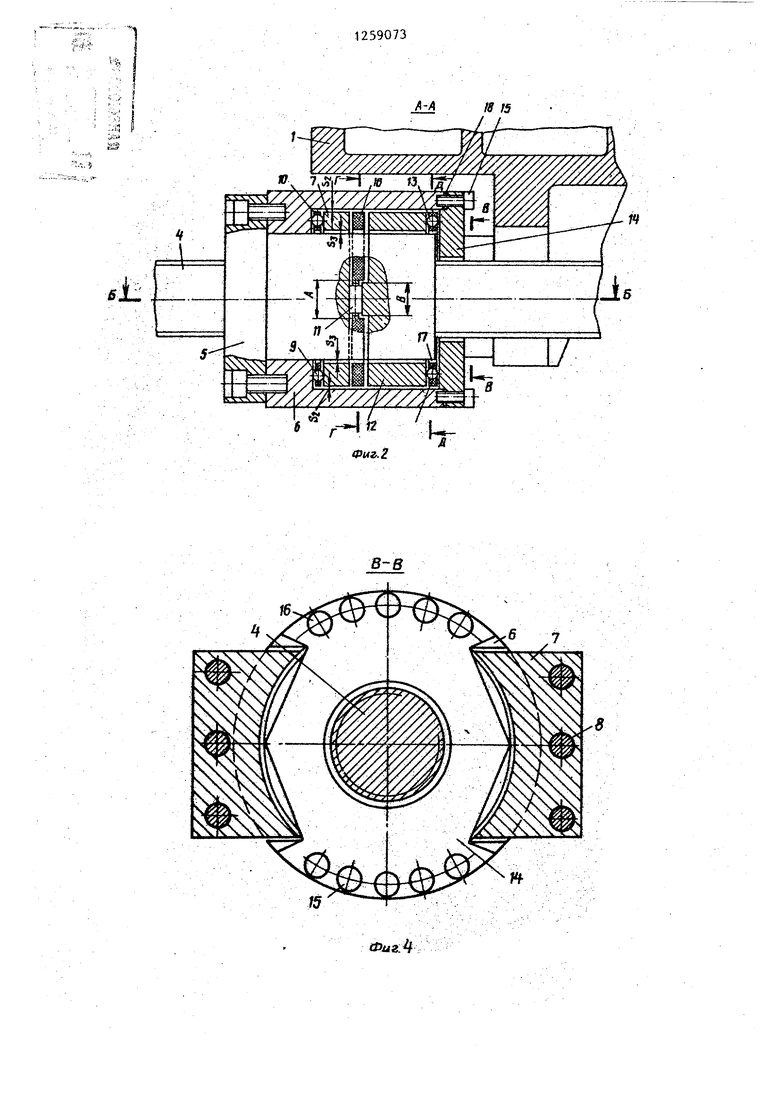
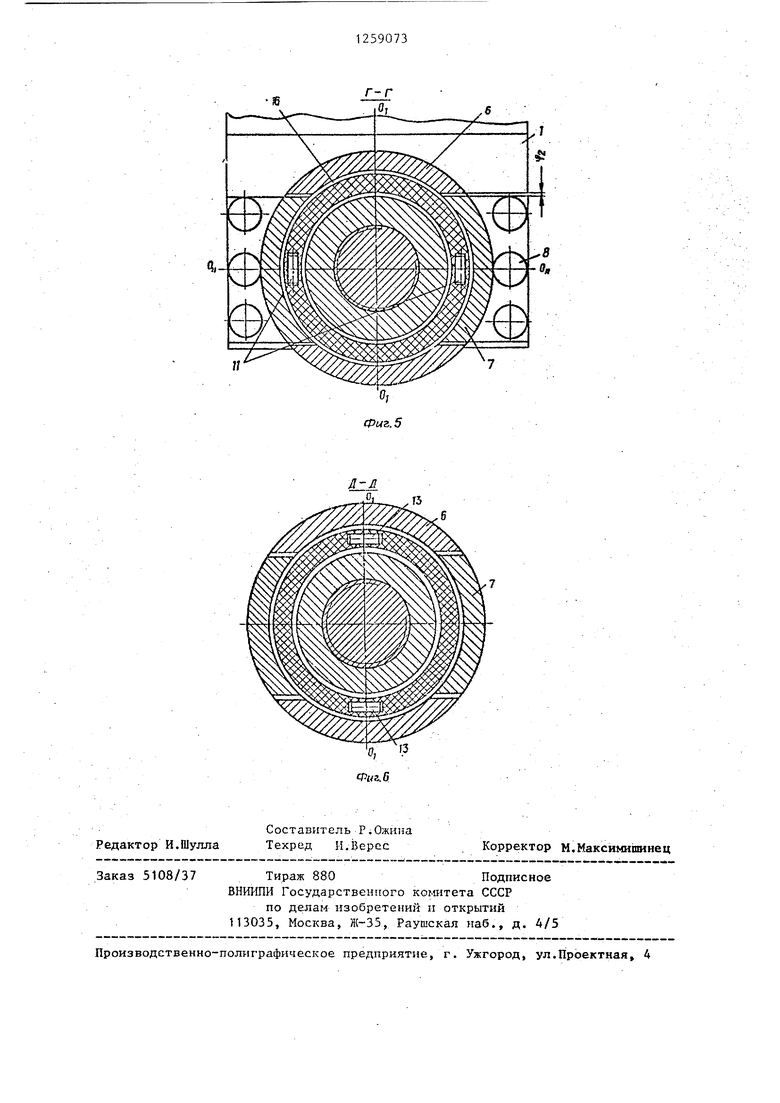
Р1а фиг. 1 изображе11ы станина, подвижный орган и пара винт-гайка, . поперечный разрезу на фиг, 2 - разрез Л-А на фиг. 1 (устройство в вертикальной плоскости, параллельной оси ходового винта); на фиг. 3 - разрез Б-Б на фиг. 2 (устройство в горизонтальной плоскости, параллельной оси ходового винта)j на фиг, 4- разрез В-В на фиг. 2j на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - раз рез Д-Д на фиг. 2.
Устройство для передачи движения содержит подвижньй орган 1 (напри- мер, стол), который опирается на станину 2 в направляющих 3. Ходовой винт 4 расположен на станине 2 и находится в зацеплении с гайкой 5, которая крепится к подвижному органу 1 (столу) через промежуточное звено. Промежуточное звено состоит из корпуса б и кронштейна 7, жестко закрепленного на подвижном органе 1 посредством винтов 8. Между корпусом 6 и кронштейном 7 для их взаимодействия расположены шарики 9, заключенные в сепаратор 10. Для обеспечения возможности перемещения корпуса 6 относительно кронштейна 7 и вертикальной и горизонтальной плоскостях предусмотрены осевой S (фиг. 3) и радиальный Sj (фиг. 2) зазоры. Меладу кронштейном 7 и гайкой 5 имеется зазор 5$ (фиг. 2).
Кронштейн 7 своим внутренним торцом взаимодействует через два ролика П с промежуточной втулкой 12, которая через два ролика 13 в на12590732
правлении, параллельном оси ходового винта 4, фиксируется фланцем 14. Фланец 14 винтами 15 жестко- соединен с корпусом 6. РОЛИКИ 11 и 13 расположены во взаимно перпендикулярных плоскостях, а для строгой; ориентации между собой заключены соответственно в сепараторы 16 и 17, по внутреннему и наружному диаметчиваюпще возможность их перемеще- ния в радиальном направлении. В сепараторах 16 и 17 выполнены пазы А , взаимодейстйующие с выступами Б ,
выполненными на торцовых поверхностях втулки 12. Для обеспечения требуемой осевой жесткости и исключения проскальзывания роликов 11 и 13 относительно промежуточной втулке
12 под действием крутящего момента, . передаваемого резьбой ходового винта 4 гайке 5, закрепленной на корпусе 6 промежуточного звена, служат винты 15, которые посредством фланца 14 создают необходиьай предварительный натяг, велтшна которого ограничивается компенсационным кольцом 18.
Устройство для передачи движения
работает следующим образом.
При вращении ходового винта 4 гайке 5 передается поступательное движение вдоль оси ходового винта 4 (например слева направо). От гайки 5 поступательное движе1ше через корпус 6, шарики 9, кронштейны 7 передается подвижному органу 1 (столу) ,
При этом, если ось виНта 4 не
параллельна траектории перемещения подвижного органа 1 или резьбовая поверхность винта 4 имеет радиальное биение относительно продольной оси, происходит смещение кронштейна 7 относительно корпуса 6 в плоскости.
пе| пёндикулярной оси ходового виИ- та 4.
Смещение кронштейна 7 относительно корпуса 6 вдоль оси (фиг. 5 и .6) происходит за счет перекатывания Кронштейна 7 по шарикам 9 и роликам t3 торцовой поверхности промежуточной втулки 12, так как оси роликов 13 ориентированы сепараторами 17 перпендикулярно оси ,..
Промежуточная втулка 12, связанная через ролики 11 силой предварительного натяга с кронштейном 7,
перемещения вдоль оси 0( О, относительно кронштейна 7 не имеет, так как оси роликов 11 ориентированы параллельно оси 0|0i (фиг. 5).
Смещение кронштейна 7 относительно корпуса 6 вдоль оси 0),0,| (фиг. 5) происходит за счет перекатывания кронштейна 7 по шарикам 9, а также за счет перекатывания по роликам 11, относительно связанной с ним силой предварительного натяга через ролики 11 промежуточной втулки 12, которая вдоль оси ОцOnперемещения относительно корпуса 6 не имеет, так как оси роликов 13, контактирующие с ее торцовой поверхностью, ориентированы параллельно оси О, Он.
Таким образом,- смещение кронштейна 7 относительно корпуса 6 может происходить одновременно вдоль обеих осей OiO и 0„ 0„ и, следовательно, во всех радиальных направлениях. Причем величина смещения не вызывает изменения сдвигающей силы, так как силовое замыкание перемещаемых поверхностей осуществляется силой предварительного натяга, которая является постоянной.
Величина радиального смещения кронштейна ограни,чивается величиной радиальных зазоров Sj и Sj , которые определяются исходя из величины .радиального биения резьбы ходового винта и допуска на точность расположения оси ходового винта относительно направляющих.
2590734
Устройство для передачи движения подвижному органу полностью устраняет влияние непараллельности оси ходового винта направлению переме- щения подвижного органа, исключает радиальное биение резьбы ходового винта относительно опорных шеек, улучшается работа промежуточного звена.
10
Формула изобретения
0
5
Устройство для передачи движения, содержащее подвижный орган и пару , винт-гайка, гайка которой соединена с подвижным органом через промежуточное звено, отличающееся тем, что, с целью повьшения точности перемещения подвижного органа путем устранения влияния непарал-- лельности винта направлению перемещения подв11жного органа, промежуточное звено вьшолнено в виде корпуса, имеющего фланец и закрепленного на торце гайки, обращенном к подвижному органу, кронштейна, закрепленного на последнем соосно корпусу, сепаратора с шариками, размещенного между обращенными друг к другу торцами кронштейна и корпуса, втулки, размещенной внутри кронштейна, и двух дополнительных сепараторов е расположе11ны ш в них во взаимно перпендикулярных плоскостях ролика- ми размещенных на торцах втулки и взаимодействующих с кронштейном, и с фланцем.
.5
0
tJS
:.-.. 5

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения рабочего органа (его варианты) | 1983 |
|
SU1209970A1 |
| Устройство линейного перемещения исполнительного органа | 1989 |
|
SU1719753A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНОГО НАТЯГА ПОДВИЖНОГО ОРГАНА | 1991 |
|
RU2021091C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПЕРЕДВИЖНОГО ЭЛЕМЕНТА | 2019 |
|
RU2728978C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ ПОДВИЖНОМУ ОРГАНУ | 1993 |
|
RU2093337C1 |
| Винтовая передача | 1985 |
|
SU1285235A1 |
| Винтовая передача | 2022 |
|
RU2779490C1 |
| Винтовая передача | 1985 |
|
SU1320572A1 |
| ЛИНЕЙНЫЙ АКТУАТОР И ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2700562C1 |
| Механизм перемещения суппорта токарного станка | 1978 |
|
SU740408A1 |
Изобретение относится к станкостроению и может быть использовано в прициэионных станках. Изобретение позволяет повысить точность перемещения подвижного органа путем устранения влияния непараллельности винта направлению перемещения подвижного органа. Для этого промежуточное звено выполнено в виде корпуса 6, закрепленного на гайке 5 и кронштейна 7, жестко закрепленного на подвижном органе 1. Между внутренней стенкой корпуса 6 и наружным торцом кронштейна для их взаимодействия расположены шарики 9, заключенные в сепаратор 10. Для обеспечения возможности перемещения корпуса 6 относительно кронштейна 7 в вертикальной и горизонтальной плоскостях предусмотрены осевой и радиальный зазоры. Между кронвггейном 7 и гайкой 5 также имеется зазор. Кронштейн 7 внутренним торцом взаимодействует через два ролика 11 с промежуточной втулкой 12, которая, в свою очередь, через два ролика 13 фиксируется фланцем 14. 6 ил. в ГО ел со О « ОО
16
п
йиг;4
xl
Г5
Редактор И.Шулла
Составитель Р.Ожина Техред И.Версс
Заказ 5108/37 Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Л(-35, Раушская иаб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.Проектная 4
Корректор М.Максимишинец
| 1972 |
|
SU419361A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Авторское свидетельство СССР 689813, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
