(54) КРУГОВОЙ ИНТЕРПОЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Цифровой интерполятор | 1983 |
|
SU1140098A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Линейный интерполятор | 1987 |
|
SU1439534A1 |
| Круговой интерполятор | 1989 |
|
SU1665343A1 |
1
Изобретение относится к автомати- ке и вычислительной технике и может найти применение в устройствах вывода графической информации, а также в системах числового программного управления оборудованием.
Известен круговой интерполятор,
.содержащий блок управления, соединенный со счетчиком аппроксимируемых отрезков и счетчиком прйращеиий, регистр и преобразователь двоичного в код приращений координат 11
Недостатком данного интерполятора является невысокие быстродействие и точность, обусловленные наличием в нем преобразователя двоичного кода в код приращений координат.
Наиболее близким по технической сущности к предлагаемому является круговой интерполятор, содержащий накаплива1лций сумматор, один вход и выход которого подключены соответственно к выходу коммутатора и входу блока управления, соединенного выходами с первым входом коммутатора, выходами устройства и одними входами счетчиков, другие входы которых подключены к первым входам устройства, а выходк - ко вторым входам коммутатора 21 ,
Однако известный интерполятор обладает низким быстродействием, так как в нем невозможен интерполяционный шаг по двум координатс1М. Точность такого интерполятора также недостаточна.
Цель изобретения - повышение быстродействия и точности.
Указанная цель достигается тем, что
to в круговой интерполятор, содержащий накапливакяций суквиатор, один вход и выход которого подключены соответственно к выходу коммутатора и входу блока управления, соединенного выходами с. первым входом коммутатора, выходами интерполятора и одними входами счетчиков, другие входы которых подк/ночены к первым входам интерполятора, а выходы - ко вторым входам ком20мутатора, введен блок вычисления разности, подключенный входами к выходам счетчиков, а выходом - к третьему входу колвлутатора, причем другой вход накапливакидего сумматора соеди25нен со вторым входом интерполятора.
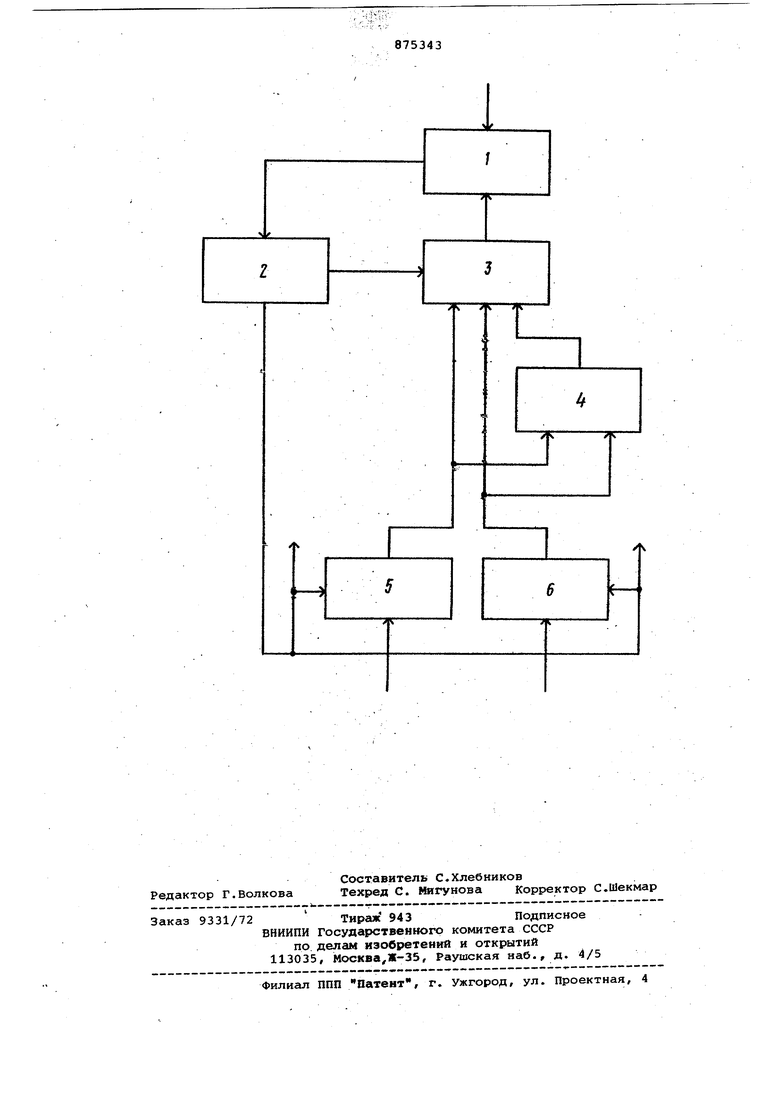
На чертеже представлена функциональная схема интерполятора.
Интерполятрр содержит, накапливающий сумматор 1, блок 2 управления, «комнататор 3, блок 4 вычислення
30
разности, счетчики (текущих значений координат) 5 и 6. Ко входам накапливающего сумматора 1 подключены выходы коммутатора 3, входы которого сйэединены с выходами с етчиков 5 и б текущих значений координат и выходами блока 4 вычисления разности, вход которого соединены с выходами счетчиков 5 и б текущих значений координат Вход блока 2 управления соединен с выходом- накапливающего сумматора 1, а выходы - с управляющими входами коммутатора 3 и счетчиков 5 и б текущих значений координат. Входами интерполятора являются входы занесения кода накапливакядего сумматора 1 и счетчиков 5 и б текущих значений координат. Выходами интерполятора являются выходы блока 2 управления , подключенные к управляющим входам счетчиков.5 и б текущих значений координат.
Интерполятор работает следующим образом.
В интерполяторе используется взаимосвязь между величиной отклонения точки от линии окружности о и величиной оценочной функции Р . Изменению 0 в пределах -1/2 «Л:1/2 соответствует изменение оценочной функции в пределах.
-9 + 1/4 iF iR + 1/4 Перед началом работы в счетчик 5 заносится йХо, а в счетчик б-ЛХо, где ЛХ(з, координаты начальной точки дуги окружности относительно центра. Сумматор 1 устанавливается в одно из состояний: или -R + 1/4.
Дальнейшая работа интерполятора осуществляется тактами. В каждом такте на сумматоре 1 вычисляется значение оценочной функции в .точках,сооветствующих такому направлению движения, которое способствует изменению знака оценочной функции. По полученному знаку оценочной функции, поступавшему из накапливакнцего сумматора 1 в блок 2 управления, в последнем формируются управляющие сигналы, поступакяцие на выходы интерполяторов и на входы счетчиков 5 и б.
Пусть требуется воспроизвести дугу окружности, расположенную в первом полуквадранте первого квадранта при движении против часовой стрелки. Модули йХо и ЙУо заносятся в счетчики 5 и 6, а в сумматор заносят R 1/4. В первом интерполяционно такте ко входам сул® атора 1 через коммутатор 3 подключают выходы блока 4 вычисления разности, на которо определена разность (2Ур+2)-2Х{,. В сумматоре 1 вычисляют значение оценочной, функции по формуле: F/, F(j + +(2Уо+ 2) -2Х(,. В блоке 2 управления анализируется знак полученного значения. Если 7/ О, то на выходах
блока 2 управления формируются управляющие сигналы, по которым из счетчика 5 вычитается единица, а к содержимому счетчика б прибавляется единица: X X(j- , У УО + 1. Если 10, то содержимое счетчика 5 не изменяется, а к содержимому сч.етчика б прибавляется единица: Х + При положительных значениях оценочной функции в дальнейшем интерполяционные шаги выполняют аналогично первому. При отрицательном значении оценочной функции в точке i ко входам сумматора 1 через коммута- . тор 3 подключают выходы счетчика б. На сумматоре 1 оценочная функция вычисляется по формуле + . Формирование управляющих сигналов на выходах блока 2 управления , поступающих на управляницие входы счетчиков 5 и б, аналогично первому интерполяционному шагу. Процесс интерполяции заканчивается при попадании в конечную точку.
Введение в интерполятор блока вычисления разности и дополнительных входов занесения кода в сумматор позволяет повысить быстродействие, так как выполняются совмещенные интерполяционные шаги по двум координатам. Также повышается точность, ибо в процессе интерполяции соблюдается условие: -1/2 1/2.
Повьшение быстродействия и точности кругового интерполятора позволяет повысить качество и скорость отработки окружностей в системах числового программного управления, а также в устройствах ввода-вывода информации ЦВМ.
,Формула изобретения
Круговой интерполятор, содержащий накапливающий сумматор, один вход и выход которого подключены соответственно к выходу коммутатора и входу блока управления, соединенного выходами с первым входом коммутатора, выходами интерполятора и одними входами счетчиков, другие вхо-, ды которых подключены к первым входам интерполятора, а выходы - ко вторым входам коммутатора, отличающийся тем, что, с целью повышения быстродействия и точности интерполятора, он содержит блок вычисления разности, подключенный входами к выходам счетчиков, а выходом к третьему входу коммутатора, причем другой вход накапливающего суьвиатора, соединен со вторымвходом интерполятора.
Источники информации, принятые во внимание при зкспертйзе
5 Машиностроение, 1966, с. 178-179.
