Изобретение относится к автоматике и может быть использовано в устройствах числового программного управления оборудования.
Цель изобретения - повышение на- дежности интерполятора.
На фиг. 1 представлена функциональная схема интерполятора; на фиг. 2 - схема коммутатора; на фиг. 3 - схема блока задания скорое- ти при реализации блока интерполяции по методу оценочной функции.
Интерполятор содержит (фиг. 1) блок 1 задания скорости, блок 2 интерполяции, первый счетчик 3 импуль- сов, элемент И 4, второй и третий счетчики 5,, 5 импульсов, первый и второй коммутаторы 6,, 6.
Первый и второй коммутаторы б, ,
6„ (фиг. 2) содержат элемент НЕ 7,
элементы И 8, 9.
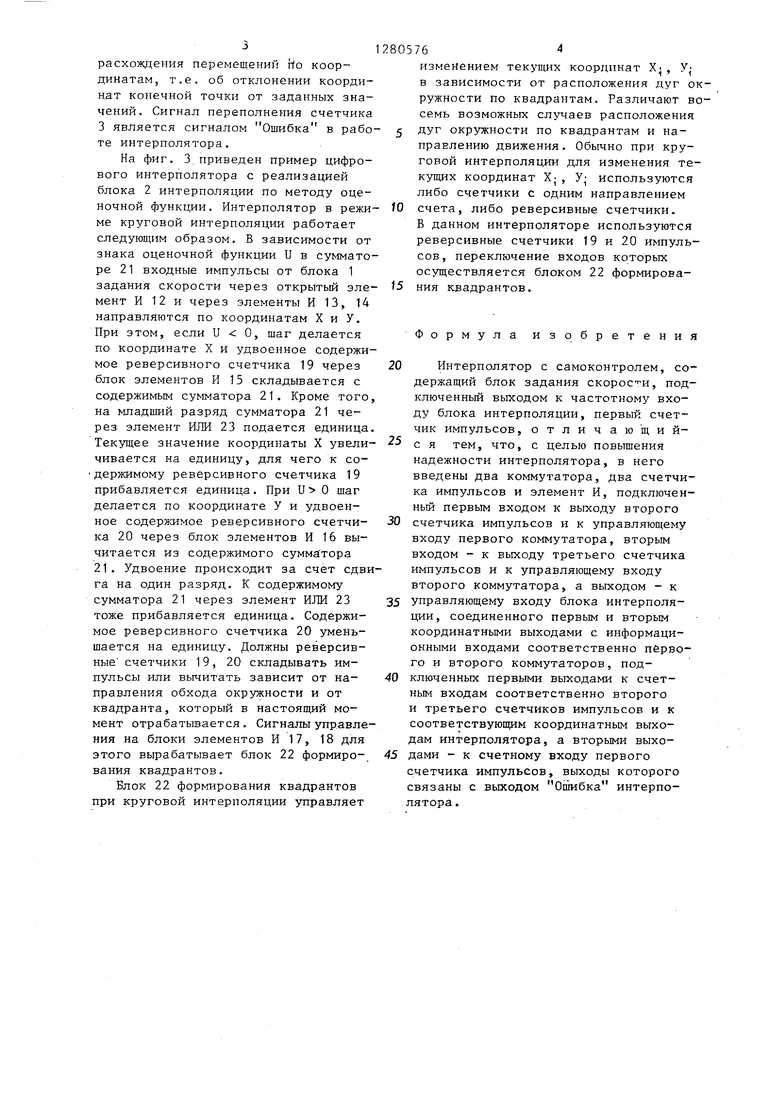
Блок 1 задания скорости (фиг.З) содержит генератор 10 импульсов и блок 11 скорости. БЛОК 2 интерполяци содержит (фиг. 3) элементы И 12, 13 и 14, блоки элементов И 15-18, реверсивные счетчики 19 и 20, сумматор 21, блок 22 формирования квадрантов, элемент ИЛИ 23.
Интерполятор работает следующим образом.
Исходными данными для работы интерполятора, а именно для блока 1 задания скорости, служит код скорости перемещения по контуру; для бло- ка 2 интерполяции - начальные координаты XQ, У0 дуги (при круговой интерполяции) или конечные координаты Х|, Yj. прямой (при линейной интерполяции) , для счетчиков 5 - перемеще- ния по координатам дх, йу, счетчик 3 обнулен.
Под действием импульсов блока 1 задания скорости блок 2 интерполяции вырабатывает импульсы, которые через коммутаторы 6, б проходят на выходы X и У интерполятора и на входы счетчиков 5, , 52 импульсов (пере- мещений), но не проходят на входы счетчика 3, что обеспечивается уровнем О с выхода счетчиков 5«, 5 (перемещений). Каждый импульс, поступивший на вход любого счетчика 5| или 5j, уменьшает его содержимое на единицу. Как только счетчики 5,, 5 обнулятся, на их выходах возникают уровни 1. В этом случае коммутаторы 6 (, 62, пропускают импульсы
;
0
5 0
Q
блока 2 интерполяции на входы счетчика 3 и не пропускают на выходы X и У. Работа коммутатора ) поясняется фиг. 2. При уровне О открыт элемент И 8 и закрыт элемент И 9. При уровне 1 - наоборот. Одновременно единичный уровень сигнала с выхода соответствующего счетчика 5( (5ji) через элемент И 4 вьфабаты- вает сигнал Конец обработки кадра, который прекращает работу блока 2 интерполяции.
При существующих методах интерполирования движение по траектории осуществляется ступенчато. При этом каждьй отрезок ступени (равный дискрете перемещения) есть движение по одной из координат. Приход в конечную точку по такой траектории движения, а следовательно, обнуление счетчиков не может происходить одновременно. Более того, на учас-тках дуги, прилежащих к координатным осям, разница в срабатывании счетчиков достигает большого количества импульсов. Все это приводит к необходимости искусственного окончания кадра. В интерполяторах с общим счетчиком перемещений это происходит автоматически, В интерполяторах с раздельными счетчиками по координатам это производится следующим образом. Как только один из счетчиков обнулится, он запрещает выдачу импульсов блоком интерполяции по соответствующему координатному выходу и ждет обнуления другого счетчика. Как только оба счетчика обнулятся, вьфабатывается сигнал Конец отработки кадра. При таком искусственном окончании опережение (отставание) одной из координат, приводящее к отклонению движения от заданной траектории, остается незамеченным. В данном интерполяторе о.бнуле- ние счетчика 5(, (52) не прекращает выдачу импульсов блоком 2 интерполяции по соответствующему его координатному выходу. С помощью соответствующего коммутатора 6, ( импульсы поступают на вход счетчика 3. В случае, если до обнуления второго счетчика 5, либо 5 на вход счетчика 3 не поступают импульсыj расхождения в перемещениях по координатам нет, если поступают, то расхождение есть. Выбирая объем счетчика 3, по его переполнению судят о величине
расхождения перемещений rto координатам, т.е. об отклонении координат конечной точки от заданных значений. Сигнал переполнения счетчика 3 является сигналом Ошибка в работе интерполятора.
На фиг. 3. приведен пример цифрового интерполятора с реализацией блока 2 интерполяции по методу оценочной функции. Интерполятор в режиме круговой интерполяции работает следующим образом. В зависимости от знака оценочной функции U в сумматоре 21 входные импульсы от блока 1 задания скорости через открытый элемент И 12 и через элементы И 13, 14 направляются по координатам X и У. При этом, если U О, шаг делается по координате X и удвоенное содержимое реверсивного счетчика 19 через блок элементов И 15 складывается с содержимым сумматора 21. Кроме того на младший разряд сумматора 21 через элемент ИЛИ 23 подается единица Текущее значение координаты X увеличивается на единицу, для чего к со- держимому реверсивного счетчика 19 прибавляется единица. При U О шаг делается по координате У и удвоенное содержимое реверсивного счетчика 20 через блок элементов И 16 вычитается из содержимого сумматора 21. Удвоение происходит за счет сдвига на,один разряд. К содержимому сумматора 21 через элемент ИЛИ 23 тоже прибавляется единица. Содержимое реверсивного счетчика 20 уменьшается на единицу. Должны реверсивные счетчики 19, 20 складывать импульсы или вычитать зависит от направления обхода окружности и от квадранта, который в настоящий момент отрабатывается. Сигналы управления на блоки элементов И 17, 18 для этого вырабатывает блок 22 формирования квадрантов.
Блок 22 формирования квадрантов при круговой интерполяции управляет
805764
изменением текущих координат Х , в зависимости от расположения дуг окружности по квадрантам. Различают восемь возможных случаев расположения
5 дуг окружности по квадрантам и направлению движения. Обычно при круговой интерполяции для изменения текущих координат Xj , используются либо счетчики с одним направлением
fO счета, либо реверсивные счетчики. В данном интерполяторе используются реверсивные счетчики 19 и 20 импульсов, переключение входов которьк осуществляется блоком 22 формирова15 ния квадрантов.
Формула изобретения
Интерполятор с самоконтролем, содержащий блок задания скорос т-и, подключенный выходом к частотному входу блока интерполяции, первый счетчик импульсов, отличаю щи йс я тем, что, с целью повышения надежности интерполятора, в него введены два коммутатора, два счетчика импульсов и элемент И, подключенный первым входом к выходу второго
счетчика импульсов и к управляюп1ему входу первого коммутатора, вторым входом - к выходу третьего счетчика импульсов и к управляющему входу второго коммутатора, а выходом - к
управляющему входу блока интерполяции, соединенного первым и вторым координатными выходами с информационными входами соответственно первого и второго коммутаторов, подключенных первыми выходами к счетным входам соответственно второго и третьего счетчиков импульсов и к соответствующим координатным выходам интерполятора, а вторыми выходами - к счетному входу первого счетчика импульсов, выходы которого связаны с выходом Ошибка интерполятора.
0ml
ю
С
/
/г Ч
О/П
Редактор И, Рыбченко
Составитель Н. Горбунова
Техред И.Попович Корректор СЛИекмар
Заказ 7065/52Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Физ.2
Фие.5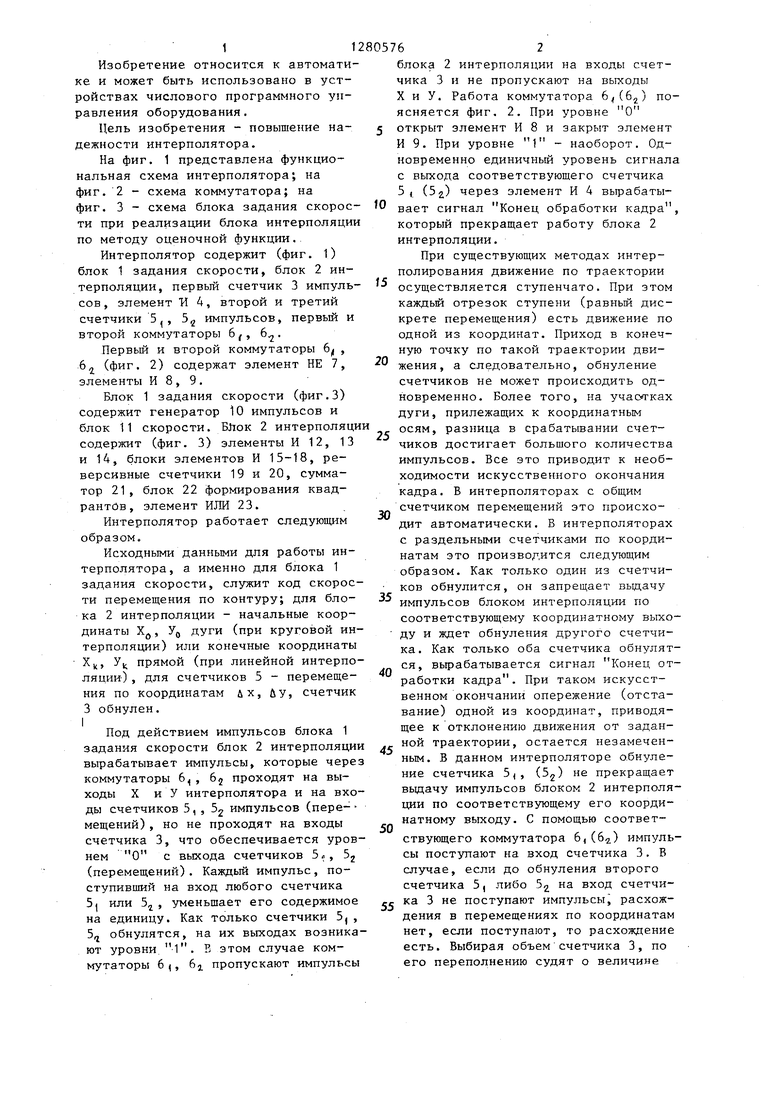
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1985 |
|
SU1290263A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Линейно-круговой интерполятор | 1986 |
|
SU1312530A1 |
| Линейный интерполятор | 1985 |
|
SU1298714A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Интерполятор с самоконтролем | 1990 |
|
SU1777122A1 |
| Линейно-круговой интерполятор | 1987 |
|
SU1462250A2 |
| Круговой интерполятор | 1980 |
|
SU875343A1 |
Изобретение относится к области автоматики и может быть использовано в устройствах числового программного управления оборудованием. Цель изобретения - повышение надежности интерполятора. Интерполятор содержит блок 1 задания скорости, блок 2 интерполяции, первый счетчик 3 импульсов , элемент И 4, второй и третий счетчики 5,, 52 импульсов, первый и второй коммутаторы 6,, Ь . Введение элемента И и по числу коор- динат счетчиков импульсов и коммутаторов позволяет обеспечить правильность отработки кадров за счет подсчета и регистрации отклонения прихода в конечную точку по координатам в конце отрабатываемого кадра. 3 ил. iD ГС 00 ел cpi/8.f
| 3877604/24-24 08.04.85 30.12.86 | |||
| Бюл | |||
| В.И | |||
| Григорьев, Ларионов и Л.В, I 48 B.C | |||
| Шатунов, Салимуллина 621.503.55(088.8) Программное управление станками | |||
| Сборник/Под ред | |||
| В.Л | |||
| Сосонкина | |||
| ,М.: Машиностроение, 1981, с | |||
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Цифровой интерполятор | 1977 |
|
SU665286A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство автоматики станков с программным управлением | |||
| Сборник | |||
| М.: Высшая школа, 1979, с, 130-131, рис. | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
