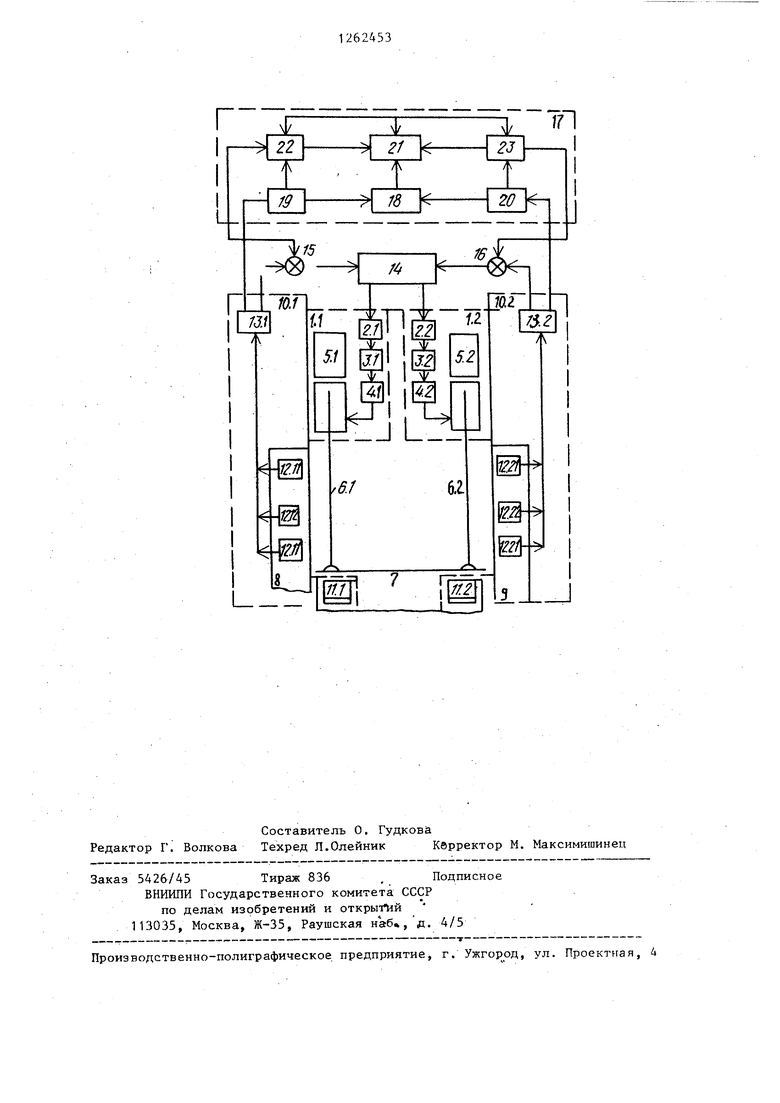
ю Изобретение относится к оборудованию судоходных шлюзов, а именно (к подъемным механизмам подъемноопускных гидротехнических затворов, и является усовершенствованием известного устройства, описанного в авт.св. № 947831. Целью изобретения является стабилизация скорости движения и повышение точности устройства. На чертеже приведена схема устройства с блоком стабилизации движения . Устройство содержит две автономны силовые установки 1.1 и 1.2, каждая из которых состоитиз последовательно соединенных электродвигателя 2.1 (2.2), насоса 3.1 (3.2), программного гидравлического узла 4.1 (4.2) управления поршневым исполнительным механизмом 5.1 (5.2), к штоку 6.1 (6.2) которого подвешена одна из боковых кромок затвора 7 с направляющими 8 и 9. Блоки 10.1 (10.2) контро ля перемещения затвора включают датчики 11.1 (11,2), расположенные на боковых кромках затвора 7, приемники 12.1 (12.2) положения кромок зат вора, жестко связанные с направляющими 8 и 9 затвора.7, интеграторы 13.1(13.2), входы которых соединены с выходами приемников 12.11, ... 12.12, .., 12.1 h (12.2 1, 12.2 2,.. 12.2h). Первые выходы интеграторов через сумматоры 14 и 15 подключены к блоку 6 синхронизации, соединенно му своими выходами с электродвигате лями 2.1 и 2.2, а вторые выходы интеграторов подключены к блоку 17 ст стабилизации движения, который вклю чает узел 18 измерения скорости, соединенный с вторыми выходами интеграторов 13.1 и 13.2 через преобразователи 19 и 20 скорости, узел 21 контроля скорости, на один из входов которого подается сигнал с канала пап , пропорциональный задаваемой скорости, а второй,вход связан с выходом узла 18 измерения ско рости, узлы 22 и 23 коррекции, у которых выходы соединены с сумматорами 14 и 15, на первые входы подаются сигналы с канала пропорциональные задаваемой скорости, вторые входы соединены с первыми выходами преобразователей 19 и 20 скорости, а третьи входы соединены 3 с выходами узла 21 контроля скорости .. . Устройство работает следующим образом. При движении затвора вверх датчики 11.1 (11,2), расположенные на затворе 7, встречают последовательно один за другим приемники 12.1 1, , . ,, 12.1 h(12.2 t,...12.2 h.), установленные на одинаковом расстоянии один от другого. В момент попадания светового луча светодиода датчика на управляющий электрод оптронного тиристора i-ro приемника, последний открывается, что приводит к сбросу выходных сигналов интеграторов 13.1 и 13.2, После прохождения датчиком очередного приемника на входы интеграторов подаются постоянные по величине сигналы и на выходах интеграторов появляются линейно возрастающие сигналы. В момент сброса выходных сигналов интеграторов в преобразователях 19 и 20 скорости фиксируются максимальные величины этих сигналов и производится деление постоянной величины, пропорциональной расстоянию между приемниками на максимальное значение поступившего сигнала, величина которого пропорциональна времени прохождения кромками затвора 7 расстояний между приемниками 12.1 1,...(12.2 1...), В результате на выходах преобразователей 19 и 20 скорости вьфабатываются сигналы, пропорциональные линейным скоростям перемещения кромок затвора 7. Выходные сигналы преобразователей 19 и 20 поступают на соответствующие, входы узла 18 измерения скорости и узлов 22 и 23 коррекции. В узле 18 измерения скорости в результате суммирования входных сигналов вырабатывается сигнал на выходе, пропорциональный фактической скороети средней точки затвора 7, относительно которой при выравнивании перекоса перемещаются в противоположных направлениях кромки затвора. Этот сигнал поступает в узел контроля скорости, где сравнивается с сигналом, пропорциональным заданной скорости, поступающим с устройства задания скорости системы управления приводом затвора (не показано). При равенстве сигналов, пропорциональных фактической и заданной скоростям, на выходах узла 21 контроля скорости выходные сигналы отсутству ют и на входы блока 16 синх.ропизации поступают сигналы с первых выхо дов интеграторов 13.1 и 13.2. Это соответствует движению средней точки затвора 7 с заданной скоростью и программное устройство осуществля ет поддержание бесперекосного движе ния. При этом, если сброс сигналов на выходах обоих интеграторов 13.1 и 13.2 происходит одновременно, т.е затвор движется без перекоса, сигнал рассогласования, получаемый в блоке 16 синхронизации, равен нулю. При возникновении перекоса затвора сброс электрического сигнала с выхода одного из интеграторов 13.1 или 13.2 происходит с задержкой по времени относительно момента сбр са сигнала на выходе другого интегратора, относящегося к кромке затвора, расположенного выше. В течени промежутка времени между сбросами сигналов на выходах интеграторов 13,1 и 13.2 в блоке 16 синхронизации вырабатывается сигнал рассогласования, с помощью которого соответ ственно изменяется скорость электро двигателей 2.1 и 2.2, благодаря чему устраняется перекос затвора, В случае отклонения действительной скорости перемещения средней точки .затвора 7 от заданной величины узел 21 контроля скорости подает командные сигналы на соответствующие входы узлов 22 и 23 коррекции скорости, сравнивающих сигналы, один из которых пропорционален заданной, а другой, поступающий с преобразова134 телей 19 и 20 скорости, пропорционален действительной скорости кромки, определяющих величину и знак отклонения и вырабатывающих сигналы коррекции, подаваемых через соответствующие суммирующие устройства 14 и 15 на входы блока 15 синхронизации, который одновременно с устранением перекоса производит корректировку линейной скорости перемещения кромок затвора 7. Формула изобретения Программное устройство управления гидротехническим затвором по авт.св. № 947831, отличающееся тем, что, с целью стабилизации скорости и повьшения точности устройства, оно содержит блок стабилизации движения, состоящийиз двух преобразователей скорости, узла измерения скорости, узла контроля скорости и двух узлов коррекции, у которых выходы соединены с сумматорами, включенными между первыми выходами интеграторов и соответствующими входами блока синхронизации, первые входы узлов коррекции подключены к каналу задания скорости, вторые входы соединены с первыми выходами преобразователей скорости, а третьи входы соединены с выходами узла контроля скорости, один из входов которого подключен к каналу задания скорости, а другой вход связан с выходом узла измерения скорости, при этом входа последнего через преобразователи скорости соединены с вторыми выходами интеграторов.
zTLJLZ
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство управления гидротехническим затвором | 1980 |
|
SU947831A1 |
| Устройство для управления бесперекосным движением гидротехнического затвора | 1980 |
|
SU885977A1 |
| Способ определения сдвига фаз между двумя гармоническими колебаниями одинаковой частоты | 1986 |
|
SU1401398A1 |
| МНОГОКАНАЛЬНОЕ ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ ЦИФРОВЫХ АСИНХРОННЫХ КАНАЛОВ | 1989 |
|
RU2033695C1 |
| Устройство для определения потери достоверности дискретной информации | 1986 |
|
SU1424127A1 |
| Система для определения скорости распространения и направления прихода ионосферного возмущения | 2016 |
|
RU2655164C2 |
| СПОСОБ ИНТЕГРАЦИИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И САМОИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2386108C1 |
| СИСТЕМА СВЯЗИ НАЗЕМНОГО ПУНКТА УПРАВЛЕНИЯ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2024 |
|
RU2825035C1 |
| Способ противодействия системам извлечения информации, осуществляющим распознавание индивидуальной структуры сигналов, путем искажения формы сигнала | 2021 |
|
RU2774743C1 |
| Преобразователь переменного напряжения в постоянное | 1986 |
|
SU1339516A1 |
Изобретение относится к оборудованию судоходных шлюзов, а именно к подъемным механизмам подъемноопускных гидротехнических затворов. Цель изобретения - стабилизация скорости движения и повышение точности бесперекосного перемещения гидротехнического затвора. Устройство является усовершенствованием изобретения по авт.св. № 947831. Усовершенствование заключается во введении в основное устройство блока стабилизации движения, сос:тоящего из двух преобразователей скорости, узла измерения скорости, узла контроля скорости и двух узлов коррекции, у которых выводы соединены с сумматорами, включенными между первыми выходами интеграторов и соответствующими вхрдами блока синхронизации. На первые входы узлов коррекций подаются сигналы, пропорциональные задаваемой скорости затвора, вторые входы соединены с первыми выходами преобразователей скорости, а третьи входы соеди§ нены с выходами узла контроля ско(/) рости (УКС). На один из входов УКС подается сигнал, пропорциональный С задаваемой скорости затвора, другой вход связан с выходом узла измерения скорости, а входа последнего через преобразователи скорости соединены с вторыми входами интеграторов . 1 ил.
rfTfl 7П7
щ
L
б.г
//f
| Программное устройство управления гидротехническим затвором | 1980 |
|
SU947831A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
