(54) УСТЮЙСТВО ДЛЯ УПРАВЛЕНИЯ БЕСПЕРЕКОСНЫМ ДВИЖЕНИЕМ ГИДЮТЕХНИЧЕСКОГО ЗАТВОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1236208A1 |
| Устройство для управления гидротехническим затвором шлюза | 1986 |
|
SU1436101A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Программное устройство управления гидротехническим затвором | 1985 |
|
SU1262453A2 |
| Программное устройство управления гидротехническим затвором | 1980 |
|
SU947831A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Устройство для синхронизации движения штоков силовых цилиндров | 1959 |
|
SU128369A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1234515A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
1
Изобретение относится к устройствам для синхронизации движения боковых кромок гидротехнических затворов, перемещаемых двумя автономными электрогидравлическими подъемниками, привод которых позволяет регулировать скорость подъема затвора.
Известно устройство для синхронизации боковых кромок гидротехнических затворов, в котором синхронное движение обеих кромок затвора обеспечивается частотным преобразователем 1.
Наиболее близким к предлагаемому является устройство, которое применяется с злектрогидравлическими подъемниками и осуществляет синхронизацию движения штоков силовых цилиндров за счет регулирования слива рабочей жидкости через синхронизирующие золотники, включенные в гидравлические системы подъемника. Это достигается путем изменения положения игл в синхронизирующих золотниках с помощью четырех силовых сельсинов, в качестве которых использованы трехфазные асинхронные двигатели с контактными кольцамк специального изготовления, включенные по дифференциальной схеме 2.
Использование известного устройства в регулируемом приводе подъемника приводит к сужению диапазона изменения и снижению стабильности скорости подъема затвора из-за наличия слива рабочей жидкости и1з гидросистем. По зтой же причине при работе в зоне малых скоростей имеет место остановка затвора. Применение в устройстве в качестве
10 силовых сельсинов, трехфазных асинхронных двигателей с фазным ротором сопровождается значительными потерями электрознергии, а длительное протекание по ним тока снижает их надежность из-за перегрева обмоток.
15
Цель изобретения - расашрение диапазона регулирования и стабилизация скоростей движения затвора.
Поставленная це}1ь достигается тем, что в устройство для управления бесперекосным
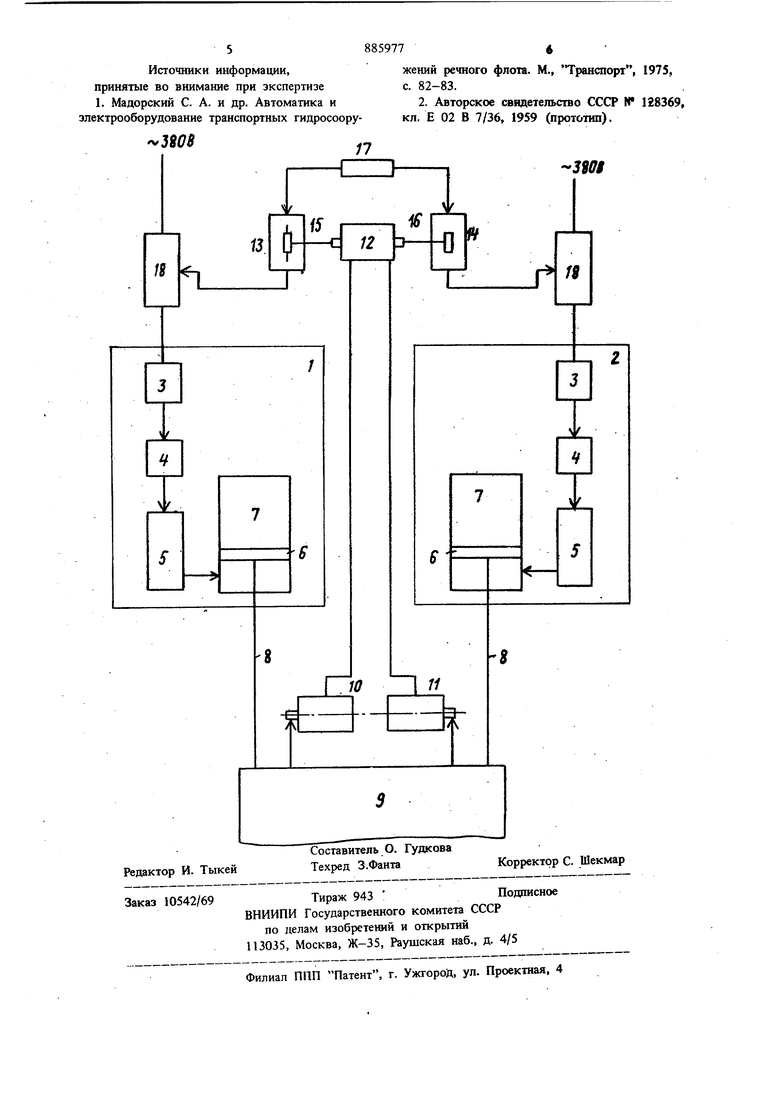
20 движением гидротехнического затвора, содержащее два электрогидравлических подъемника, электроприводы которых подключены через регулируемые преобразователи к блоку программного управления, и следящую систему выравнивания перекоса, следящая система Выравнивания перекоса состоит из сельсин-дат чиков скорости движения затвора, соединенного с ними сельсин-приемника и включенны между регулируемыми преобразователями и , блоком программного управления переменных резисторов, движки которь х жестко связаны с концами вала сельсин-приемника. На чертеже представлена схема предлагаемого устройства. Устройство содержит два автономных элек трогидравлических подъемника 1 и 2 с асин хронным короткозамкнутым электроприводом 3, с которым соединен насос 4, подающий рабочую жидкость через гидросистему 5 под поршень б гидроцилиндра 7, к штоку 8 которого подвешена одна из боковых кромок затвора 9. Следящая система включает в себя два сельсин-датчика 10 и 11 скоросга движения затвора, валы которых соединены с соответствующими боковыми кромками . затвора, один сельсин-приемник 12 и два пе ременных резистора 13 и 14, движки 15 и 16 которых жестко связаны с выходными концами сельсин-приемника 12, а регулируемые резисторы 13 и 14 введены в цепь задающего сигнала, пост)шающего с блока 17 программного управления в регулируемые преобразователи 18, Устройство работает следующим образом. Асинхронный короткозамкнутый электропри вод 3 подключен с помощью регулируемого Преобразователя 18 к трехфазной сети переменного тока с постоянными парг етрами и имеет (в отличии от известного) переменную частоту вращения в зависимости от величины сигнала, поступающего с блока 17 на вход преобразователя. Электропривод 3 вращает насос 4 постоянной подачи который через элементы гидросистемы 5 подает рабочую жидкость, в гидрощ1линдр 7 под поршен 6 и .перемещает его вместе со щтоком 8 и подвещенным к нему затвором 9. Контрол за перекосом осуществляют сельсин-датчики 10 и 11, валы которых связаны механической передачей с боковыми кромками затвора 9. Сигналы с датчиков поступают на сель син-приемник 12, где сравниваются. Сельсин датчики и сельсин-приемник соединены по известной дифференциальной схеме. При Движении штоков 8 с одинаковыми скоростями датчики повернутся на одинаковый угол и приемник останется неподвижным. При движении штоков с разными скоростями датчики 10 и. 11 повернутся на разные углы и в приемнике 12 появится синхронизир)тощий момент, который повернет ротор сельсин-при емника на угол, пропорциональный разности .4 I углов поворота сельсин-датчиков. При повороте ротора сельсин-приемника поворачиваются жестко связанные с выходными концами его вала движки 15 и 16 регулируемых резисторов, сопротивления 13 и 14 которых введены в цепи задающих сигналов, поступающих с выходов блока 17 на вход регулируемых преобразователей 18. Резисторы 13 и 14 включены таким образом в цепи задающих сигналов, что при их одновременном повороте величина сопротивления одного из них увеличивается, а другого соответственно уменьшается. При этом соответственно величина сигнала, поступающего на вход первого преобразователя уменьшается, а второго увеличивается. Соответственно увеличиваются или уменьшаются выходные параметры преобразователей 18, что изменяет частоту вращения электроприводов 3, подачу насосов 4 и количество рабочей жидкости, подаваемой в гидроцилиндры 7 под поршни 6, от чего скорости перемещения поршней б и штоков 8 также увеличиваются или уменьшаются и, таким образом, выравниваются. При исчезновении перекоса роторы сельсин-датчиков 10 и 11 начинают поворачиваться на одинаковый угол, синхронизирующий момент в сельсин-приемнике 12 исчезает и его ротор останавливается, фиксируя движки 15 и 16 резисторов в положении, соответствующем движению боковых кромок затвора 9 с одинаковь1ми скоростями. Предлагаемое устройство может быть использовано для бесперекосного движения гидротехнических затворов, перемещаемьгх двумя автономными подъемниками с регулируемыми электроприводами, имеющими механическую передачу. Формула изобретения Устройство для управления бесперекосным движением гидротехнического затвора, содержащее два электрогидравлических подъемника, электроприводы которых подключены через регулируемые преобразователи к блоку программного управления, и следящую систему ;выравниваш1я перекоса, о т л йч а ю. щ е е с я тем, что, с целью расширения диапазона и стабилизации скоростей движения затвора, следящая система выравнивания перекоса состоит из сельсин-датчиков скорости движения затвора, соединенного с ними сельсин приемника и включенных между регулируемыми преобразователями и блоком программного управления переменных резисторов. Движки которых жестко связаны с концами вала сельсин -приемника.
