Изобретение относится к обЬрудованию судоходных шлюзов, а именно к подъемным механизмам подъемно-опускных гидротехнических затворов.
Известно устрсКЯство управления электрогидравлическим приводом подъемно-опускного затвора, содержащее два поршневых исполнительных механизма, штоки которых соединены с затвором, силовые установки и блок синхронизации, в котором используются золотники, включенные в гидрав- лическую схему привода и управляемые следящей электрической системой. Золотники при возникновении перекоса затвора изменяют количество рабочей жидкости, поступающей под поршни силовых цилиндров путем регулирования ее слива из гидросистемы til
Известное устройство не обеспечивает возможности регулирования скорости Лодъема затвора.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее две автономные силовые установки, каждая из которых включает последовательно соединенные электродвигатель, насос, гидросистему, гидроцилиндр с. поршнем, соеди-. . ненным посредством штока с одной
из боковых кромок затвора, блок управления электродвигателями и схему синхронизации движения штоков гидроцилиндров 2.
Недостатком указанного устройства является нарушение стабилизации скоростей движения и остановки затвора в зоне малых скоростей в связи с наличием слива жидкости через синхро10низирующие золотники.
Цель изобретения - повышение точности перемещения гидротехнического затвора и исключение его перекоса.
Указанная цель достигается тем,
15 что в программном устройстве управления гидротехническим затвором, содержащем две силовые установки, каждая из которых выполнена в виде последовательно соединенных электродви20гателя, насоса и программного гидравлического узла управления поршневым исполнительным механизмом, шток которого соединен с одной из боковых кромок затвора, блок синхронизации,
25 выходы которого подключены к электродвигателям, и два блока контроля перемещения затвора, каждый блок контроля перемещения затвора снабжен двумя датчиками, установленными
30 на боковых кромках затвора, приемнинами, установленными на направляющих затворах, и двумя интеграторами, Ьходыкоторых соединены с выходами приемников, а выходы подключены к входам блока синзфонизации.
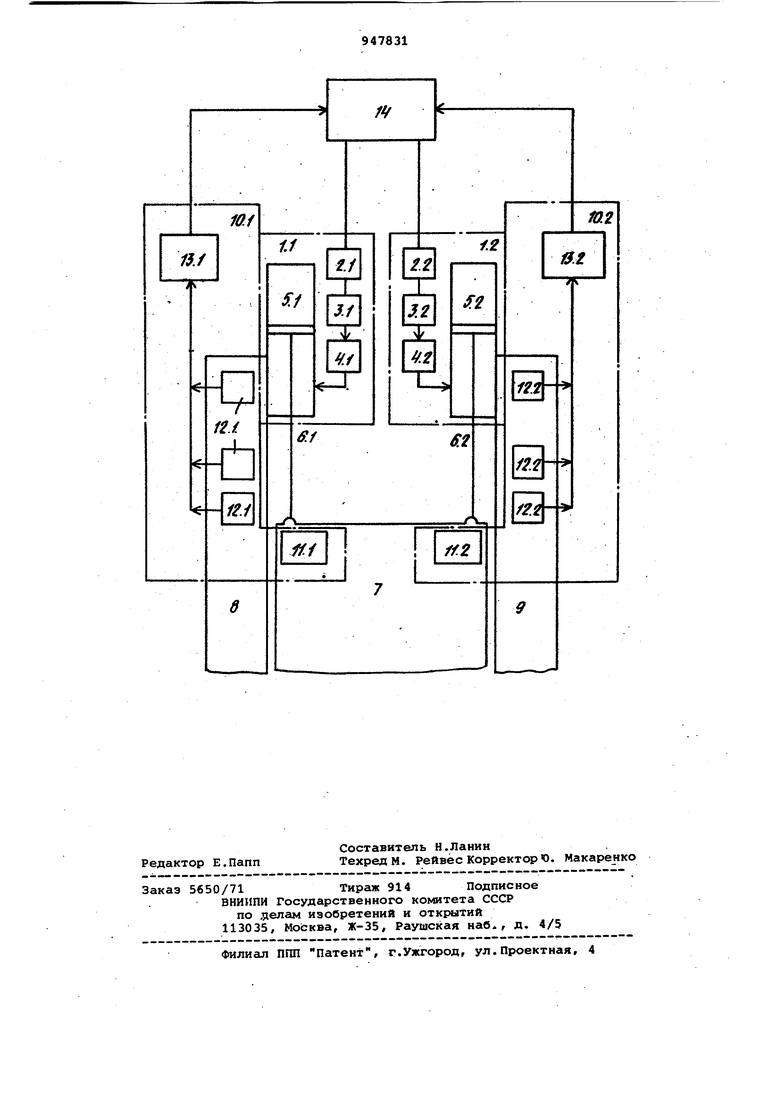
На чертеже приведена схема устройства.,
Устройство содержит две автономные силовые установки 1.1 и 1.2, каждая из КОТОЕ ЫХ состоит из электродвигателя 2.1 (2.2), насоса 3.1 (3.2), программного гидравлического узла 4.1 С.2) управления поршневого исполнительного механизма 5.1 (5.2), к штоку 6.1 (6.1) которого подвешена одна из боковых кромок затвора 7с направляющими 8 и 9.Блоки 10.1 (10.2). контроля перемещения затвора включают датчики 11.1 (11.2), расположенные на затворе 7, приемники 12.1 (12.2) :положения кромок затвора жестко связанные с направляющими 8 и 9 затвора 7, интеграторы 13.1 Ч 13.2), входы которых соединены с выходами 6.2.1, 6.2.2,...,б.2п (7.2.1, 7.2.2,..., 7,2;п)приемников, а выходщ подключенн к блоку 14 синхронизации, соединенного своими выходами с двигателями 2.1 и 2.2.
Устройство работает следующим образом.
При движении затвора вверх датчики 11.1 (11.2), расположенные на затворе 7, встречают последовательно один за другим приемники 12.1 и 12.2 В момент попадания светового луча светодиода датчика на управляющий электрод оптронного тиристора -го приемника, последний открывается, что приводит к сбросу выходного сигнала интегратора 13. После прохождения датчиком приемника на вход интегратора подается постоянный по величине сигнал и на выходе интегратора появляется линейно-возрастающий сигнал. Если сброс сигналов на выходах обоих интеграторов 13 происходит одиовременно, что соответствует бесперекос- ному движению затвора, то сигнал рассогласования, получаемый в блоке 14 синхронизации , равен нулю. При возникновении перекоса затвс а 7 сбросэлектрического сигнала с выхода юдного из интеграторов 13 происходит с задержкой по времени относительно момента сброса сигнала на выходе другого интегратора, относящегося к кромке затвора 7, расположенной выше. В течение промежутка времени между сбросами сигналов на выходах интеграторов 13 в блоке 14 синхронизации вырабатывается сигнал рассогласования, с помощью которого соответственно изменяется скорость электродвигателей 2.1 и 2.2, благодаря чему устраняется перекос затвора.
Предлагаемое выполнение устройства дает возможность получить синхронизацию движения штоков гидроцилиндров в широком диапазоне скоростей движения затвора. При этом повышается надёжность работы гидротехнического затвора, определяющая эффективность изобретения.
Формула изобретения
.
Программное устройство управления гидротехническим затвором, содержаще две силовые установки, каждая из которых выполнена в виде последовательно соединенных электродвигателя, насоса и программного гидравлического узла управления поршневым исполнительным механизмом, шток которого соединен с одной из боковых кромок затвора, блок синхронизации, выходы которого подключены к электродвигателям, и два блока контроля перемещения затвора, отличающеес я тем, что, с целью повышения точности устройства, каждый блок контроля перемещения затвора состоит из двух датчиков, установленных на боковых кромках затвора, прие 1никрв установленных на направляющих затвора и двух интегр.аторов,входы которых соединены с выходами приемников,а выходы подключены к входам блока синхронизации.
Источники информации, принятые во внимание при экспертизе
1.Мадорский С.А. и др. Автоматика и электрооборудование транспортных гидросооружений речного флота. М., Транспорт, 1975, с.106-113.
2.Муравьев В.Н. Повышение надежности привода ворот и затворов судоходных шлюзов для ускорения пропуска судов. ЦБНТИ Минречфлота, 1977, с.13-15 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство управления гидротехническим затвором | 1985 |
|
SU1262453A2 |
| Устройство для управления бесперекосным движением гидротехнического затвора | 1980 |
|
SU885977A1 |
| Устройство для управления двустворчатым затвором шлюза | 1984 |
|
SU1265706A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1236208A1 |
| Устройство для управления гидротехническим затвором шлюза | 1986 |
|
SU1436101A1 |
| Устройство для синхронизации движения штоков силовых цилиндров | 1959 |
|
SU128369A1 |
| Устройство для наполнения камеры шлюза | 1985 |
|
SU1291675A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |