Изобретение относится к машиностроению, в частности к устройствам управления с ручным приводом.
Целью изобретения является повышение точности устройства.
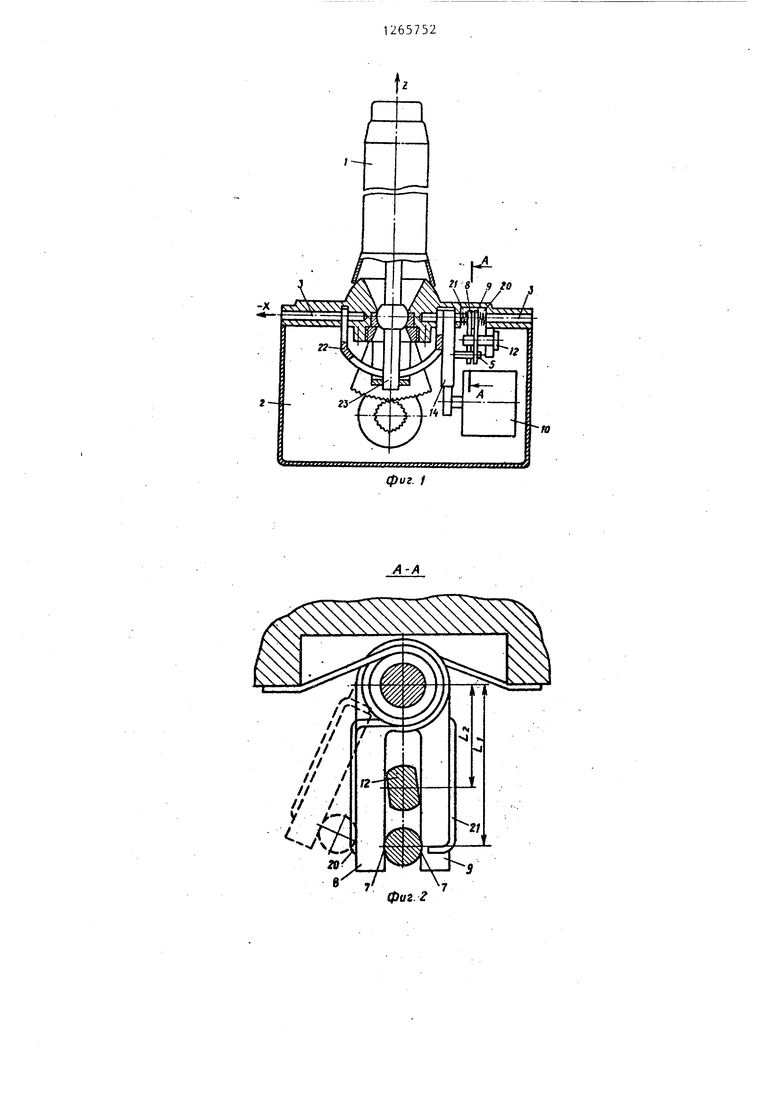
На фиг. 1 показано предлагаемое устройство, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - схема устройства.
Устройство управления содержит рукоятку 1 управления, установленную шарнирно в корпусе 2, и связанные с ней две взаимно перпендикулярные оси 3 и 4, кривошипы 5 и 6, установленные параллельно соответствующей оси 3 или 4, жестко связанные с ней и сопряженные своими диаметрально противоположными поверхностями 7 с рычагами 8 и 9, установленными шарнирно в корпусе 2 и подпружиненными к нему датчики 10 и 11 перемещения рукоятки 1. Устройство снабжено регулируемыми упорами 12 и 13, установленными в корпусе 2 и сопряженными с рычагами 8 и 9 для устранения зазора между рычагами.8 и 9 и кривошипами 5 и 6. Оси 3 и 4 связаны с датчиками 10 и 11 перемещения рукоятки 1 с помощь зубчатых секторов 14 и 15, жестко установленных на осях 3 и 4 и сопряженных с шестернями 16 и 17, установленными на подвижных контактах 18 и 19 датчиков 10 и 11 перемещения рукоятки 1.
Рычаги 8 и 9 подпружинены с помощ пружин 20 и 21.
Устройство содержит дугообразные вилки 22 и 23, в которые входит рукоятка 1. Вилки 22 и 23 жестко соединены с осями 3 и 4 с возможностью вращения совместно с ними и с кривошипами 5 и 6.
Устройство работает следующим образом.
При отклонении рукоятки 1 управле ния вращение передается одной из осей 3 или 4 через дугообразную вилку 22 или 23. Вместе с одной из осей
3 или 4 отклоняется от. центрального положения связанный с осью один из кривошипов 5 или 6. При этом один из сопряженных с отклоняемым кривошипом рычагов 8 или 9 также отклоняется, закручивая сопряженную с ним пружину 20 или 21, а другой рычаг остается на соответствующем упоре 12 или 13. Перемещение рукоятки 1 передается датчикам 10 и 11.
При снятии усилия с рукоятки 1 управления она возвращается в нейтральное положение под действием закрученной ранее пружины 20 или 21. Поворотом упоров 12 и 13 вокруг своей оси и фиксацией их в необходимом положении добиваются устранения зазора между рычагами 8 и 9 и кривошипами 5 и 6 при изменении характеристик пружин 20 и 21.
Формула изобретения
1.Устройство управления, содержащее рукоятку управления, установленную шарнирно в корпусе, и связанные
с ней две взаимно йерпендикулярные оси, кривошипы, установленные параллельно соответствующей оси, жестко связанные с ней и сопряженные своими диаметрально противоположными поверхностями с рычагами, установленными шарнирно в корпусе и подпружиненными к нему, датчики перемещения рукоятки отличающееся тем, что, с целью повьш1ения точности устройства оно снабжено регулируемыми упорами установленными в корпусе и сопряженными с рычагами для устранения зазора между рычагами и кривоши тани.
2.Устройство ПОП.1, отличающееся тем, что оси связаны с датчиками перемещения рукоятки с помощью зубчатых секторов, жестко установленных на о.сях и сопряженных
с шестернями, установленными на подвижных контактах датчиков перемещения рукоятки.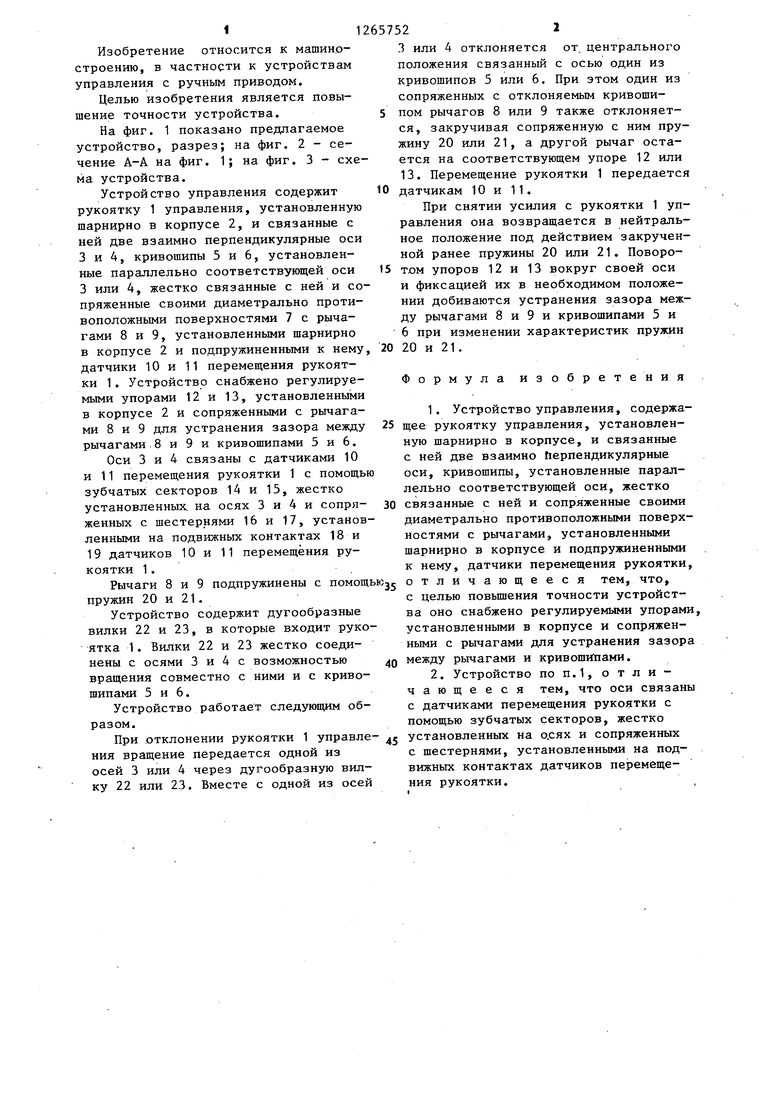
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАДАЮЩЕЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 2002 |
|
RU2226149C2 |
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| ОТСЕЧНОЙ КЛАПАН | 2005 |
|
RU2289748C1 |
| ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВАНИЯ БОЧЕК | 1999 |
|
RU2167076C2 |
| РЕГУЛЯТОР НАТЯЖЕНИЯ НИТКИ ИГЛЫ НА ШВЕЙНЫХ МАШИНАХ | 2002 |
|
RU2202017C1 |
| Рычаг переключения коробки передач | 1984 |
|
SU1229747A1 |
| Кромкоформирующий пресс для двусторонней упрочняющей обработки изделий по наклонным краям отверстий | 1981 |
|
SU1271613A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДЛИНЫ СТЕЖКА | 2009 |
|
RU2441949C2 |
| Сварочная головка для многопроходнойСВАРКи глубОКиХ РАздЕлОК | 1979 |
|
SU841838A1 |
| Устройство для двусторонней обработки изделий по наклонным краям отверстий | 1981 |
|
SU1034815A1 |
Изобретение относится к области машиностроения. Цель изобретения повышение точности устройства. Устройство управления содержит рукоятку управления (РУ), связанные с ней две оси, кривошипы, жестко связанные с осями, рычаги, шарнирно установленные в корпусе и подпружиненные к нему, датчики перемещения РУ. Повьш ение точности устройства обеспечивается путем установки в корпусе регулируемых упоров, сопряженных с рычагами для устранения зазора между рычагами и кривошипами, который возникает после длительной работы устройства и при изменении характеристик пружин. 1 з.п. ф-лы, 3 ил.
:
Ю
-vX4
23
фиг. j
| Патент США № 4350055, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
