мещения, причем рейка 4 подпружинена относительно конечного звена 5 привода 3 с помощью упругого элемента 6, первый датчик 7 положения, обмотка которого закреплена на рейке 4, а движок - на конечном звене 5 привода 3 линейного перемещения, пороговьй элемент 8, последовательно соединенные первый элемент сравнения 9 и усилитель 10, выход которого со-единен с входом привода 3, второй датчик I1 положения, тактильные датчики 12 и 13, установленные на рабочей поверхности захватных рычагов 2, первый 14 и второй 15 логические элементы ИЛИ, входы которых подключены к выходам тактильных датчиков левого и правого захватного рычага 2 соответственно, а выходы - к первому и второму входам логического элемента И 16. Кроме того, оно содержит последовательно соединенные первый ключ
66733
17, запоминающее устройство 18 и второй элемент сравнения 19, второй вход которого подключен к движку второго датчика 1I положения, обмотка которого закреплена на рейке 4, а движок - на корпусе 1, а его выход соединен с входом порогового элемента 8, программное устройство 20, выход которого подключен к первому входу первого элемента сравнения 9 и к первому сигнальному входу второго ключа 21, управляющий и второй сиг нальный входы которого подключены соответственно к выходу порогового элемента 8 и к движку первого датчика 7 положения, а его выход - к втодрму (отрицательному) входу первого элемента сравнения 9, индикаторное устг ройство 22, вход которого соединен с выходом порогового элемента 8, а вход программного устройства 20 - с движком первого датчика 7 положения. 1 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Автооператор для перемещений деталей | 1975 |
|
SU556848A2 |
| Устройство для синхронизации скорости вращения электродвигателя постоянного тока | 1978 |
|
SU748754A1 |
| Электропневматическая тормозная система транспортного средства | 1984 |
|
SU1197893A2 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| Сортирующее устройство | 1984 |
|
SU1245357A1 |
| НАКАПЛИВАЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВОГО ИЛИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ12 | 1973 |
|
SU392538A1 |
| Устройство для управления адаптивным роботом | 1982 |
|
SU1115015A1 |
Изобретение относится к области машиностроения и может быть использовано в манипуляторах различного назначения. Устройство позволяет обеспечить на схвате манипулятора заданное программное усилие и предотвращает разрушение объекта манипулирования. Устройство содержит корпус 1, в котором шарнирно установлены поворотные захватные рычаги 2, кинематически связанные с помощью зубчато-реечной передачи с приводом 3 линейного пере(Л N9 Од О со со 13 J3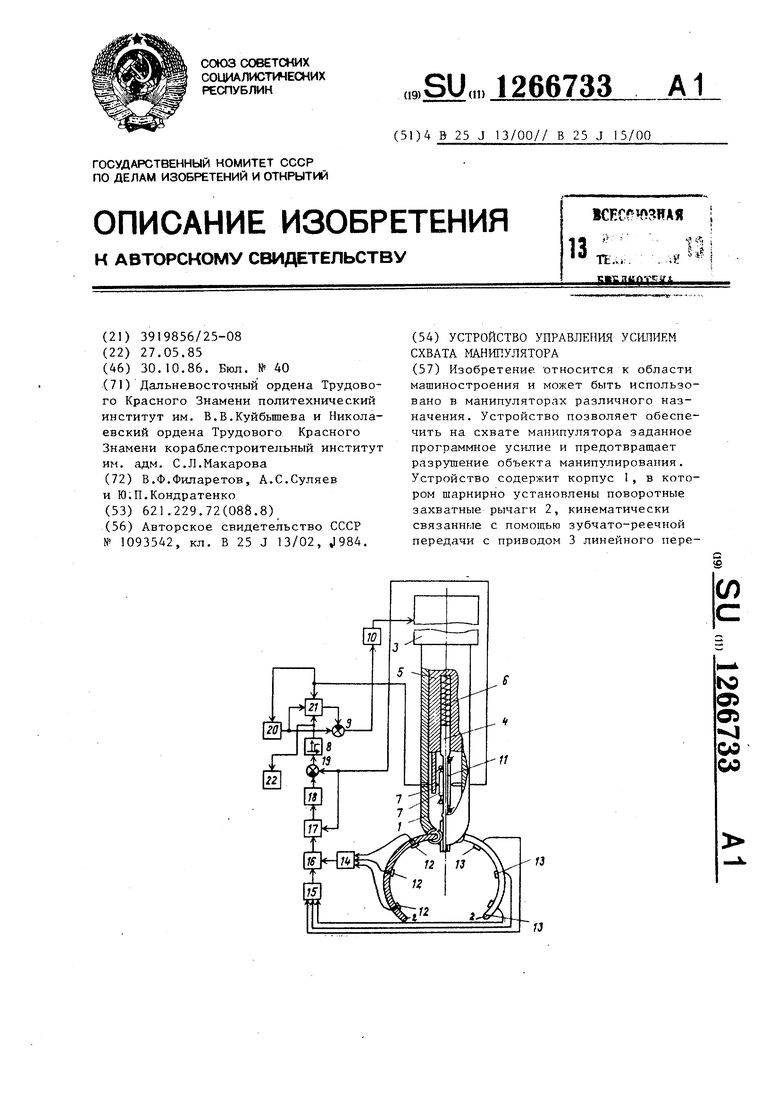
Изобретение относится к мапмностроению и может быть использовано в манипуляторах различного назначения для управления усилием схвата.
Целью изобретения является обеспечение на схвате заданного .программного усилия и предотвращение разрушения объекта управления простыми техническими средствами.
На чертеже представлена функциональная схема устройства управления усилием схвата манипулятора.
Устройство управления усилием схвата манипулятора содержит корпус 1, в котором шарнирно установлены .поворотные захватные рычаги 2, кинематически связанные с помощью зубчато-реечной передачи с приводом линейного перемещения 3, причем рейка 4 подпружинена относительно конечного звена 5 привода 3 с помощью упругого элемента 6, первый датчик положения 7, обмотка которого закреплена на рейке 4, а движок - на конечном звене 5 привода линейного перемещения 3 пороговый элемент 8, последовательно соединенные первый элемент сравнения 9 и усилитель 10, выход которого соединен с входом привода 3, второй
датчик положения 11, тактильные датчики 12 и 13, установленные на рабочей поверхности захватных рычагов 2, первый 14 и второй 15 логические элементы ИЛИ, входы которых подключены соответственно к выходам тактильных датчиков левого и правого захватного рычага 2, а выходы - к первому и второму входам логического элемента
И 16. Кроме того, оно содержит последовательно соединенные первый ключ 17, запоминающее устройство 18 и второй элемент сравнения 19, второй вход которого подключен к движку второго датчика положения 11, обмотка которого закреплена на рейке 4, а движок - на корпусе 1, а его выход соединен с входом порогового элемента 8, nporp iMMHoe устройство 20, выход которого подключен к первому входу первого элемента сравнения 9 и к первому сигнальному входу второго ключа 21, управляющий и второй сигнальный входы которого подключены соответственно к выходу порогового элемента 8 и к движку первого датчика положения 7, а его выход - к второму (отрицательному) входу первого элемента сравнения 9, индикаторное
устройство 22, вход которого соединен с выходом порогового элемента 8 а вход программного устройства 20 с движком первого датчика положения 7.
Устройство работает следующ 1м образом.
После подачи на вход первого элемента сравнения 9 некоторого сигнала (напряжения) с выхода программного устройства 20 на входе усилителя 10 также появляется сигнал, который, усилившись по мощности, поступает на вход привода линейного перемещения 3, состоящего или из гидродвигателя, или из электродвигателя с редуктором Сигнал, поступивший на двигатель, приводит его в движение и в результате в движение будет приведено конечное звено 5 привода. Положим, что сигнал, поступивший на вход двигателя, будет иметь знак, который определяет перемещение звена 5 вверх. Если захватные рычаги 2 еще не касаются объекта, то под действием упругого элемента 6, механически связанного со звеном 5 и рейкой 4, произойдет их смыкание до касания объекта.
После захвата объекта происходит замыкание хотя бы по одному тактильному датчику 12 и 13. .В результате на выходе элемента И 16 появляется сигнал, который размьжает первый ключ 17. При этом в запоминающем устройстве 18 запоминается сигнале выхода второго датчика положения 11, соответствующий положению этого датчика в момент касания объекта. Поскольку в момент касания объекта схватом на входы второго элемента сравнения 19 поступают сигналы, равные по величине и противоположные по знаку, то на вход порогового элемента 8 будет поступать нулевой сигнал. На выходе порогового элемента также будет нулевой сигнал. В результате второй ключ 21 будет соединять выход первого датчика положения 7 с вторым (отрицательным) входом первого элемента сравнения 9. Следует отметить,, что и до момента касания объекта обоими захватными рьтчагами ключ 21 будет замкнут в указанном положении, поскольку на оба входа второго элемента сравнения 19 и до отклонения первого ключа 17 будут подаваться одинаковые по величине сигналы. В результате на выходе порогового элемента 8 сигнал будет отсутствовать.
66733
В момент касания захватными рычагами объекта первый датчик Положения 7 будет находиться практически в нейтральном положении и, следова, тельно, -на его выходе сигнал будет отсутствовать (равен нулю). В результате на вход усилителя 10 от программного устройства 20 по-прежнему будет поступать исходный сигнал, кото Q рый будет обеспечивать перемещение конечного звена 5 вверх.
Если предположить, что захватываемый объект несжимаем, то при перемещении звена 5 вверх рейка 4 будет на15 ходит ься в покое. В результате на выходе, первого датчика положения 7 появится ненулевой сигнал, который начнет уменьшать сигнал, подаваемый на вход усилителя 10. Перемещение звена 20 5 вверх будет происходить до тех пор, пока на выходе элемента сравнения 9 не произойдет обнуление сигнала. А обнуление сигнала произойдет.лшпь .тогда, когда переместившийся движок 25 датчика положения 7 обеспечит появление на выходе этого датчика напряжения, равного напряжению задающего сигнала с выхода программного устройства 20. После остановки звена 5 упругий элемент 6 будет растянут на ве0личну, определяемую величиной сигнала с выхода программного устройства. Усилие растянутого упругого элемента через рейку 4 будет передаваться захватным рычагам 2, которые и обеспечат программное сжатие объекта.
Сигнал обратной связи с датчика положения 7 поступает на вход программного устройства 20. Поэтому после отработки приводом 3 заданного
0 входного воздействия программное устройство 20 выдаст команду на вьшолнение следующей операции.
Величина выходного сигнала, подаваемого с программного устройства на
5 вход первого элемента сравнения, определяет усилие сжатия при захватывании объекта и зависит от жесткости упругого элемента 6. При этом габа.ритные размеры объекта никакого влия0ния на величину выходного сигнала программного устройства не оказывают, так как растяжение элемен а 6 начнется только после касания объекта захватными рычагами независимо от того, 5 когда это касание произойдет.
Если после касания объекта захватными рычагами произойдет его деформация, то рычаги начнут сжиматься и на выходевторого датчика положения 11 произойдет изменение выходного напря жения в сторону его увеличения. В ре зультате на выходе второго элемента сравнения 19 появится положительный сигнал, который при некоторой величи не деформации объекта приведет к сра батьгоанию порогового элемента 8 и, следовательно, к переключению второго ключа 21 на выход программного устройства 20. Таким образом, на входы первого элемента сравнения 9 поступят равные по величине сигналы. Это в свою очередь приведет к остановке привода 3, а значит и к прекращению сжатия объекта. Поскольку сжатие объекта прекратится досрочно и осуществится не в полной мере (не будет соответствовать сигналу с выходу программного устройства), то сигнал обратной связи с выхода первого датчика положения 7 не достигнет требуемой величины. В результате на вход программноно устройства нужный сигнал о вьшолнении задания (о заданном усилии сжа тия объекта) не поступит. Следовательно, не произойдет и дальнейшего выполнения операций. При этом ий формации о создавшейся ситуации от выходного сигнала порогового элемента 8 сработает индикаторное устройст во 22. После аварийной остановки псх желанию оператора программа вьшолнения операций может быть продолжена или может быть изменено место захвата объекта. Величина порога срабатывания элемента В определяется величи ной допустимой деформации для захватьшаемых объектов. Она может меняться при работе с различными объектами. Для разжатия захватных рычагов в случае, если не произошло аварийного останова, достаточно обнулить сигнал с выхода программного устройства 20. В этом случае сигнал с выхода пер вого датчика положения 7 обеспечит реверсивное движение привода. 3 до разжатия рычагов 2 схвата и выбрасывания захваченного объекта. После разжатия рычагов вновь замыкается первьм ключ 17 и устройство готово к вьтолнению захвата нового объекта, Если следующий объект име1ет большие габариты, чем предыдущий, то на выходе программного устройства должно 336 появиться малое по величине напряжение (противоположного знака) , которое приведет к разжатию захватных рычагов до предельного значения (до упора). Дальнейшая работа привода 3 обеспечит перемещение конечного звена 5 вниз при неподвижном положении рейки 4. В результате произойдет сжатие элемента 6 и на выходе первого датчика положения 7 появится сигнал, который обеспечит обнуление сигнала на входе усилителя 10, а следовательно , и привода 3. Поступивший на вход программного устройства 20 сигнал обратной связи (с выхода первого датчика положения 7) обеспечит обнуление выходного сигнала программного устройства. После этого сигнал, постyпaюшJ й с выхода первого датчика положения 7 на второй вход первого элемента сравнения, обеспечит перемещение звена 5 вверх до исходного (нейтрального) положения упругого элемента 6. При этом захватные рычаги 2 будут полностью разжаты и манипулятор будет готов к захвату нового большего по габаритам объекта. Если при захватывании легко деформируемого объекта произойдет аварийный останов устройства (в момент предельно возможной деформации), то для приведения устройства в исходное положение (разжатие захватных рычагов) необходимо, чтобы оператор вручную обнулил выходной сигнал программного устройства 20 и переключил второй ключ 21 на выход первого датчика положения 7, вручную увеличив порог срабатывания порогового элемента 8. После увеличения порога на выходе элемента 8 сигнал обнуляется и второй ключ 21 переключается на выход первого датчика положения 7. Поскольку на первьй вход элемента сравнения 9 сигйал, отличный от нуля, уже не поступает, а на второй вход поступает сигнал от первого датчика положения 7, то привод 3 будет перемещать 5 вниз, что приведет к разжатию захватных рычагов и выбрасыванию объекта. Движение привода 3 будет происходить до обнуления сигнала с .выхода первого датчика положения. После приведения устройства в исходное положение (элемент 6 не деформирован) на пороговом элементе 8 вновь выставляется требуемый порог. Практическая реализация предлагае мого устройства не вызывает затруднений, так как в нем используются только типовые электронные элементы и типовое программное устройство, например УПМ-772, УКМ-552 или УКМ-772 и др. Формула изо б.р е т е н и я Устройство управления усилием схвата манипулятора, содержащее корпус, в котором шарнирно установлены поворотные захватные рычаги, кинематически связанные с помощью зубчатореечной передачи с приводом линейного перемещения, причем рейка подпружинена относительно конечного звена привода, первьй датчик положения, обмотка которого закреплена на рейке, а движок - на конечном звене при вода линейного перемещения, последовательно соединенные первый элемент сравнения и усилитель, выход которого соединен с входом привода линейно го перемещения, тактильные датчики, установленные на рабочей поверхности захватных рычагов, первый и второй логические элементы ИЛИ, входы которых подключены к выходам тактильных датчиков левого и правого захватных рьгчагов соответственно, а выходы к первому и второму входам логическо 338 го элемента И, второй элемент сравнения и первый ключ, отличающееся тем, что, с целью обеспечения на схвате заданного программного усилия и предотвращения разрушения объекта манипулирования, в него дополнительно введены второй ключ, запоминающее устройство, вход которого соединен с выходом первого ключа, а выход - с первым входом второго элемента сравнения, программное устройство, выход которого подключен к первому входу первого элемента сравнения и к первому сигнальному входу второго ключа, управляющий вход которого в свою очередь подключен к выходу порогового элемента, а выход второго ключа подключен к второму входу первого элемента сравнения, индикаторное устройство, вход которого соединен с выходом порогового элемента, причем вход программного устройства и второй сигнальный вход второго ключа соединены с движком первого датчика положения, управляющий вход первого ключа соединен с выходом логического элемента И, а его сигнальный вход и второй вход второго элемента сравнения подключены к закрепленному на корпусе движку второго датчика положения, обмотка которого закреплена на рейке, и выход второго элемента сравнения соединен с входом порогового элемента.
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
