Изобретение относится к машиностроительной промьш1ленности и может быть реализовано при создании и разработке захватных устройств прог аппленных роботов и манипуляторов.
Целью изобретения является расширение технологических возможностей.
,На фиг.1 изображено устройство (взяты три изделия из стопы), общий вид; на фиг.2 - то же, схематично (при полной загрузке охвата).
Захватное устройство содержит упругие замкнутые ленты 1 с равномерно закрепленными держателями 2, запасованные через блоки 3, смонтированные на концах направляющих 4. Ленты 1 и направляющие 4 имеют соответственно приводы 5 и 6, работа которых согласована друг с другом посредство системы управления, включающей задат чик программ 7, управляющий 8 и вычислительньш 9 блоки. Захватное устройство смонтировано на руке манипулятора 10, Захватное устройство работает следующим образом. Рукой манипулятора 10 захватное устройство перемещают к стопе изделий, предназначенных для гальваничес кой обработки, при этом нижние блоки 3 направляющих 4 устанавливают симметрично над верхом стопы. Затем включают , автоматический режим, посл чего направляющие 4 посредством привода 6 опускаются по боковым сторона стопы, как бы охватывая последнюю, а ленты 1 посредством привода 5 перемещаются вокруг блоков 3 так, что внутренние ветви лент 1 движутся вверх. Скорость перемещения ленты 1 V, (м/с) и скорость опускания направ ляющих Vj, (м/с) согласуются между . собой посредством системы управления С задатчика программ 7 через вычислительный блок 9 подается сигнал на управляющий блок 8, который обеспечивает- синхронизацию работы приводо 5 и 6 так, чтобы V, V( + ( й- & ) /t, где t - интервал времени опускания направляющих на величину S . Приведенная формула показывает, что за
время i направляющие 4 опустятся на расстояние S , а держатели 2 внутрен них ветвей ленты 1 поднимутся на высоту i , большую в 1,15-1,2 раза,
чем 6 т.е. верхнее изделие поднимается над стопой на высоту (л-о). По мере дальнейшего опускания направляющих на такую же высоту от стопы за время t поднимается второе сверху
изделие и т.д. После захвата всех изделий стопы каждое будет отделено друг от друга на величину (А-6). Затем рукой манипулятора 10 изделия помещают в гальваническую ванну, после обработки перемещают руку манипулятора 10 с готовыми изделиями в накопитель и включают реверсивный автоматический режим: ленты 1 перемещаются в обратную сторону (внутренние ветви опускаются со скоростью - М , а направляющие поднимаются со скоростью - Vц , Обработанные изделия в стопе остаются в накопителе, и далее цикл повторяется. « Расширение технологических возможностей в операциях, подобных гальванизации, заключается в том, что за один цнкл качественной обработке подвергаются одновременно несколько изделий, так как рабочая жидкость омывает всю поверхность каждого изделия ввиду того, что они отделены друг от друга на заданный зазор. Формула изобретения Захватное устройство, содержащее основание, корпус, размещенные в направляющих корпуса упругие ленты с держателями, привод перемещения упругих лент, отличающееся тем, что, с целью расширения технологических возможностей, корпус установлен на основании с возможностью перемещения в направляющих, гибкие ленты выполнены замкнутыми и размещены на двух парах направляющих блоков, связанных с приводом, причем прямолинейные участки лент параллельны направляющим корпуса.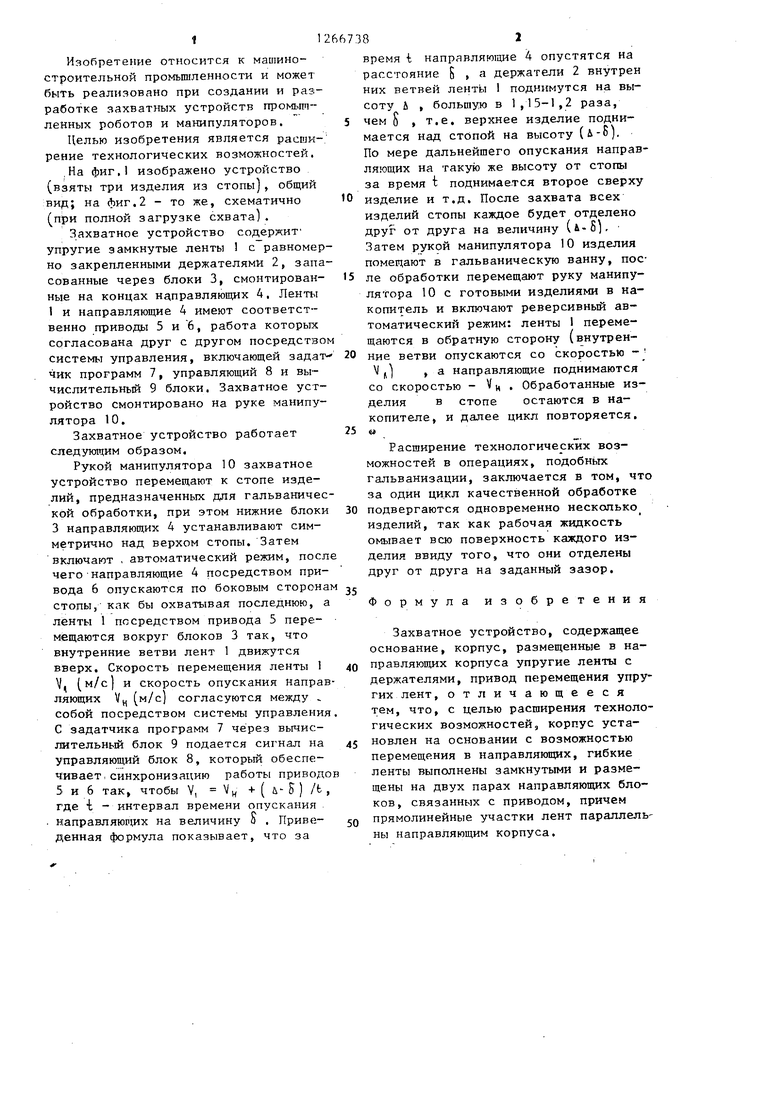
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Манипулятор | 1980 |
|
SU910409A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| СТОПИРОВЩИК ТОНКОСТЕННЫХ ИЗДЕЛИЙ | 2023 |
|
RU2799178C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| УСТРОЙСТВО ДЛЯ ЛАМИНИРОВАНИЯ ЛИСТОВ СТЕКЛА | 2005 |
|
RU2374192C2 |
| Сборочный центр | 1985 |
|
SU1311908A1 |
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КИРПИЧЕЙ | 1995 |
|
RU2054354C1 |
| УПАКОВОЧНЫЙ АППАРАТ | 2009 |
|
RU2536445C2 |

Изобретение относится к области машиностроения и может быть использовано в манипуляторах. Целью изобретения является расширение технологических возможностей. Рукой манипулятора захватное устройство перемещают к стопе изделий. Гибкие ленты :, размещенные на двух парах блоков 3, рас-гполагаются по обе стороны от стопы деталей. Захватное устройство опускается на стопу, а внутренние ветви гибких лент 1 перемещаются вверх, поднимая держателями2 детали из стопы. Скорости перемещения захватного устройства и гибких лент регулируются системой управления. 2 ил. п § (Л стЧЧ Т Р N л О) о: со 00 аг./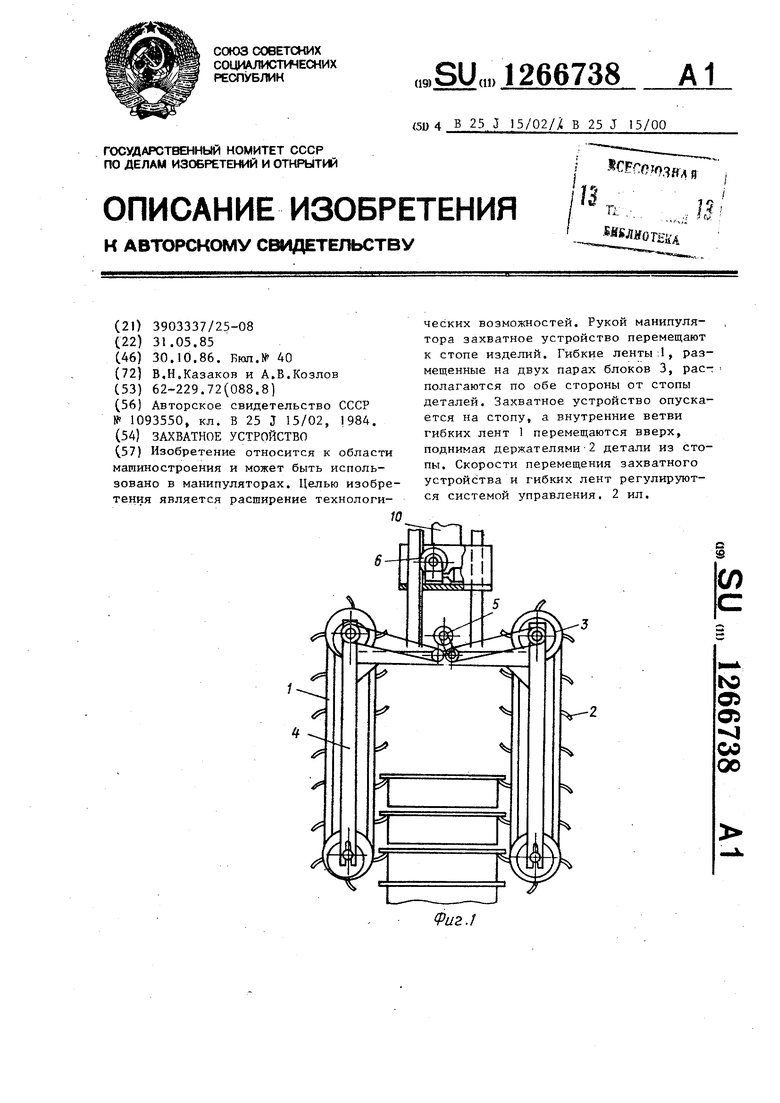
| Схват манипулятора | 1983 |
|
SU1093550A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
