(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1972 |
|
SU441141A1 |
| Манипулятор | 1990 |
|
SU1754435A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Манипулятор | 1980 |
|
SU975383A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Автоматическая линия | 1984 |
|
SU1187962A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Линия по производству цилиндрических изделий | 1985 |
|
SU1449195A1 |
| Линия для изготовления деталей из штучных заготовок | 1984 |
|
SU1232340A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
1
Изобретение относится к робототехнике и может быть использовано при автоматизации и комплексной механизации процессов изготовления резиновой обуви и других изделий из пластификатов.
Известен манипулятор, выполненный в виде тележки с установленными на ней приводами и механической руки со схватом, состоящим из корпуса, в который вмонтированы шариковая опора и втулка, установленная вертикально и соединенная в верхней части с пружинами, а в нижней части - с присосом 1. .
Однако известный манипулятор не обладает возможностью вырезания изделий из тонколистовой резины.
Цель изопретения - расширение технологических возможностей манипулятора.
Цель достигается тем, что в предлагаемом манипуляторе схват снабжен рабочим органом и поводком, а тележка снабжена фиксатором и механизмом сцепления с конвейером, при этом поводок закреплен на втулке между
шариками шариковой опоры и предназначен для взаимодействия с фиксатором тележки:
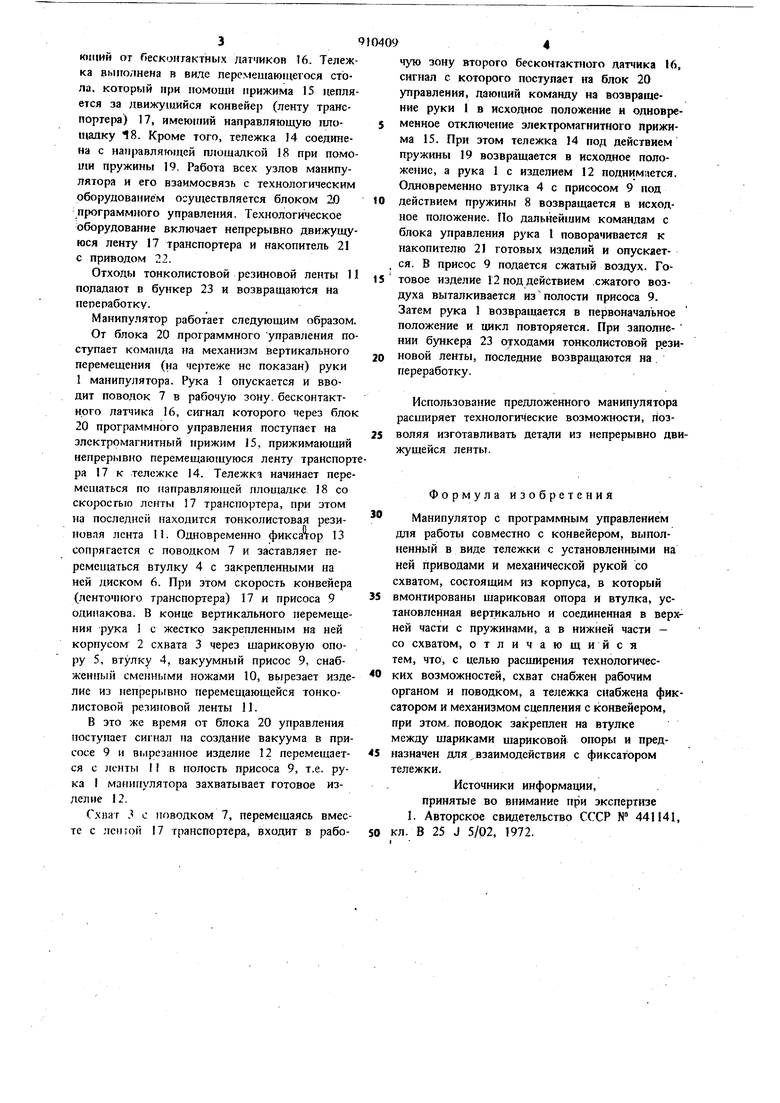
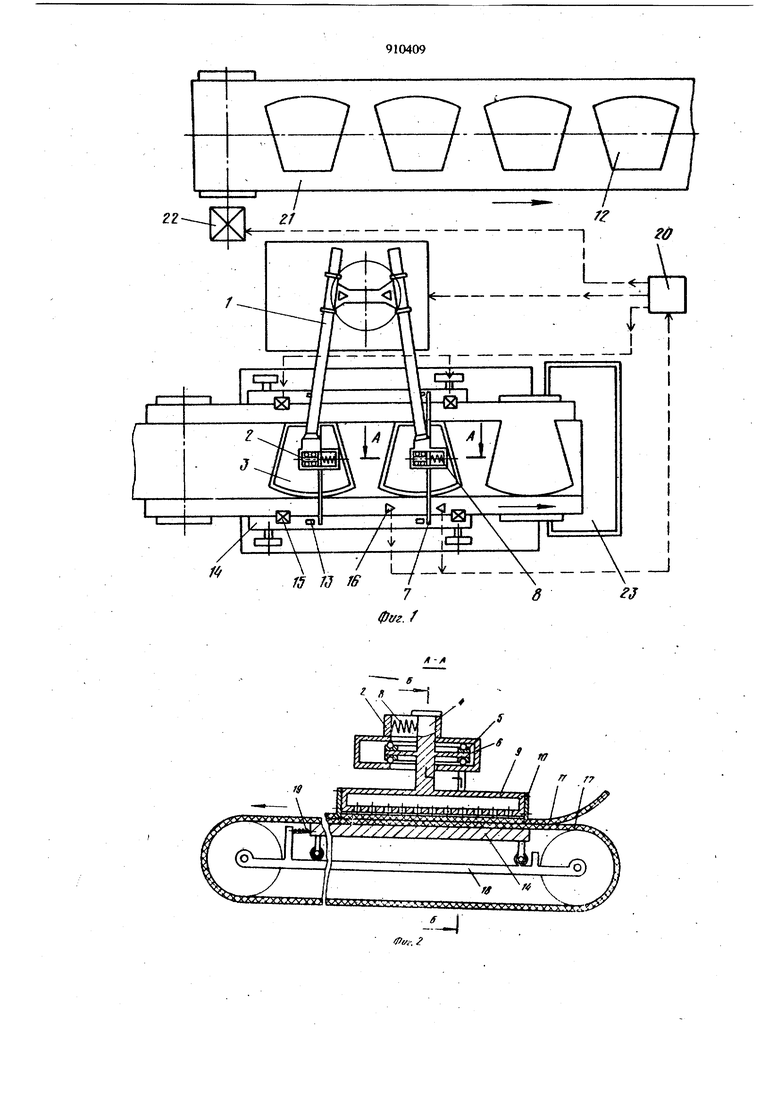
На фиг. 1 изображен предаагаемый манипулятор с технологическим оборудованием, вид в плане; на фиг. 2 - разрез А-А на
5 фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - вид по стрелке В корпуса схвата.
Манипулятор имеет две механические руки 1, на каждой из которых жестко установлен корпус 2 со схватом 3. Схват содержит втул10 J ку 4, соединенную с корпусом 2 схвата при помощи шариковой опоры 5, в которой расположен диск 6, жестко соединенный с втулкой 4 и поводком 7. Втулка 4 также соединена в верхней части с корпусом 2
5 при помощи пружинь 8, а в: нижней части с присосом 9, на котором установлены иожи 10, расположенные по форме вырезаемого из непрерывно движущейся тонколистовой ленты 11 сырой резины изделия 12.
20
Поводок 7 сопрягается в момент выреза- . ния изделия 12 -с фиксатором 13, установленным на тележке 14, на которой установлен , также электромагнитный прижим 15, срабатыва3ющий от бесконтактных датчиков 16. Тележка выполнена в виде переметающегося стола, который нри помощи прижима 15 цепляется за движущийся конвейер (ленту транспортера) 17, имеющий направляющую плоП1адку 18. Кроме того, тележка 14 соединена с направляющей площадкой 18 при помощи пружины 19. Работа всех узлов манипулятора и его взаимосвязь с технологическим оборудованием осуществляется блоком 20 прюграммного управления. Технологическое оборудовагсие включает непрерывно движущуюся ленту 17 транспортера и накопитель 21 с приводом 22. Отходы тонколистовой резиновой ленты 11 поладают в бункер 23 и возвращаются на переработку. Манипулятор работает следующим образом. От блока 20 программного управления по ступает команда на механизм вертикального перемещения (на чертеже не показан) руки 1 манипулятора. Рука I опускается и вводит поводок 7 в рабочую зону, бесконтактного датчика 16, сигнал которого через блок 20 программного управления поступает на электромагнитный ггрижим 15, прижимающий непрерывно перемещающуюся ленту транспорт ра 17 к тележке 14. Тележка начинает перемещаться по аправляющей площадке 18 со скоростью ленты 17 транспортера, при этом на последней находится тонколистовая резиновая лента 11. Одновременно фиксатор 13 сопрягается с поводком 7 и заставляет перемещаться втулку 4 с закрепленными на ней диском 6. При зтом скорость конвейера (ленточного транспортера) 17 и присоса 9 одинакова. В конце вертикального перемещения рука 1 с жестко закрепленным на ней корпусом 2 схвата 3 через шариковую опору 5, втулку 4, вакуумный присос 9, снабжен1п 1Й сменными ножами 10, вырезает изделие из непрерывно перемещающейся тонколистовой резиновой ленты 11. В это же время от блока 20 управления поступает сигнал на создание вакуума в присосе 9 и вырезанное изделие 12 перемещается с ленты 11 в полость присоса 9, т.е. рука I манипулятора захватывает готовое изделие 12. Гхиат 3 с поводком 7, перемещаясь вместе с лептой 17 транспортера, входит в рабоч то зону второго бесконтактного 16, сигнал с которого поступает на блок 20 управления, дающий команду на возвращение руки 1 в исходное положение и одновременное отключение электромагнитного прижима 15. При зтом тележка 14 под действием пружины 19 возвращается в исходное положение, а рука 1 с изделием 12 поднимается. Одновременно втулка 4 с присосом 9 под действием пружины 8 возвращается в исходное положение. По дальнейщим командам с блока управления рука 1 поворачивается к накопителю 21 готовых изделий и опускается. В присос 9 подается сжатый воздух. Готовое изделие 12 под действием сжатого воздуха выталкивается из полости присоса 9. Затем рука 1 возвращается в первоначальное положение и цикл повторяется. При заполнении бункера 23 отходами тонколистовой резиновой ленты, последние возвращаются на . переработку. Использование предложенного манипулятора расширяет технологические возможности, позволяя изготавливать из непрерывно движущейся ленты. Формула изобретения Манипулятор с программным управлением для работы совместно с конвейером, выполненный в виде тележки с установленными на ней приводами и механической рукой со схватом, состоящим из корпуса, в который вмонтированы щариковая опора и втулка, установленная вертикально и соединенная в верхней части с пружинами, а в нижней части со схватом, отличающийся тем, что, с целью расдшрения технологических возможностей, схват снабжен рабочим рганом и поводком, а тележка снабжена фикатором и механизмом сцепления с конвейером, при зтом, поводок закреплен на втулке между щариками щариковой опоры и предазначен для взаимодействия с фиксатором ележки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 441141, л. В 25 J 5/02, 1972.
Г
ffi/f. 2
