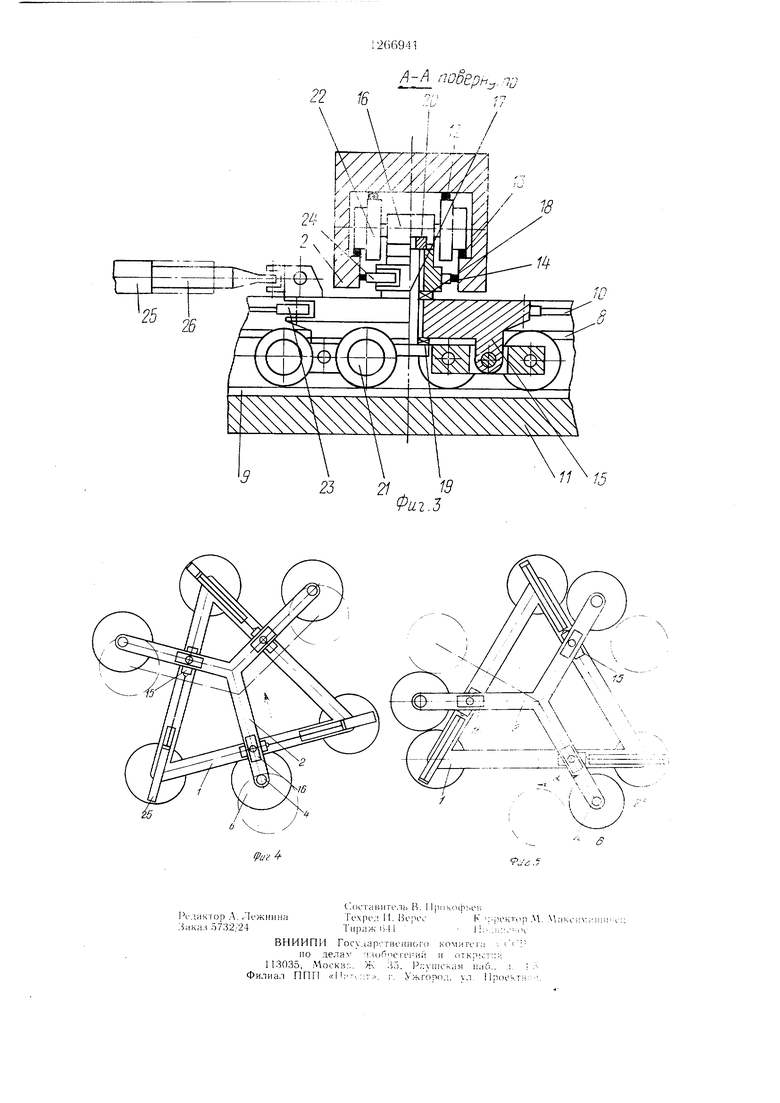
Изоб)сте11ис относится к ходовым мехаjii гмам. а именно ix Н1агаюн1им механизмам. Цель изобрете1Н1и )ас1нпрение технологических возможностей и упрощение коиструкции. На фиг.1 изображен предлагаемый механизм, иид сбоку; на фиг.2 - то же, вид и нлане; на фиг.З -- разрез .А. - А иа фиг.2; на фиг.4 - схема механизма при неремеН1ении машины, вид в нлане; на фиг.З - схема механизма нрн новороте ма1нины, вид в плане. Шагающе-рельсовый механизм еоетоит из опорной рамы 1 и рабочей нлатформы 2, выполненных в виде жестких рам, имеющих в нлане форму равносторонних треугольников, в вершинах углов которых установлены гидродомкраты 3 и 4 с ншрнирно закрепленными на концах их штоков опорными баншаками 5 и 6. Опорная рама 1 имеет три прямолинейных направляюгпих 7 с верхними 8, нижними 9 и боковыми 10 рельсами. Нанравляюни1е 7 размещены но периметру опорной рамы 1. Рабочая нлатформа 2 содержит три прямолинейных направляющих И, жестко закрепленных на рабочей платформе 2 в нанравлеиии биесектрис равностороннего треугольника. На каждой направляющей 11 установлены верхние 12, нижиие 13 и боковые 14 рельеы. На каждой нанравляюн1ей 7 и 11 установлено но одной ходовой тележке. Ходовые тележки 15 и 16 Horiapno соединены между собой вертикальпы.мп осями 17, которые вместе е упорными под1нинниками 18 и 19 и гайками 20 образуют 1иарнирные соединения ходовых тележек 15 и 16 между собой в горизонтальной плоскости. Катки 21 ходовых тележек 15 подвижно установлены между ве|.1хними 8 и нижними 9 рельсами направляюпи1х 7, а катки 22 ходовых те.:1сжек 16 между верхними 12 и нижними 13 рельсами нанравляюни1х 11. На ХОДОВ1..1Х ге..ежках 15 и 16 зак)еплены горизонтальные ка1ки 23 и 24, которые, к)1ггакти|)уя с боков1)1ми )ельсами 10 и 14, ог1)апичиваюг П()пе1)ечиое смеи1ение ходовых тележек 15 и 6. В углах опорной плиты 1 корпуса горизонтальных гидродомкратов 25, щтоки 26 которых присоединепы ншрнирно к корпусам тележек 15. В рабочем ноложенип (фиг.1) П1агаюп1ерельсовый механизм опирается на грунт бан1маками 5, HITOKH гидродомкратов 4 при этом втянуты, а багпмаки 6 приподняты над грунтом. Перемеп1ение осуществляется с помощью горизонтальных гпдродомкратов 25 подачей рабочей жидкости в их одноименные или разноименные полости. Выравнивание усилий в гидродомкратах 25 при этом осуществляется введением дроссели)уюп1их устройств в схему гидропривода. При KpyiOBOM движении рабочей платформы 2 рабочая жидкостьподается одновременно в одноименные полости гидродомкратов 25. Нри неремещении на больп1ие расстояния и повороте машипы на болылой угол гидродомкраты 3 и 4 выдвижением или втягиванием своих штоков обеспечивают поочередное опирание па грунт 6aHJMaKOB 5 и 6. Формула изобретения Шагаюпхе-рельсовый механизм, включающий опорную раму, н.1атформу, гидродомкраты с опорными ба1нмаками, ходовые тележки с вертикалыпз1ми катками, направляюн;ие и горизонтально распо.юженные гидродомкраты, отличающийся тем, что. с целью |)асн1ирения техно,1О1ических возможностей и унроп1е11ия конструкции, опорная ра.ма и платформа выполнены по форме )авносторонних т|)еуго.;1ьпнкогз, в yr,iax которых расположены гидродомкраты с oпopны)и баншаками, при этом направляющие расположены но сторонам опорной и но нанрав, биссектрис yiMOB 1,1атфо 1мы и снабжены боковыми ре.1ьсами, а ходовые те,:1ежкн нонарно соединены собой с HOMonibK) вертикальной оси, расположены в нанрав;1яющих и снабжены горизонта,пд-1Ы%; 1 роликами с возможностью х взаимодействия с боковыми )ельса ;и, н|Л1чем горизоптальпо )ас положенные гид 1пдомкраты соединены с ходовыми тележками и опорной )амой.
5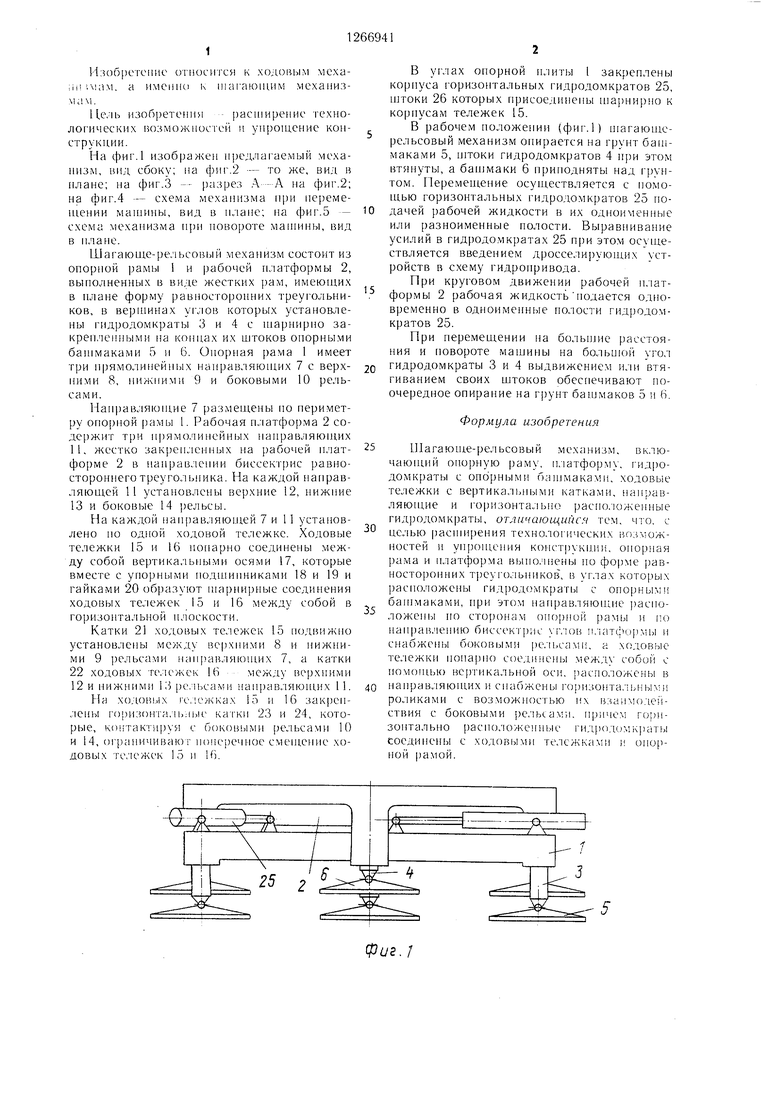
| название | год | авторы | номер документа |
|---|---|---|---|
| Отвалообразователь | 1978 |
|
SU754072A1 |
| Ходовое оборудование тяжелых машин | 1978 |
|
SU981522A1 |
| Ходовой механизм горной машины | 1990 |
|
SU1738941A1 |
| Устройство для смены комплектов рабочих и опорных валков с подушками непрерывной группы прокатных клетей | 1989 |
|
SU1620165A1 |
| Устройство для транспортирования преимущественно тяжелых слябов | 1980 |
|
SU933150A1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1330338A1 |
| Напольный штанговый конвейер | 1986 |
|
SU1411239A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВКИ | 1970 |
|
SU287051A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Стенд для испытания гусеничного движителя | 1990 |
|
SU1755091A1 |
Изобретение относится к ходовым механизмам и позволяет раси1и)ить техиоло нческие возможности и упростить конструкцию механизма. Для vToro его опорная рама (Р) 1 и платформа (И) 2 .;1нены но форме равносторонних T)eyr().ibiiiiKoii, li угла.х которы.х рас11о.1ожеи1 1 Г1.д)о;;имк)аты с опорнымн бан1 1акам11 (Б) 5 и (. По сторонам Р 1 и но наирав.юник бпссектрнс yiлов П 2 расиоложе1П)1 Haiipaii.iHR)iiuic 7 и П. снабженные боковыми ре.чьсами. На каж.чо направляюпюй устапов.ено по одноГ) xo.ioiuiii тележке с ве)тика, ьным11 катками. Тс.чсжки нонарно соединены ieждy co6oii всртика.1ьными осями 17 и снабжен1 1 горизонта,1ьными ()о.чиками с возможносгью их взаимодействия с боковыми pe.ii)C;iMH. С. толсжками и Р I соединены 1-оризонта.Н)Н1) направленные гидродомкраты 25. В рабочем положении механизм оинрается на rpyiiv Б 5. а Б 6 г1;)И1К)днят1)1. К-рсменюнис осуиичтвляется с HOMOHibK) шдро.чомкр.атов 25 пою дачей рабочей жпдксхти в их о.чноименныс и,1и )азноимениые по.юсти. При круговом (Л двнженпп П 2 жидкость по.тается o;uioвременно в o.UKViiMCHiibie нолости гпд 1одомкратов 25. При HepcMeineinui на больнше рас стояния осункчтн,1ястся 1Оочерсдное оиирание на грунт Б 5 и 6. 5 и,;. t С5 о CD 4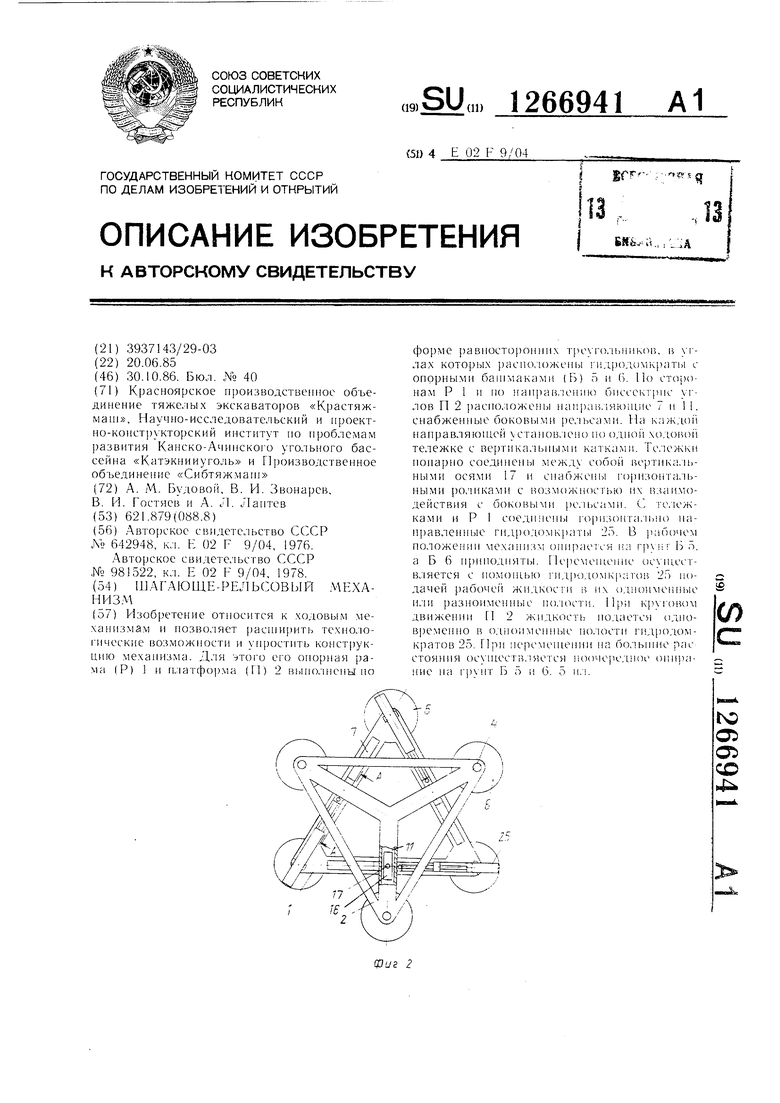
| .Авторское свидетельство СССР До 642948, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ходовое оборудование тяжелых машин | 1978 |
|
SU981522A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
