10 относительного перемещения блока 4 и КЭ 6, узла 7 блокировки и центрального пульта 22 с органами управления. Зажатая в зажиме БТ опускается в скважину и удерживается КЭ 6, контактирующим с узлом 7. Сигнал о передаче веса от КЭ 6 з&хвату поступает с пульта 22 в блок 9 только при отсутствии сигнала с датчика 10. С блока 9 сигнал поступает на ИМ 30. После передачи веса с пульта 22 в
блок 9 поступает сигнал, который включает ИМ 31, открывающий захват КЭ 6. При неудержании веса БТ захватом узел 7 блокирует открытие КЭ С узла 7 сигнал поступает на пульт 22, который через блок 9 включает аварийную сигнализацию. На ИМ 31 пр этом поступает сигнал с блока 9 на закрытие КЭ 6. Блок 9 вьшолнен на логических элементах. 1 з.п.ф-лы, 3 ил.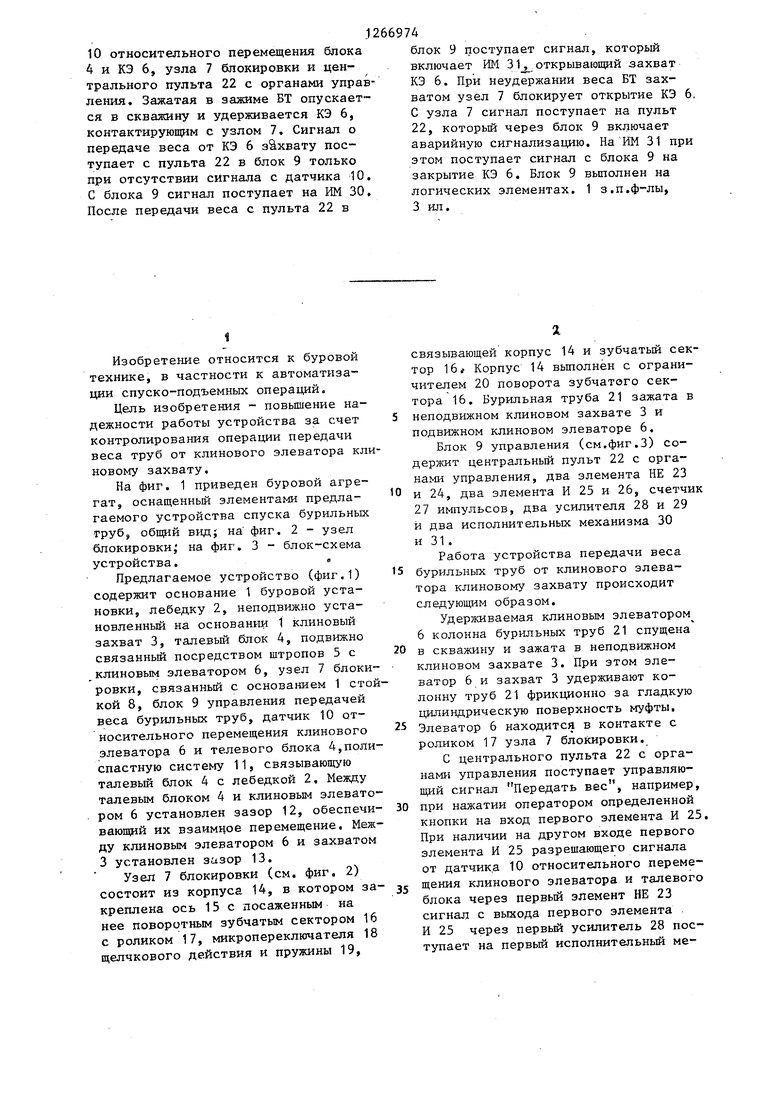
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для спуска и подъема бурильной колонны | 1981 |
|
SU1027376A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЬЕМНЫХ ОПЕРАЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324812C1 |
| Устройство для управления спуско-подъемными операциями на буровых установках | 1986 |
|
SU1357551A1 |
| Устройство для спуска и подъема бурильной колонны | 1973 |
|
SU574517A1 |
| Автомат для спуско-подъемных операций в бурении | 1974 |
|
SU629314A1 |
| Устройство для спуско-подъема бурильных труб | 1981 |
|
SU977738A1 |
| Устройство для остановки поднимаемой бурильной колонны | 1986 |
|
SU1332003A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ КОЛОННЫ ТРУБ, СПУСКАЕМОЙ В СКВАЖИНУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714167C1 |
| Устройство для автоматического управления приводом буровой лебедки при спуско-подъемных операциях | 1980 |
|
SU991035A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ, СПУСКАЕМЫХ В СКВАЖИНУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2753907C1 |
Изобретение предназначено для автоматизации спуско-подъемных операций при бурении и повьшает надежность работы устройства за счет контроля операции передачи веса бурильных труб (ВТ) от клинового элеватора (КЭ) 6 клиновому захвату. С лебедкой 2 и связанным с КЭ 6 талевым блоком 4 соединены исполнительные механизмы (ИМ) 30 и 31. Входы ИМ 30 и 31 соединены с выходом блока 9 управления передачей веса ВТ. К входам блока 9 подключены выходы датчика (Л го а о: о 4;: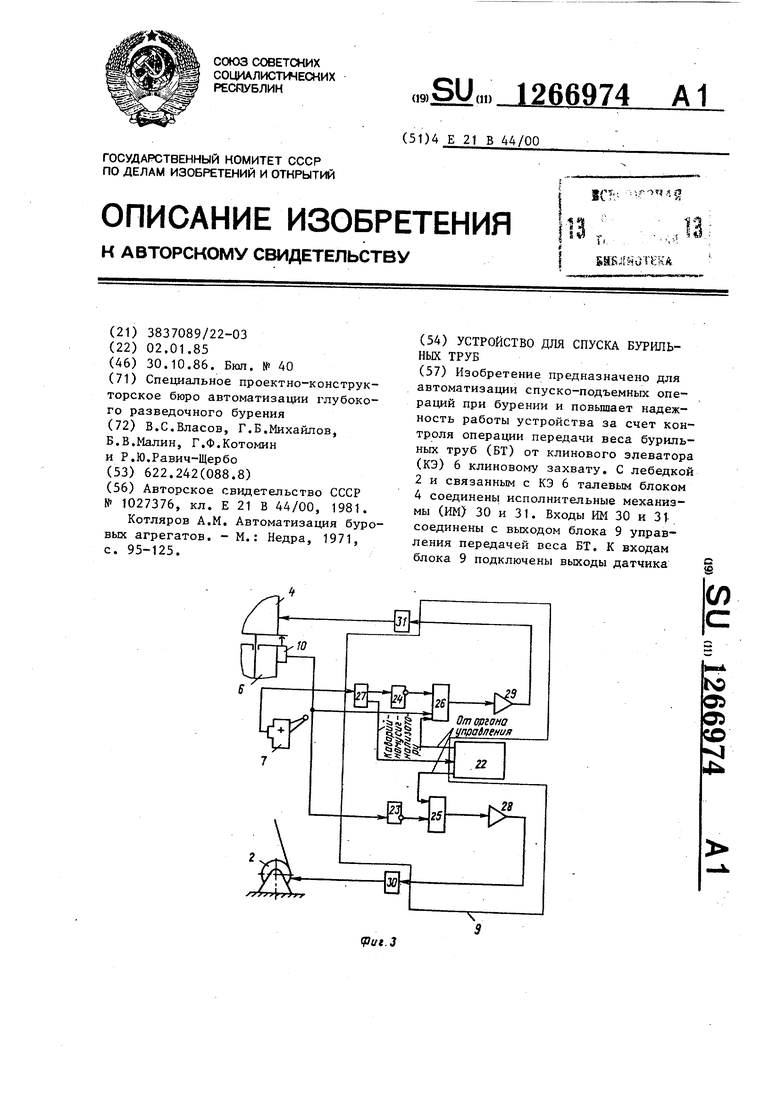
Изобретение относится к буровой технике, в частности к автоматизации спуско-подъемных операций.
Цель изобретения - повышение надежности работы устройства за счет контролирования операции передачи веса труб от клинового элеватора клиновому захвату.
На фиг. 1 приведен буровой агрегат, оснащенньй элементами предлагаемого устройства спуска бурильных груб, общий вид5 на фиг. 2 - узел блокировки; на фиг. 3 - блок-схема устройства.«
Предлагаемое устройство (фиг.1) содержит основание 1 буровой установки, лебедку 2, неподвижно установленный на основании 1 клиновый захват 3, талевый блок 4, подвижно связанный посредством штропов 5 с клиновым элеватором 6, узел 7 блокировки, связанный с основанием 1 стойкой 8, блок 9 управления передачей веса бурильных труб, датчик 10 относительного перемещения клинового элеватора 6 и телевого блока 4,полиспастную систему 11, связывающую талевый блок 4 с лебедкой 2. Между талевым блоком 4 и клиновым элеватором 6 установлен зазор 12, обеспечивающий их взаимцое перемещение. Между клиновым элеватором 6 и захватом 3 установлен зазор 13.
Узел 7 блокировки (см. фиг. 2) состоит из корпуса 14, в котором закреплена ось 15 с посаженным на нее поворотным зубчатым сектором 16 с роликом 17, микропереключателя 18 щелчкового действия и пружины 19,
связывающей корпус 14 и зубчатый сектор 16 Корпус 14 вьшолнен с ограничителем 20 поворота зубчатого сектора 16. Бурильная труба 21 зажата в
неподвижном клиновом захвате 3 и подвижном клиновом элеваторе 6,
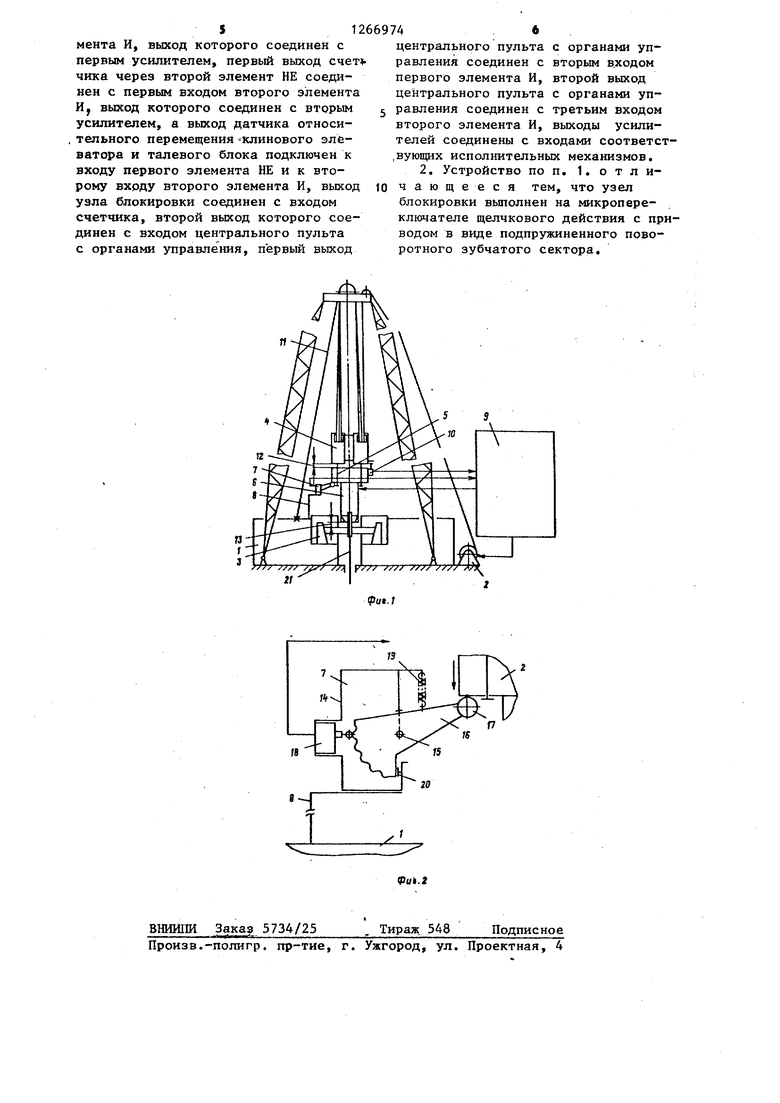
Блок 9 управления (см,фиг.3) содержит центральный пульт 22 с органами управления, два элемента НЕ 23
и 24, два элемента И 25 и 26, счетчик 27 импульсов, два усилителя 28 и 29 и два исполнительных механизма 30 и 31.
Работа устройства передачи веса
бурильньгх труб от клинового элеватора клиновому захвату происходит следующим образом.
Удерживаемая клиновым элеватором 6 колонна бурильных труб 21 спущена
в скважину и зажата в неподвижном клиновом захвате 3. При этом элеватор 6 и захват 3 удерживают колонну труб 21 фрикционно за гладкую цилиндрическую поверхность муфты.
Элеватор 6 находится в контакте с роликом 17 узла 7 блокировки.
С центрального пульта 22 с органами управления поступает управляющий сигнал Передать вес, например,
при нажатии оператором определенной кнопки на вход первого элемента И 25. При наличии на другом входе первого элемента И 25 разрешающего сигнала от датчика 10 относительного перемещения клинового элеватора и талевого блока через первый элемент НЕ 23 сигнал с выхода первого элемента И 25 через первый усилитель 28 поступает на первый исполнительный механизм 30, которьм приводит в действие лебедку буровой установки 2, .и происходит ослабление талевой сис темы и спуск талевого блока, т.е. передача веса от клинового элеватор 6 клиновому захвату 3. Если клиновы захват 3 надежно удерживает колонну труб 2-1, то зазор 13 не изменяется, так как клиновый элеватор 6 остается неподвижным на зажатой в нем трубе в то время, как талевьШ блок 4 опускается, а зазор 12 уменьшаетс |Датчик 10 относительного перемещени КЛИНОВОГО элеватора и талевого блок срабатывает и через элемент НЕ 23 снимает разрешающий сигнал с первого элемента И 25 на спуск тале вого блока 4. Спуск талевого блока 4 прекращается, передача веса произ ведена. Отсутствие перемещения.клин вого элеватора 6 является причиной отсутствия импульсов перемещения, фиксируемых узлом блокировки, счетчик 27 импульсов не работает, отсутствие сигнала с выхода счетчика 27 через второй элемент НЕ 24 формирует разрешающий сигнал на первом входе второго элемента И 26, на вто рой вход которого поступает разрешающий сигнал от датчика 10 относительного перемещения. После окончания передачи веса и остановки лебедки с центрального пульта 22 с органами управления пос тупает управляю1ций сигнал Открыть элеватор на третий вход второго элемента И 26, который (при наличии указанных разрешающих сигналов на двух других входах) с выхода вто рого элемента И 26 через, второй уси литель 29 поступает на второй испол нительный механизм 31, открывающий захват клинового элеватора 6. Происходит открытие захвата клинового элеватора 6.После подъема талевого блока 4 с клиновым элеватором 6 в верхнее положение за следующей свечой, спус ка талевого блока 4 с клиновым элеватором 6, который удерживает колон ну со следующей свечой, в нижнее положение и закрытия клинового захвата 3 работа схемы и механизмов устройства повторяется. Если клиновый захват 3 не удерживает колонну, т.е. колонна труб 21 при спуске талевого блока 4 проскальзывает в клиновом захвате 3 и клиновьй- элеватор 6 перемещается вместе с зажатой в нем трубой, то перемещение клинового элеватора 6 через ролик 17 узла блокировки 7 вызывает поворот зубчатого сектора 16, который воздействует на кнопку микропереключателя 18. С выхода микропереключателя 18 импульсы поступают на вход счетчика 27, ас выхода счетчика 27 сигналы поступают на вход центрального пульта 22 с органами управления для включения аварийной сигнализации Вес не взят и через второй элемент НЕ 24 снимается разрешающий сигнал с первого входа второго элемента И 26 на открытие клинового элеватора 6. Таким образом осуществляется блокировка открытия клинового элеватора 6 при неудержании веса труб 21 клиновым захватом 3. Использование предложенного устройства в автоматизированных буровых установках позволит избежать таких серьезных аварий, как падение бурильной колонны на забой во время спуско-подъемных операций. Формула изобретения 1. Устройство для спуска бурильных труб, содержащее основание буровой установки, неподвижно установленный на основании клиновый захват, первый исполнительный механизм, соединенный с лебедкой талевого блока, второй исполнительный механизм, соединенный с клиновым элеватором, связанным с талевым блоком, и центральный пульт с органами управления, отличающееся тем, что, с целью повышения надежности работы за счет контролирования операции передачи веса бурильных труб от клинового элеватора клиновому захвату, оно снабжено датчиком относительного перемещения клинового элеватора и талевого блока, узлом блокировки и блоком управления передачей веса бурильных труб, при этом узел блокировки установлен на основании буровой установки с возможностью взаимодействия с клиновым элеватором, а блок управления передачей веса бурильных труб содержит, счетчик импульсов, два элемента НЕ, два элемента И и два усилителя,причем выход первого элемента НЕ соединен с первым входом первого элемента И, выход которого соединен с первым усилителем, первый выход счет, чика через второй элемент НЕ соединен с первым входом второго элемента И, выход которого соединен с вторым усилителем, а выход датчика относительного перемещения -клинового элеватора и талевого блока подключен к входу первого элемента НЕ и к второму входу второго элемента И, выход узла блокировки соединен с входом счетчика, второй выход которого соединен с входом центрального пульта с органами управления, первый выход
центрального пульта с органами управления соединен с вторым входом первого элемента И, второй выход центрального пульта с органами управления соединен с третьим входом второго элемента И, выходы усилителей соединены с входами соответствующих исполнительных механизмов. 2. Устройство по п. 1. о т л ичающееся тем, что узел блокировки вьшолнен на микропереключателе щелчкового действия с приводом в виде подпружиненного поворотного зубчатого сектора.
| Устройство для спуска и подъема бурильной колонны | 1981 |
|
SU1027376A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Котляров A.M | |||
| Автоматизация буровых агрегатов | |||
| - М.: Недра, 1971, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
