Известны системы программного управления станками с шаговым двигателем, с применением импульсного датчика обратной связи, реагирующего на направление перемещения исполнительного вала, фазоимпульсные системы цифрового управления, работающие по дифференциальной схеме и фотоэлектрические следящие системы, для копирования по чертежу, в которых генератор подает импульсы на схемы сравнения в противофазе для обеспечения реверсивности привода.
Отличительная особенность описываемой системы программного управления станками с цифровой информацией состоит в том, что, с целью повыщения надежности, структурная схема ее выполнена дифференциальной. Это позволяет устранить влияние на работоспособность системы изменения во времени параметров элементов системь, параметров питающих устройств и иск.лючить из схемы элементы, определяющие направление перемещения (схемы знака, схемы реверса), которые усложняют схему и понижают ее надежность. Для исключения возможности потери информации, в момент одновременного прихода на реверсивный счетчик командного нмлульса и импульса обратной связи, в схему введена внутренняя синхронизация этих импульсов, что позволило отказаться от применения схемы разделет1Я, в результате чего достигнуто у.меньщение рабочей частоты элементов схемы, повыщающее ее надежность. Для останова выходного вала следящей системы при отсутствии командных импульсов в схему введена быстродействующая останавливаюш,ая схема.
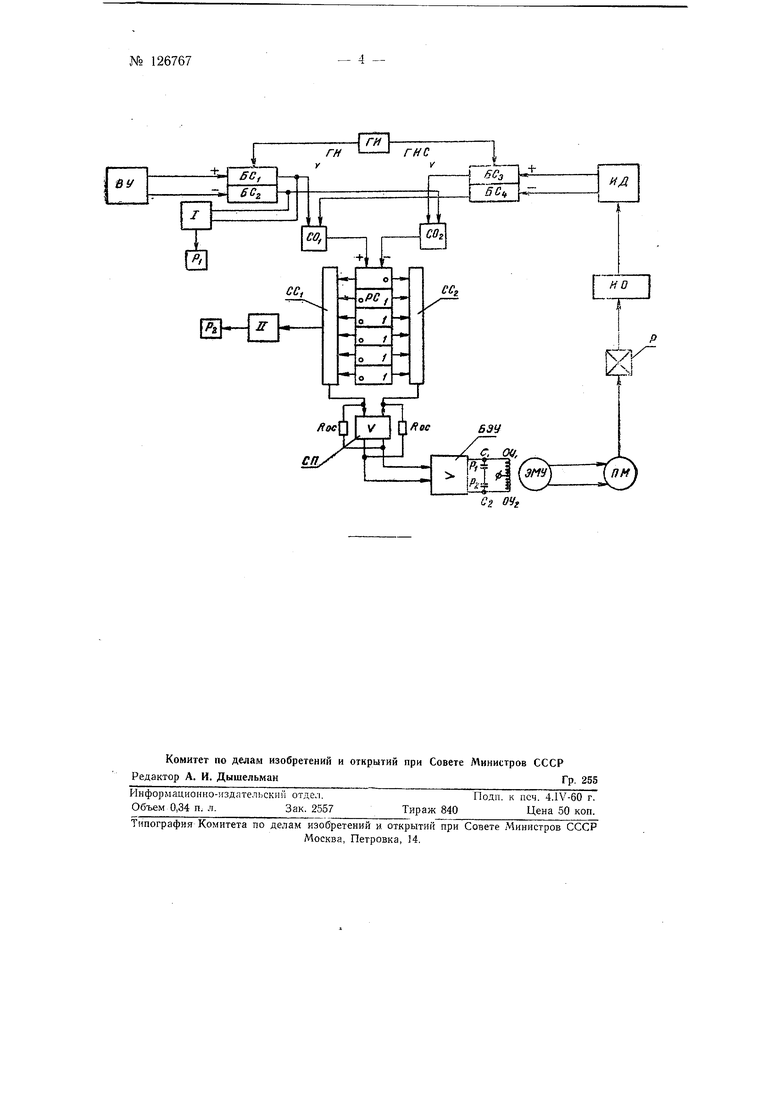
На чертеже изображена структурная схема системы программного управления.
№ 126767,- 2 -
Вводное устройство ВУ системы, включающее в себя электронную схему формирования с двумя выходными каналами: канал положительной информации и канал отрицательной информации; реверсивный импульсный датчик ИД, служащий для последовательного преобразования линейн.ых или вращательных перемещений исполнительпого органа объекта управления в электрические импульсы. Имиульсный датчик обратной связн выполнен реверсивным, т. е. он имеет два выходных канала {+ и -), которые работают в зависимости от направления иеремещения исполнительного органа объекта управления. Схема датчика электронная, импульсная, фазочувствительная. При перемещении иеполнительного органа объекта управления на величину, равную цене одного импульса, схема датчика выдает один электрический импульс но тОМу или нному каналу, з зависимости от направления перемещения. Внутренняя схема синхронизации SCi, БСг, БС,-, БС и схемы объединения COj, COz служат для синхронизации командных импульсов, поступающих с вводного устройства и импульсов обратной связи, поступающих с датчика обратпой связи, и введение их и реверсивный счетчик PC. Схема состоит из генератора импульсов синхронизации ГИ и блоков синхронизации BCi, БС, БС, БC. Генератор импульсов генерирует Идмпульсы синхронизации ГИ и ГЯС, сдвинутые но фазе па 180°, причем импульсы ГИ посылаются на блок синхронизации fiCi и БС, стоящие в цепи вводного устройетьа, а импульсы ГИС - на блоки БСз и BC,i, стоящие в цепи обратпой связи. Блок синхронизации пропускает рабочий импульс только в момент прихода импульса синхронизации. Положительный канал вводного устройства после схемы синхронизации объединяется диодной схемой объединения COi е отрицательным каналом импульсного датчика. Отрицательный канал вводного устройства объединяется схемой объединения. СО с положительнымканалом импульсного датчика.
Реверсивный счетчик PC служащий для сравнения количества командных импульс(з и импульсов обратной связи, выполнен на триггерных ячейках с управляющими вептилънььми устройствами и имеет щесть двоичных разрядов, т. е. его объем равен 63 импульсам. За нулевое состояние реверсивного счетчика принято такое, при котором в его объеме находится 32 импульса, т. е. половина его полного объема. Реверсивный, счетчик имеет два входа: вход сложения и вход вычитания. Импульс, прищедщий по входу сложения, поставит счетчик в состояние, соответствующее 33 импульсам. Импульс, пришедший по входу вычитания, поставит счетчик в состояние, соответствующее 31 импульсу. Со схемы объединения СО импульсы вводятся на вход сложения реверсивного счетчика, а со схемы объединения СОч-на вход вычитания.
Схема преобразования С/7 двоичного кода реверсивного счетчика в постоянное напряжение, пропорциональное по величине количеству находящихся в реверсивном счетчике импульсов, состоит из двух цепочек, суммирующих сопротивление CCi и СС2, вгслюченных на аноды триггеров и суммирующего дифференциальиого усилителя постоянного тока, с большим коэффициентом усиления и глубокой перекрестной отрицательной связью. Величины суммирующих сопротивлений подобраны таким образом, что при состоянии реверсивного счетчика, соответствующего нулевому состоянию системы (т. е. 32 импульсам реверсивного счетчика), напряжение на выходе суммирующего усилителя равно нулю.
При уменьшении числа импульсов иа реверсивном счетчике менее 32, напряжение на выходе суммирующего усилителя будет отридательным и будет изменяться по ступенчатому, линейному закону. Максимальное число ступенек напряжения может быть равно 32. При увеличении числа импульсов в реверсивном счетчике более 32 (до 63), напряжение на выходе суммирующего усилителя будет полон ительным и тоже будет изменяться по ступенчатому линейному закону, причем каждое ступенчатое изменение напряжения определяется наличием нового импульса в реверсивном счетчике. Это напряжение является управляющим.
С суммирующего усилителя управляющее напряжение через балансный электронный усилитель БЭУ управляет обмотками управления электромашинного усилителя ЭМУ, который, в свою очередь, управляет реверсивным приводным мотором постоянного тока.
Испо.лнительный привод следящей системы может быть выполнен по любой схеме.
Исполнительный приводной мотор ПМ через редуктор Р приводит J3 движение исполнительный орган объекта управления ИО, на котором установлен импульсный датчик обратной связи.
В данной системе использованы методы стабилизации, применяемые в обычных непрерывных следящих системах, но в силу своей дискретности в стоянии покоя следящая система оказывается разомкнутой. При наличии люфтов в реальных приводных механизмах и мертвых зон в приводных моторах следящая система начинает колебаться в пределах + 1 иМПульс. Для того чтобы снять эти колебания, не ухудшая одновременно динамических свойств следящей системы, предусмотрена останавливающая схема, состоящая нз двух узлов / и И, которые быстродействующими реле замыкают обмотки управления электромащинного усилителя при отсутствии информации и при нулевом состоянии реверсивного счетчика, тем самым выключая исполнительный привод.
Контакты С| п Cg обоих реле PI и PZ включены последовательно. Реле PI замыкает СБОЙ контакт Ci только в том случае, если частота командных импульсов будет ниже определенной, критической для данной следящей системы частоты. При частоте ниже этой критической частоты следящая система работает как имиульсная, отрабатывая каждый импульс.
При частоте выше этой критической частоты следящая система работает как непрерывная с определенным числом импульсов рассогласования, находящихся в реверсивном счетчике п выражающих динамическую ошибку системы.
Реле PZ замыкает свой контакт Сз при нзлевом состоянии реверсивного счетчика, устройством дешефрирования ну.чя счетчика (32 импульса). Узел / предназначен для устранения возможных колебаний системы в том случае, если динамическая ошибка системы при какойлибо скорости оказывается равной нулю и контакт С разомкнут.
Предмет и з о б о е т е и н я
1.Система программного управления станками с цифровой информацией, отличающаяся тем, что, с целью повышения помехоустойчивости и надежности управления, схема выполнена дифференциальной с Применением внутренней синхронизации, исключающей возможность потери информации.
2.Система но п. 1, отличающаяся тем, что, с целью гашения колебаний при отсутствии информации, применена релейная останавливающая схема.
№ 126767

| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления станками с цифровой информацией | 1960 |
|
SU145118A1 |
| Импульсная система цифрового программного управления | 1961 |
|
SU145119A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU368418A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2004 |
|
RU2255341C1 |
| ИМПУЛЬСНО-ФАЗОВАЯ СИСТЕЛ\А ПРОГРАММНОГОУПРАВЛЕНИЯ | 1972 |
|
SU423102A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Устройство для возбуждения сейсмических колебаний | 1986 |
|
SU1383244A1 |