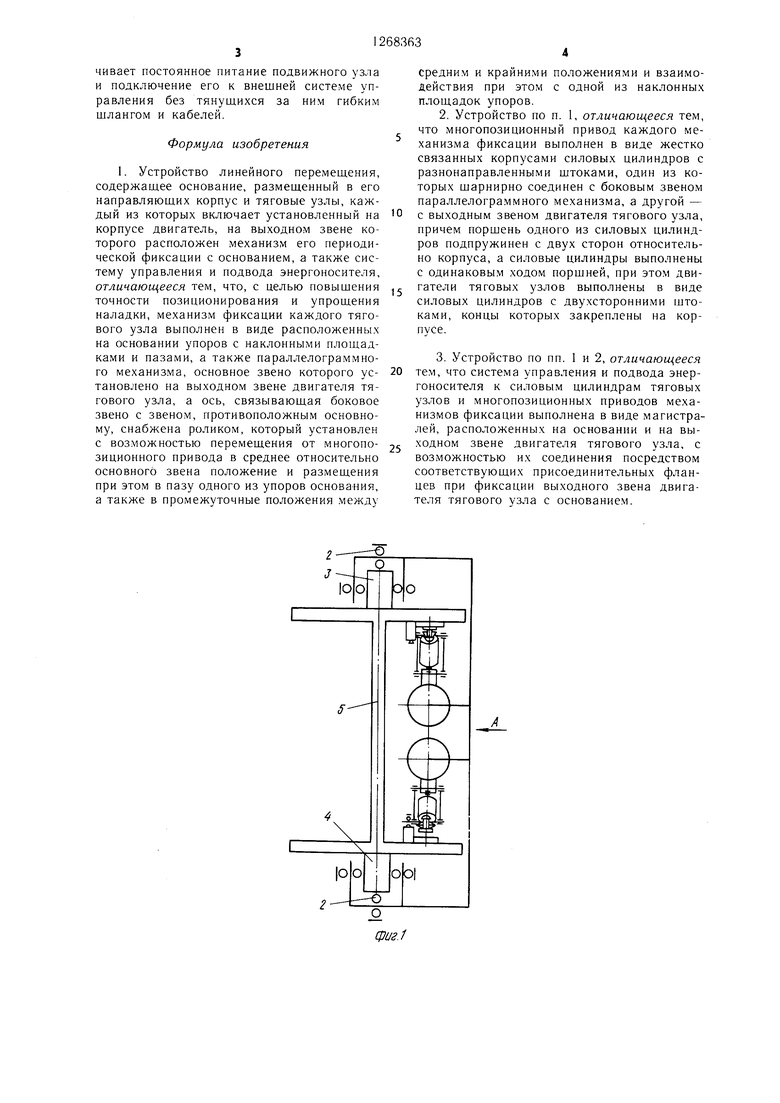
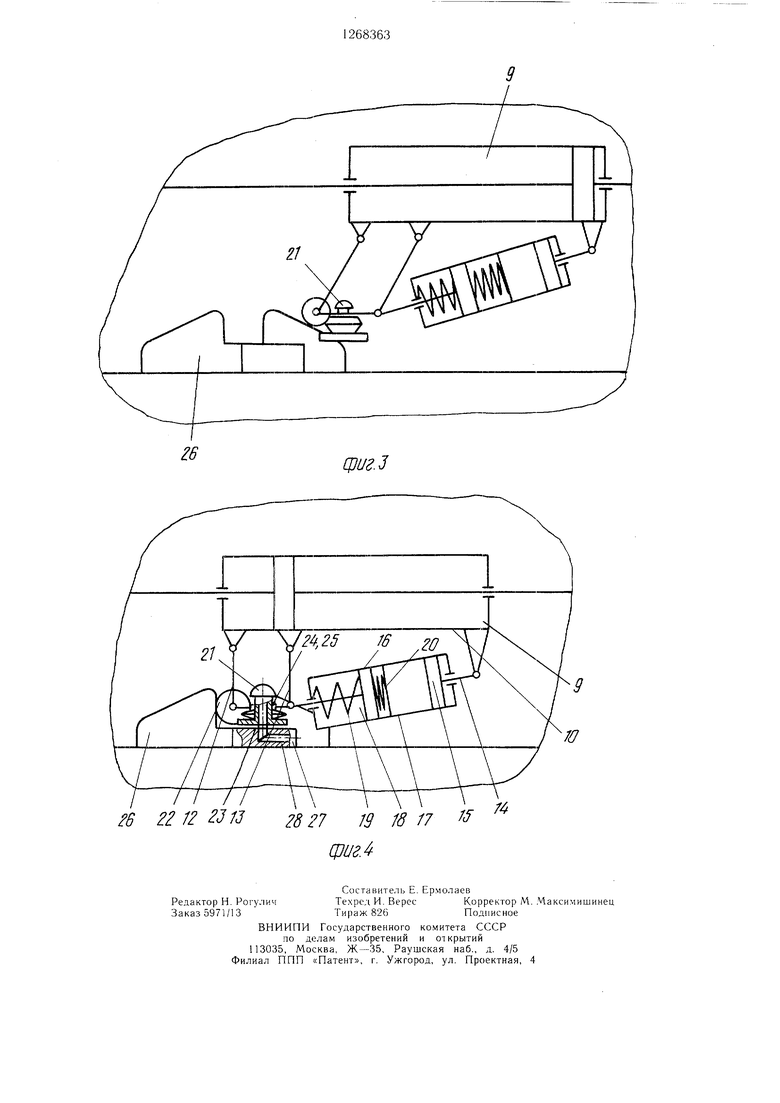
Изобретение относится к машиностроению, а именно к манипулирующим устройствам, предназначенным для обслуживания нескольких позиций технологического оборудования, расположенных на больших расстояниях. Цель изобретения - повышение точности позиционирования и упрош.ение наладки за счет обеспечения поэтапного позиционирования и подвода энергоносителя к приводам на каждой позиции. На фиг. 1 изображена кинематическая схема устройства линейного перемещения; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - положение элементов устройства в промежуточном между позициями положении корпуса; на фиг. 4 - положение элементов устройства в момент фиксации на позиции. Устройство линейного перемещения содержит корпус 1 на роликах 2, перемещающий по направляющим 3 и 4, установленным на неподвижном основании 5. С корпусом 1 жестко связаны шток-поршни 6 и 7 силовых пневмоцилиндров 8 и 9, корпуса 10 и 11 которых представляют собой выходные звенья двигателей тяговых узлов корпуса 1. К корпусу пневмоцилиндров 8 и 9 шарнирно крепятся звенья 12 и 13 механизма периодической фиксации выходного звена с основанием, выполненного в виде параллелограммного механизма, шток-поршень 14 цилиндра 15 привода механизма фиксации, Цилиндры 15 и 16 объединены общим корпусом 17 в единый блок, шток-порщень 18 цилиндра 16 выводится в среднее положение пружинами 19 и 20. Звено 13 шарнирно соединено с шток-поршнем 18 и звеном 21 параллелограммного механизма. Звено 21 шарнирно соединено с звеном 12, образуя параллелограммный механизм из звеньев 12, 13 и 21. На оси сочленения звеньев 12 и 21 расположен ролик 22. На звене 21 подвижно крепится устройство приема рабочего тела, выполненное в виде фланца 23, поджатого тарельчатыми пружинами 24 и 25. На упоре 26, прикрепленном к основанию 5, имеется устройство подвода рабочего тела 27 с каналом 28 для подвода энергоносителя. Аналогичное устройство фиксации крепится к корпусу 11 пневмоцилиндра 9. Поэтапная работа устройства осушествляется следующим образом. На первом этапе механизм фиксации цилиндра 9 фиксируется на упоре при среднем положении параллелограммного механизма фиксации с роликом, фланец цилиндра 8 запитывается магистральным давлением, механизм фиксации цилиндра 8 расфиксируется, т.е. полости цилиндров 15 и 16 соединяются с атмосферой, далее магистральное давление снимается с фланца цилиндра 8. На втором этапе подается давление в правую полость цилиндра 9 и его щток-порщень 7, а с ни.м и корпус 1 начинают двигаться влево, подается давление в левую полость цилиндра 8 и он начинает ускоренно двигаться влево. На третьем этапе в результате движения влево цилиндра 8 ролик 22 выходит из фиксирующего паза упора и сходит с упора, после этого подается давление в левую полость цилиндра 15 и .механизм фиксации занимает левое промежуточное положение. На четвертом этапе в результате движения влево цилиндра 8 ролик 22 находит на следующий упор 25 и начинает двигаться вверх по заходной части упора, сжимая пружину 19. На пятом этапе ролик 22 попадает в фиксирующий паз упора 26 и начинает опускаться, сжимая пружину 20 и опуская фланец 23, сжимая тем самым тарельчатые пружины 24 и 25. На шестом этапе звено 12 принимает вертикальное положение, в левую полость цилиндра 16 подается давление, те.м самым звено 12 фиксируется в среднем положении, затем в устройство подвода рабочего тела 27 подается магистральное давление, происходит расфиксация корпуса цилиндра 9 и снимается магистральное давление с фланца подпитки цилиндра 9. На седьмом этапе подается давление в правую полость цилиндра 8, в результате чего корпус 1 продолжает движение влево, подается давление в левую полость цилиндра 9 и он начинает быстро двигаться влево. Таким образом, завершается один шаг устройства линейного перемещения. Далее описанный шаг делает цилиндр 9 и т.д. При необходимости остановки на седьмом этапе не подается давление в правую полость цилиндра 8 и в левую полость цилиндра 9. При этом механизм останавливается на упоре 26, фиксируясь относительно него. В случае необходимости движения в обратную сторону на седьмом этапе подается давление в левую полость цилиндра 8 и правую полость цилиндра 9, .механиз.м фиксации корпуса цилиндра 8 расфиксируется с основанием, а механизм фиксации корпуса цилиндра 9 фиксируется и цилиндр 8 делает шаг в правую сторону и т.д. Таким образом, возможно непрерывное движение корпуса 1 в любом направлении и его остановка на упоре. Так как поиск упора ролик осуществляет автоматически, местоположение упора лишь ограничивается щагом механизма и может регулироваться в пределах этого шага в зависимости от позиции, на которую настраивается механизм. Кроме того, постоянный контакт одного из устройства приема рабочего тела с устройством подвода рабочего тела обеспечивает постоянное питание подвижного узла и подключение его к внешней системе управления без тянущихся за ним гибким шлангом и кабелей. Формула изобретения 1. Устройство линейного перемещения, содержащее основание, размещенный в его направляющих корпус и тяговые узлы, каждый из которых включает установленный на корпусе двигатель, на выходном звене которого расположен механизм его периодической фиксации с основанием, а также систему управления и подвода энергоносителя, отличающееся тем, что, с целью повыщенин точности позиционирования и упрощения наладки, механизм фиксации каждого тягового узла выполнен в виде расположенных на основании упоров с наклонными площадками и пазами, а также параллелограммного механизма, основное звено которого установлено на выходном звене двигателя тягового узла, а ось, связывающая боковое звено с звеном, противоположным основному, снабжена роликом, который установлен с возможностью перемещения от многопозиционного привода в среднее относительно основного звена положение и размещения при этом в пазу одного из упоров основания, а также в промежуточные положения между средним и крайними положениями и взаимодействия при этом с одной из наклонных площадок упоров. 2.Устройство по п. 1, отличающееся тем, что многопозиционный привод каждого механизма фиксации выполнен в виде жестко связанных корпусами силовых цилиндров с разнонаправленными штоками, один из которых шарнирно соединен с боковым звеном параллелограммного механизма, а другой - с выходным звеном двигателя тягового узла, причем поршень одного из силовых цилиндров подпружинен с двух сторон относительно корпуса, а силовые цилиндры выполнены с одинаковым ходом поршней, при этом двигатели тяговых узлов выполнены в виде силовых цилиндров с двухсторонними щтоками, концы которых закреплены на корпусе. 3.Устройство по пп. 1 и 2, отличающееся тем, что система управления и подвода энергоносителя к силовым цилиндрам тяговых узлов и многопозиционных приводов механизмов фиксации выполнена в виде магистралей, расположенных на основании и на выходном звене двигателя тягового узла, с возможностью их соединения посредством соответствующих присоединительных фланцев при фиксации выходного звена двигателя тягового узла с основанием.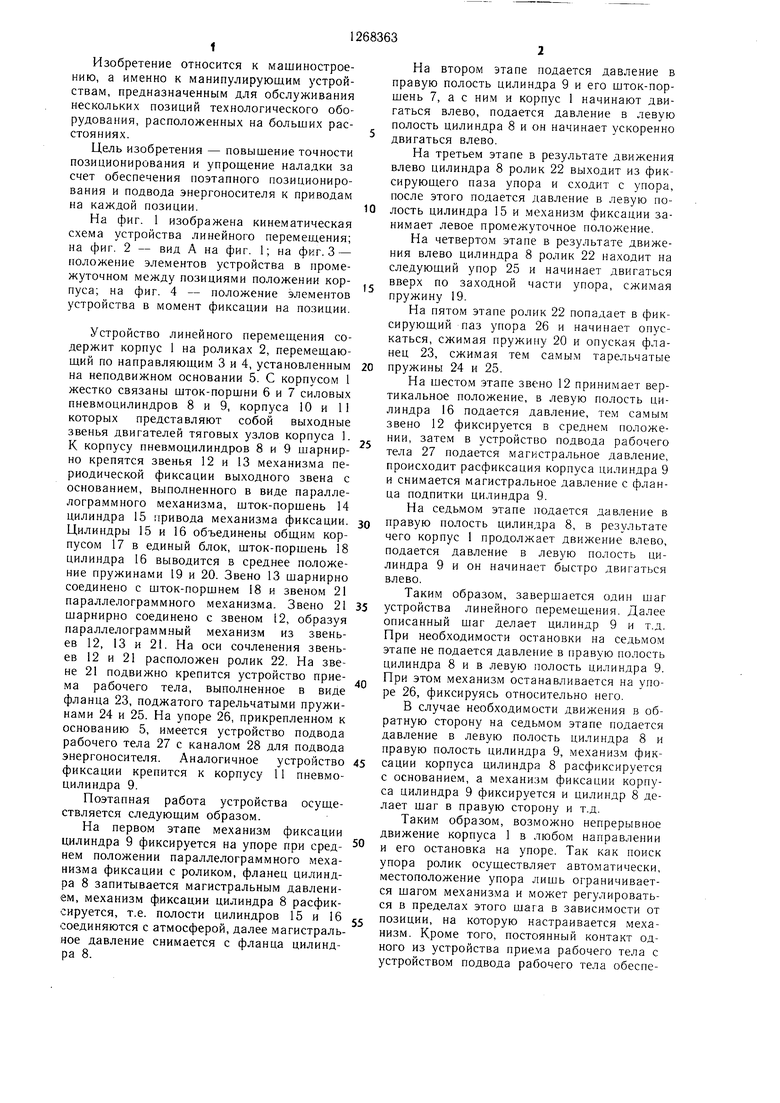
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикально-замкнутый конвейер пульсирующего типа | 1983 |
|
SU1137027A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| Устройство для поворота и фиксирования деталей типа зубчатых колес | 1984 |
|
SU1331621A1 |
| ДВУХРЕЛЬСОВЫЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2003 |
|
RU2258622C2 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 1992 |
|
RU2068360C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| СТЕНД МАГНИТОПОРОШКОВОГО КОНТРОЛЯ ЗУБЧАТЫХ КОЛЕС | 2015 |
|
RU2601295C1 |
| ГОРИЗОНТАЛЬНЫЙ МОЛОТ | 1992 |
|
RU2048947C1 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 1997 |
|
RU2137641C1 |
Изобретение относится к машиностроению, а именно к манипулирующим устройствам, предназначенным для обслуживания нескольких позиций технологического оборудования. Цель изобретения - повышение точности позиционирования, и упрощение наладки. Это достигается применением в устройстве линейного перемещения с корпусом 1 и двигателем механизма периодической его фиксации на основании, включающего упоры, которые расположены на неподвижном основании и имеют наклонные площадки и пазы. В качестве привода использован блок из двух пневмоцилиндров 8 и 9. Для устранения гибких щлангов, тянущихся за механизмом, устройство приема рабочего тела смонтировано посредством параллелограмного механизма на каждом приводе перемещения корпуса I. 2 з.п. ф-лы, 4 ил.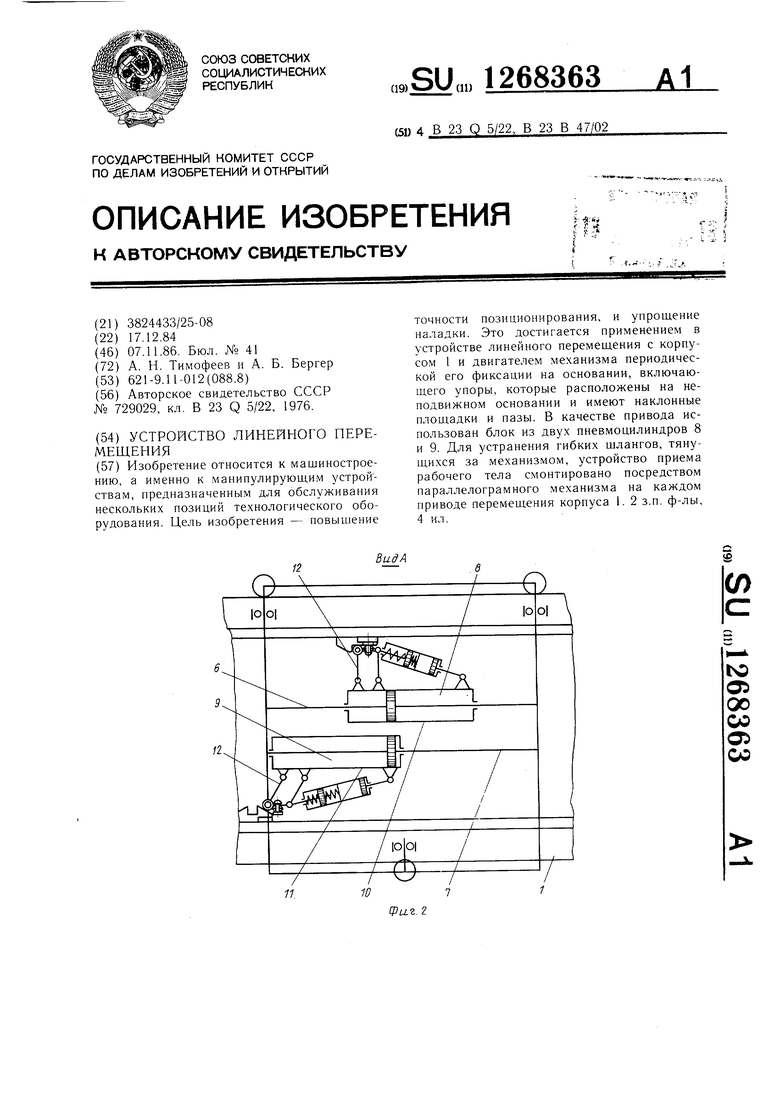
| Устройство для перемещения подвижного узла | 1976 |
|
SU729029A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
