общена с напорной ГЛ 1, а другая с соотв. рабочей полостью. Изменение рабочего объема исполнительного механизма происходит автоматически в зависимости от нагрузки на штоке 8 путем изменения гидравлической проводимости одного из ПД. Это снижает затраты гидравлической энергии. Jlepeход на рекуперативный режим работы
68830 .
происходит в момент соответствия обобщенных гидравлических х-к при давлении в сливных рабочих полостях, равных давлению нагнетания.Т..о. без уменьшения энергетической эффективности исключаются рывки штока гидроусилителя при переходе с рекуперативного режима на обычный, и наоборот. 1 з.п. ф-лы, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания рулевого управления транспортного средства | 1984 |
|
SU1163188A1 |
| Самоподнастраивающийся линейный шаговый электрогидравлический привод | 1975 |
|
SU735832A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1987 |
|
SU1726674A1 |
| Землеройно-транспортная машина | 1988 |
|
SU1640294A1 |
| Гидропривод фронтально-перекидного погрузчика | 1982 |
|
SU1060561A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1982 |
|
SU1044783A1 |
| Способ управления рабочим органом землеройно-транспортной машины и гидропривод для его осуществления | 1986 |
|
SU1392214A1 |
| Активная подвеска сиденья транспортного средства | 1984 |
|
SU1164096A1 |
| Устройство для управления машиной с режущим рабочим органом | 1976 |
|
SU652280A1 |
| Рыхлитель | 1989 |
|
SU1666659A1 |
Изобретение может быть использовано в машинах, рабочие органы к-рых работают в условиях знакопеременных нагрузок. Изобретение позволяет улучшить динамические хар-ки привода. Гидрораспределитель вьшолнен в виде золотника 11, установленного в гильзе 12 с образованием переменных дросселей (ПД) 13-20. ПД 13, 15, 17, 19 связаны с напорной гидролинией (ГЛ) 1 и вьшолнены с большей гидравлической проводимостью, чем ПД 14, 16, 18, 20, связанные со сливной ГЛ 2. В ГЛ связи рабочих полостей с дросселирующими распределителями установлены переключающие дросселирующие распределители 21 - 24 с двумя линиями управления, одна из к-рых соto о: 00 00 со
Г
Изобретение относится к машиностроительной гидравлике и может найти применение в системах с гидравлическим приводом,.рабочие органы которых работают в условиях знакопеременных нагрузок.
Цель изобретения - улучшение динамических характеристик привода.
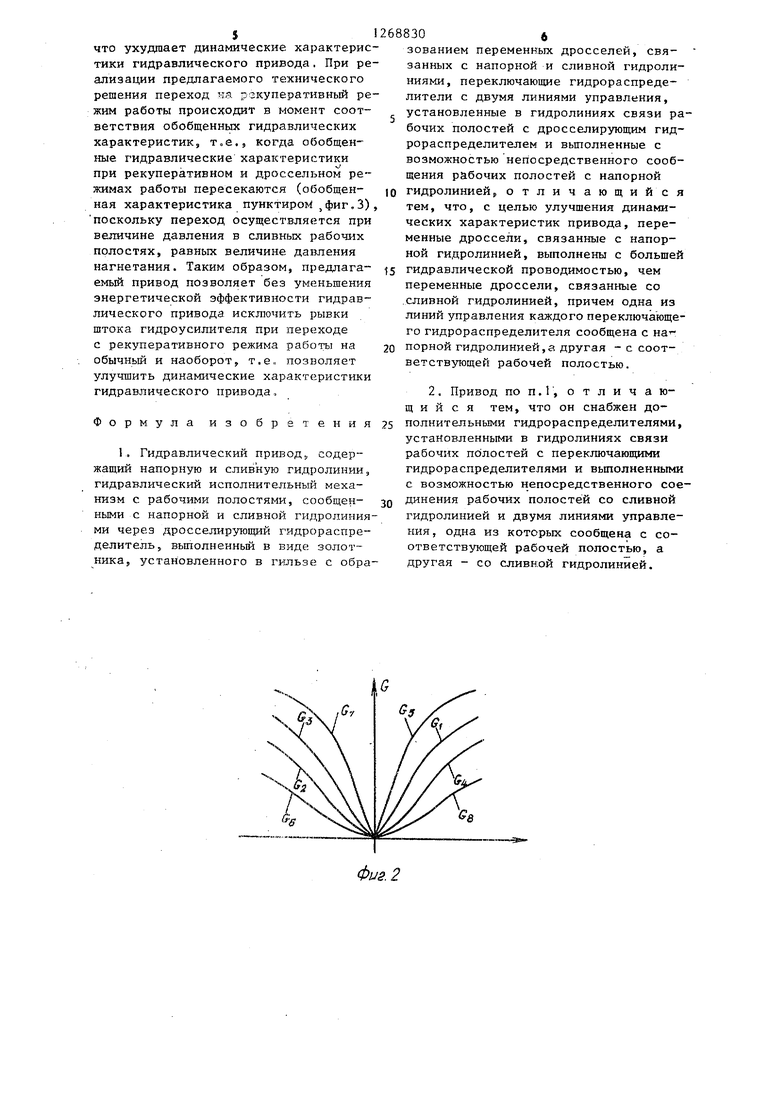
На фиг.I представлена принципиальная схема гидравлического привода; на фиг.2 - зависимости гидравлических проводимостей переменных дросселей от величины смещения х .зо лотника относительно гильзы; ни фиг.З - обобщенная гидравлическая характеристика привода (зависимость скорости V от нагрузки R).
Гидравлический привод содержит напорную 1 и сливную 2 гидролинии, гидравлический исполнительный механизм
3с рабочими полостями 4-7, штоком 8 и поршнями 9 и 10, дросселирующий гидрораспределитель, выполненный в виде золотника 11, установленного в гильзе 12 с образованием переменных дросселей 3-20 с соответствующими гидравлическими проводимостям ц G; -Gg Дроссели 13, 15, 17 и 19 связаны с напорной гидролинией 1, а дроссели 14, 16, 8 и 20 - со сливной гидролинией 2. Кроме того, привод содержит переключающие гидрораспределители 21 - 24, каждый из которых выполнен с двумя линиями 25 и 26, 27
и 28, 29 и 30, 31 и 32 соответственно управления, установленными в гидролиниях 33 - 36 рабочих полостей
4- 7 с дросселирующим, гидрораспределителем и выполненными с возможностью непосредственного сообщения рабочих полостей 4 - 7 с напорной гидролинией 1.
Для обеспечения предпочтительно-го положения гидрораспределителей 21 - 24 они должны быть подпружи- . нены со стороны линий 26, 28, 30 и 32. В этом случае пружины (не обозначены) выбираются достаточно малой Ясесткости и с мальгм усилием предварительного сжатия (для преодоления сил трения) и гидравлический исполнительный механизм 3 всегда (даже при отсутствия давления в напорной гидролинии 1) готов к работе. Вьтолнение гидрораспределителей 21-24 дросселирующими и подключение линий 25, 27, 29 и 31 управления к рабочим полостям 4-7 соответственно через гидравлическое сопротивление (не обозначено) позволяет осуществить плавное подключение рабочих полостей 4 - 7 к напорной линии 1 присрабатывании гидрораспределителей 21-24 и исключать забросы расхода рабочей жидкости, которые могут возникать при . Как известно, гидравлическая проводимость определяется следующим образом;
G, (x)| ,
где ,/ - коэффициент расхода;
f(х) - площадь переменного дросселя;
J- плотность жидкости. Таким образом, задавая соответст- вующим образом зависимость f(x), 35 выбирают соответствующим образом начения гидравлических проводимостей GI -Gg, например, выбирая ширину щели дросселей 13-20, так как в этом случае 40f(x) Ьх ,
где b - ширина щели, соответствующего дросселя 13-18;
X - смещение золотника I1 относительно гильзы 12.
Привод снабжен дополнительными гидрораспределителями 37-40 и гидроаккумуляторами 41 и 42. Гидрораспределители 37-40 установлены в гидролиниях 43-46 связи рабочих полостей 4-7 с переключающими гидрораспределителями 21-24 и выполнены с возможностью непосредственного соединения рабочих полостей 4-7 со сливной гидролинией 2 и двумя линиями 47 и -48 управления (гидрораспределители 38-40 показаны условно).
Гидравлический привод работает следуюпщм образом.
Пусть Сн7 С„ Села Если величина приведенной препятствующей нагрузки, действующей на шток 8
. I (С„л +G, +С,;„ ))Р„,
то при смещении золотника 11 относительно гильзы 12 давление рабочей жидкости в сливных полостях 4 и 6 или 5 и 7 меньше величины Давления нагнетания Р„ (для упрощения полагаем Р,, Р„г Р, и ,, Рсг РС ) и гидрораспределители 21-24 занимают положение, изображенное на фиг.1, где 0(4,2 - проводимость переменного дросселя 18 или 20; GCAI - проводимость переменного дросселя 14 или 16 GH, - проводимость переменного дросселя 13 или 15; С„р - проводимость переменного дросселя 17 или 19; F площадь (эффективная) поршня 9 или 10.
В этом случае гидравлический привод работает в обычном режиме дроссельного привода, т.е. при смещении золотника И, например, вправо (по чертежу) рабочая жидкость из гидролинии 1 и нагнетания поступает в рабочие полости 4 и 6 через переменные дроссели 13 и 17 с проводимостями GJ и Gj, а из полостей 5 и 7 сливается в гидролинию 2 через дроссели 16 и 20 с проводимостями G и G.
Если величина препятствующей нагрузки
|-(ьс,,, (С- G, +G;, ))р,,
а величинапомогающей нагрузки
§.-G
. G-2, ) Р„, то величина давления в сливной полости 6 или 7 больше величины давления в напорной гидролинии 1. Например, при смещении золотника 11 впра68830 4
во давление в полости 7 больше величины давления Р, в гидролинии 1 , тогда срабатывает гидрораспределитель 24 и рабочая полость 7 сообщается с напорной гидролинией I с давлением Р„, . В этом случае полости 6 и 7 за с
кольцованы и образуют пассивное гидравлическое сопротивление, увеличивающее коэффициент относительного демп)0 фирования привода.
Если величина помогающей нагрузки находится в диапазоне
) 1 GI,(G: +G,)P«.
то, например, при смещении золотника 15 , , «
11 вправо величины давлений в полостях 5 и 7 больше величины давления в напорной гидролинии 1, срабатывает гидрораспределитель 22 и рабочая жидкость из сливных полостей 5 и 7 через гидрораспределители 22 и 24 поступает в напорную гидролинию 1. Тем самым происходит кольцевание рабочих полостей 4-7 механизма 3.
Управление скоростью перемещения штока 8 осуществляется изменением гидравлических проводимостей GHI и
GHJ . ,
Если величина помогающей нагрузки
|. р„ (1, G;,),
то, например, при смещении золотника
11 вправо при уменьшении величины давления в полости 4 меньше давления в сливной гидролинии 2 срабатывает
гидрораспределитель 37 и полость 4 соединяется со сливной гидролинией
2и разъединяется от напорной гидролинии 1 .
В этом случае управление скоростью перемещения штока осуществляется изменением гидравлической проводимости С„2 (5) Таким образом, в зависимости от величины нагрузки на штоке 8 автоматически происходит изменение рабочего объема гидравлического исполнительного механизма 3, что позволяет снизить затраты гидравлической энергии от источника питания.
При выполнении величины зоны нечувствительности системы рекуперации по нагрузке, равной лр,„ (величина
R приведенной нагрузки - , при которой
происходит включение гидрораспределителей 21-24), для известного привода следует рывок штока, например, при величине смещения х золотника I1 от- .носительно гильзы 12 на величину лУ, S что ухудгаает динамические характерис тики гидравлического привода. При ре ализации предлагаемого технического решения переход на рекуперативный ре жим работы происходит в момент соответствия обобщенных гидравлических характеристик, т.е. когда о(5общенные гидравлические характеристики при рекуперативном и дроссельном режимах работы пересекаются Со(5общенная характеристика пунктиром фиг,3) поскольку переход осуществляется при величине давления в сливных рабочих полостях, равных величине давления нагнетания. Таким образом, предлагаемьй привод позволяет без уменьшения энергетической эффективности гидравлического привода исключить рывки штока гидроусилителя при переходе с рекуперативного режима работы на обычный и наоборот, т.е„ позволяет улучшить динамические характеристики гидравлического привода,, Формула изобретения 1. Гидравлический привод,, содержащий напорную и сливнуьэ гидролинии, гидравлический исполнительный механизм с рабочими полостями, сообщенными с напорной и сливной гидролиния ми через дросселирующий гидрораспределитель, выполненньй в виде золотника, установленного в гильзе с обра
,,
Фиё.2 306 зованием переменных дросселей, связанных с напорной и сливной гидролиниями, переключающие гидрораспределители с двумя линиями управления, установленные в гидролиниях связи рабочих полостей с дросселирующим гидрораспределителем и вьтолненные с возможностью непосредственного сообщения рабочих полостей с напорной гидролиниейр отличающийся тем, что, с целью улучшения динамических характеристик привода, переменные дроссели, связанные с напорной гидролинией, выполнены с большей гидравлической проводимостью, чем переменные дроссели, связанные со .сливной гидролинией, причем одна из линий управления каждого переключающего гидрораспределителя сообщена с напорной гидролинией,а другая - с соответствующей рабочей полостью. 2. Привод по п.1, о т л и ч а ющ и и с я тем, что он снабжен дополнительнь ми гидрораспределителями, установленными в гидролиниях связи рабочих полостей с переключающими гидрораспределителями и выполненными с возможностью непосредственного соединения рабочих полостей со сливной гидролинией и двумя линиями управления, одна из которых сообщена с соответствующей рабочей полостью, а другая - со сливной гидролинйей.
Ц)иг.З
| Гидроусилитель | 1981 |
|
SU1048187A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
