to
а
СХ)
со ел
Изобрел-ение относится к геодезическим измерениям, в частности к фотограмметрическим методам определения пространственного положения объектов, и может быть использовано для определения положения подвижных объектов относительно выбранной плоской системы координат.
Целью изобретения является з еньгаение стоимости и увеличение производительности работ за счет обеспечения возможности использования малоэффективных фотокамер с неизвестным фокусным расстоянием и сокращения затрат времени на фотограмметрическую обработку фотоснишсов,
Для достижения указанной цели на подвижном объекте устанавливают фотокамеру. При этом может быть использована обычная любительская малоформатная фотокамера, фокусное. расстояние которой, как правило,точно неизвестно. На местности разбивают полигон в виде прямоугольного треугольника, в вершинах которого располагают вехи, форма и размер которых обеспечивали бы возможность опознавания их на фотоизображениях. Полигон фотографируют камерой, установленной на объекте.
Кроме того, полигон фотографируют дополнительно той же камерой из точки, расположенной на продолжении одного из пакетов треугольника на расстоянии, величину которого измеряют.
Полученные снимки увеличивают. Это. необходимо для того, чтобы получить возможность измерений их с помощью простых устройств, например линейки. При этом увеличение всех снимков должно быть одинаковым, так как одинаковыми должны быть их фо. кусные расстояния.
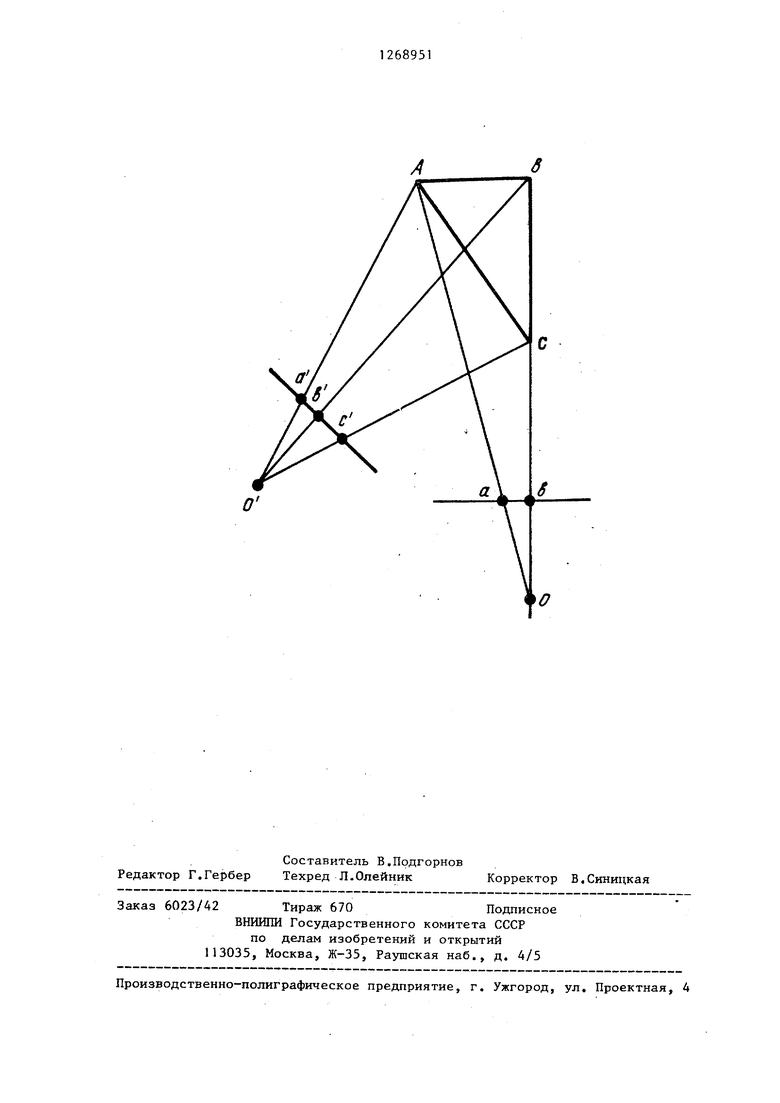
По увеличенному изображению дополнительного снимка с помощью графических построений находят его фокусное расстояние. Для этого в избранной системе координат и в нужном масштабе строят прямоугольный треугольник л ABC (см. чертеж), соответствующий сфотографированному,
2689512
и точку получения дополнительного снимка -t . Через последнюю проводят перпендикуляр к продолжению катета треугольника. На увеличенном изоб5 ражении дополнительного снимка измеряют длину ортогональной проекции на горизонтальную его сторону расстояния между сфотографированными вехами и откладывают ее на чертеже 10 О-Ь . Через точки А и о. проводят прямую до пересечения с продолжением катета прямоугольного треугольника 0. Отрезок 0 и есть искомое фокусное расстояние. Используя его величи15 ну, методом, известным из фотограмметра, на том же чертеже графически решают обратную фотограмметрическую засечку и последовательно определяют положение всех центров фотографиро20 вания т О .
Формулаиз обретения
Способ определения положения под25 вижного объекта, заключающийся в том, что на местности устанавливают и определяют взаимное положение не менее чем трех визирных целей, получают их фотоснимки камерой, установ2Q ленной на объекте и проводят фотограмметрическую обработку снимков путем графического решения обратной фотограмметрической засечки, о т личающийся тем, что, с целью сокращения стоимости и увеличения производительности работ за счет использования малоформатных камер с произвольным фокусным расстоянием и сокращения затрат времени на фотограмметрическую обработку снимков, перед решением обратной фотограмметрической засечки визирные щели располагают в вершинах прямоугольного треугольника, и получают их допол- нительный снимок той же камерой из точки, выбранной на продолжении одного из катетов треугольника, измеряют расстояние от этой точки до ближайшей вершины треугольника, одинаково увеличивают все снимки и по дополнительному снимку графически определяют фокусное расстояние всех снимков.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОЙ КАЛИБРОВКИ ФОТОКАМЕР | 2006 |
|
RU2308001C1 |
| Способ определения пространственных координат точек местности | 1985 |
|
SU1278580A1 |
| Способ определения положения полевых опознаков | 1980 |
|
SU984281A1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ТОЧЕК ОБЪЕКТА | 2000 |
|
RU2173445C1 |
| Способ маркирования полевых опознаков | 1977 |
|
SU701216A1 |
| Способ наземной фотограмметрической съемки | 1977 |
|
SU777425A1 |
| Способ фототеодолитной крупномасштабной съемки подземных выработок | 1977 |
|
SU673845A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА ИСПЫТАНИЙ В ВИДЕ ТЕЛА ВРАЩЕНИЯ С ИЗВЕСТНЫМИ ГЕОМЕТРИЧЕСКИМИ ПАРАМЕТРАМИ | 2013 |
|
RU2536096C1 |
| Способ определения систематических ошибок снимка | 1982 |
|
SU1064132A1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ МЕТАЕМОГО ОБЪЕКТА | 2011 |
|
RU2470311C1 |
Изобретение относится к геодезическим измерениям и позволяет сократить стоимость и увеличить производительность работ за счет использования малоформатных камер с произвольным фокусным расстоянием и сокращения затрат времени на фотограмметрическую обработку снимков. В вергаинах прямоугольного треугольника на местности размещают вехи, форма и размер которых обеспечивает опознавание их на фотоизображени- . ях, и фотографируют полигон камерой, установленной на объекте, и на продолжении одного из катетов треугольника полученные снимки одинаково увеличивают. По увеличенному изобс S ражению дополнительного снимка определяют фокусное расстояние всех (Л снимков. 1 ил.
| Бобор Н.Я | |||
| и др | |||
| Фотограммет- | |||
| рия | |||
| - М.: Недра, 1974, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Говорухин A.M | |||
| и др | |||
| Справочник офицера по военной топографии | |||
| М.: Изд-во МО СССР, 1968, с | |||
| Приспособление для градации давления в воздухопроводе воздушных тормозов | 1921 |
|
SU193A1 |
