сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1983 |
|
SU1079429A1 |
| Стыковочное устройство робота | 1989 |
|
SU1627403A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
Изобретение относится к машиностроению, в частности к роботам и манипуляторам, используемым для автоматизации различных процессов. Целью изобретения является расширение технологических возможностей за счет увеличения рабочей зоны, обеспечения возможности перехвата объекта манипулирования и обеспечения работоспособности в широком диапазоне температур, работы в газовой и водной среде высокого давления, вакууме, а также снижение потребления энергии за счет повышения КПД. Перемещение рук, установленных на дополнительной платформе, возможно одновременно при продольном перемещении второй дополнительной платформы за счет вращения гаек, установленных в корпусах и расположенных на винтах или перемещении дополнительной платформы посредством приводов линейного перемещения. Относительное перемещение рук возможно при работе приводов линейного перемещения, связывающих соседние платформы этих рук. Все передачи приводов рук и их схватов осуществляют передачу усилия посредством магнитного поля. 6 ил.
Изобретение относится к машиностроению, в частности к роботам и манипуляторам, используемым для автоматизации различных процессов.
Целью изобретения является расширение технологических возможностей за счет увеличения рабочей зоны, обеспечения возможности перехвата объекта манипулирования и обеспечения работоспособности в широком диапазоне температур, а также снижение потребления энергии за счет повышения к.п.д.
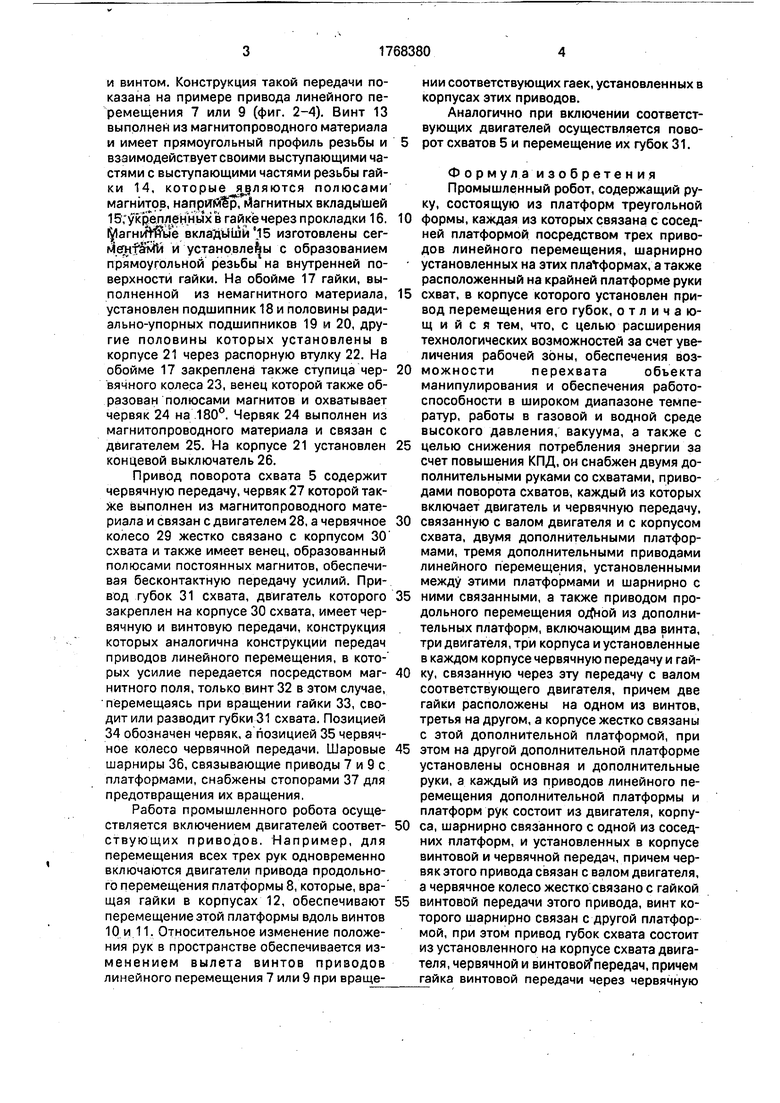
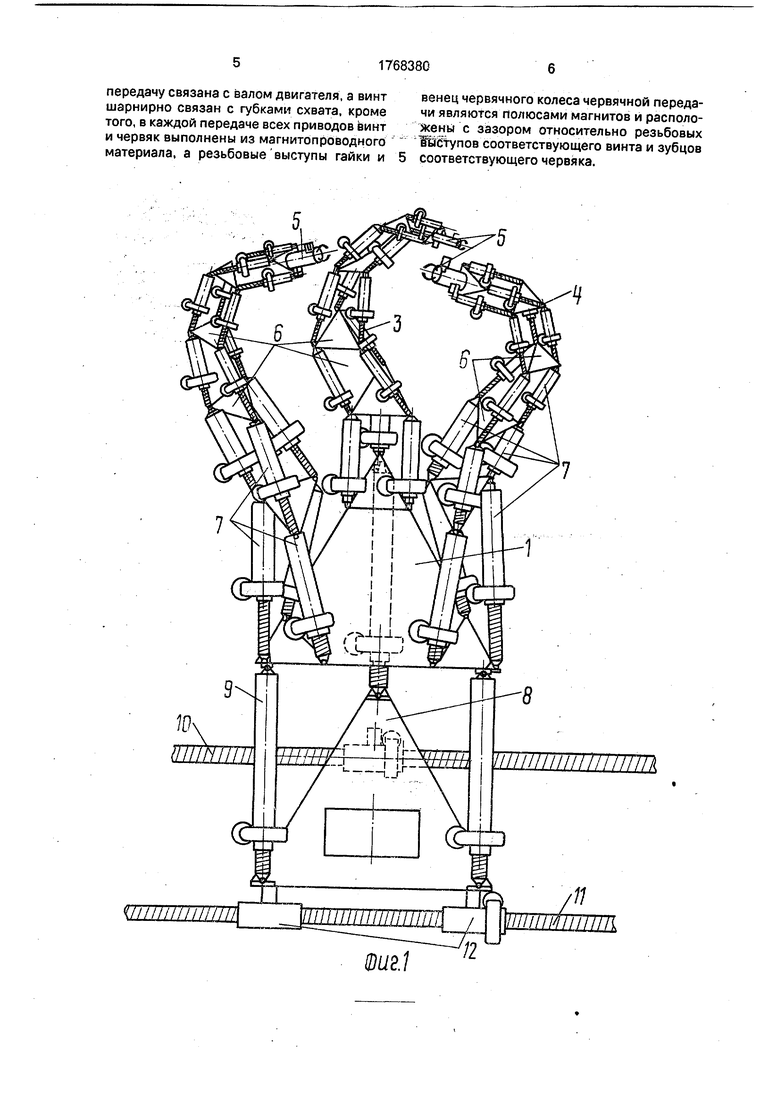
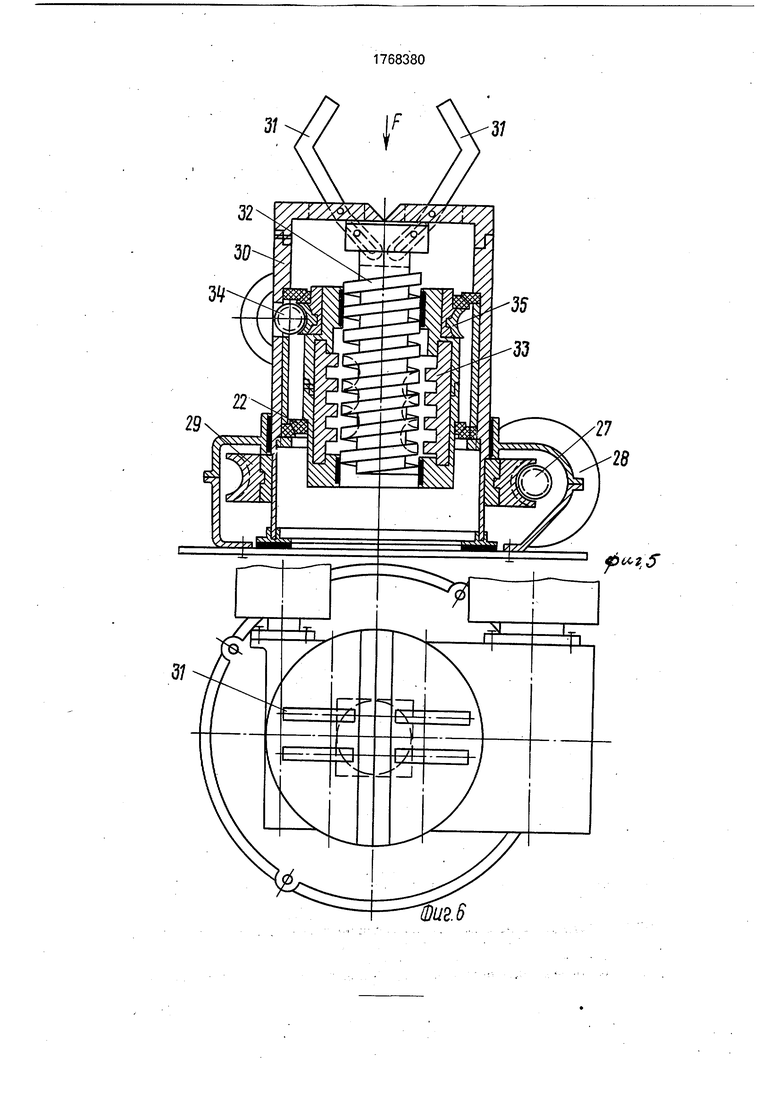
На фиг. 1 изображен общий вид промышленного робота; на фиг. 2 - привод линейного перемещения, разрез; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез ВСДЕ на фиг. 2; на фиг. 5 - привод схвата, разрез; на фиг. 6 - вид по стрелке F на фиг. 5.
Промышленный робот содержит установленные на дополнительной платформе 1 основную 2 и две дополнительных руки 3 и 4 со схватами 5, каждая из которых состоит из платформы 6, связанных между собой посредством приводов линейного перемещения 7. Другая дополнительная платформа 8 связана с платформой 1 через дополнительные приводы линейного перемещения 9 и снабжена приводом ее продольного перемещения, включающим два винта 10 и 11, на которых в корпусах 12 установлены гайки, связанные через червячную передачу с валом соответствующего двигателя, закрепленного на корпусе. В передачах этого привода как и остальных приводов передача усилия осуществляется за счет магнитного взаимодействия между червяком и червячным колесом и между гайкой
Х|
О 00
со
00 О
и винтом. Конструкция такой передачи показана на примере привода линейного перемещения 7 или 9 (фиг. 2-4). Винт 13 выполнен из магнитопроводного материала и имеет прямоугольный профиль резьбы и взаимодействует своими выступающими частями с выступающими частями резьбы гайки 14, которые являются полюсами магнитов, HanptTtfJtfT, Магнитных вкладышей 15,укрепленных в гайке через прокладки 16. fyarHHilBbie вкладъНий ЗБ изготовлены сег- Мегндсгм1/1 и установлены с образованием прямоугольной резьбы на внутренней поверхности гайки. На обойме 17 гайки, выполненной из немагнитного материала, установлен подшипник 18 и половины ради- ально-упорных подшипников 19 и 20, другие половины которых установлены в корпусе 21 через распорную втулку 22. На обойме 17 закреплена также ступица червячного колеса 23, венец которой также образован полюсами магнитов и охватывает червяк 24 на 180°. Червяк 24 выполнен из магнитопроводного материала и связан с двигателем 25. На корпусе 21 установлен концевой выключатель 26.
Привод поворота схвата 5 содержит червячную передачу, червяк 27 которой также выполнен из магнитопроводного материала и связан с двигателем 28, а червячное колесо 29 жестко связано с корпусом 30 схвата и также имеет венец, образованный полюсами постоянных магнитов, обеспечивая бесконтактную передачу усилий. Привод губок 31 схвата, двигатель которого закреплен на корпусе 30 схвата, имеет червячную и винтовую передачи, конструкция которых аналогична конструкции передач приводов линейного перемещения, в кото- рых усилие передается посредством магнитного поля, только винт 32 в этом случае, перемещаясь при вращении гайки 33, сводит или разводит губки 31 схвата. Позицией 34 обозначен червяк, а позицией 35 червячное колесо червячной передачи. Шаровые шарниры 36, связывающие приводы 7 и 9 с платформами, снабжены стопорами 37 для предотвращения их вращения.
Работа промышленного робота осуществляется включением двигателей соответствующих приводов. Например, для перемещения всех трех рук одновременно включаются двигатели привода продольного перемещения платформы 8, которые, вращая гайки в корпусах 12, обеспечивают перемещение этой платформы вдоль винтов 10 и 11. Относительное изменение положения рук в пространстве обеспечивается изменением вылета винтов приводов линейного перемещения 7 или 9 при вращении соответствующих гаек, установленных в корпусах этих приводов.
Аналогично при включении соответствующих двигателей осуществляется пово- рот схватов 5 и перемещение их губок 31.
Формула изобретения Промышленный робот, содержащий руку, состоящую из платформ треугольной
формы, каждая из которых связана с соседней платформой посредством трех приводов линейного перемещения, шарнирно установленных на этих платформах, а также расположенный на крайней платформе руки
схват, в корпусе которого установлен привод перемещения его губок, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения рабочей зоны, обеспечения возможности перехвата объекта манипулирования и обеспечения работоспособности в широком диапазоне температур, работы в газовой и водной среде высокого давления, вакуума, а также с
целью снижения потребления энергии за счет повышения КПД, он снабжен двумя дополнительными руками со схватами, приводами поворота схватов, каждый из которых включает двигатель и червячную передачу,
связанную с валом двигателя и с корпусом схвата, двумя дополнительными платформами, тремя дополнительными приводами линейного перемещения, установленными между этими платформами и шарнирно с
ними связанными, а также приводом продольного перемещения оДной из дополнительных платформ, включающим два винта, три двигателя, три корпуса и установленные в каждом корпусе червячную передачу и гайку, связанную через эту передачу с валом соответствующего двигателя, причем две гайки расположены на одном из винтов, третья на другом, а корпусе жестко связаны с этой дополнительной платформой, при
этом на другой дополнительной платформе установлены основная и дополнительные руки, а каждый из приводов линейного перемещения дополнительной платформы и платформ рук состоит из двигателя, корпуса, шарнирно связанного с одной из соседних платформ, и установленных в корпусе винтовой и червячной передач, причем червяк этого привода связан с валом двигателя, а червячное колесо жестко связано с гайкой
винтовой передачи этого привода, винт которого шарнирно связан с другой платформой, при этом привод губок схвата состоит из установленного на корпусе схвата двигателя, червячной и винтовой передач, причем
гайка винтовой передачи через червячную
передачу связана с валом двигателя, а винт шарнирно связан с губками схвата, кроме того, в каждой передаче всех приводов винт и червяк выполнены из магнитопроводного материала, а резьбовые выступы гайки и
5
////////////////777777
---
№/
венец червячного колеса червячной передачи являются полюсами магнитов и расположены с зазором относительно резьбовых IbicPrynoB соответствующего винта и зубцов соответствующего червяка.
гад
а
и
zc
08C89AL
9 ЪЩ
t
/Ј
/С
| Рука манипулятора | 1980 |
|
SU982896A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
