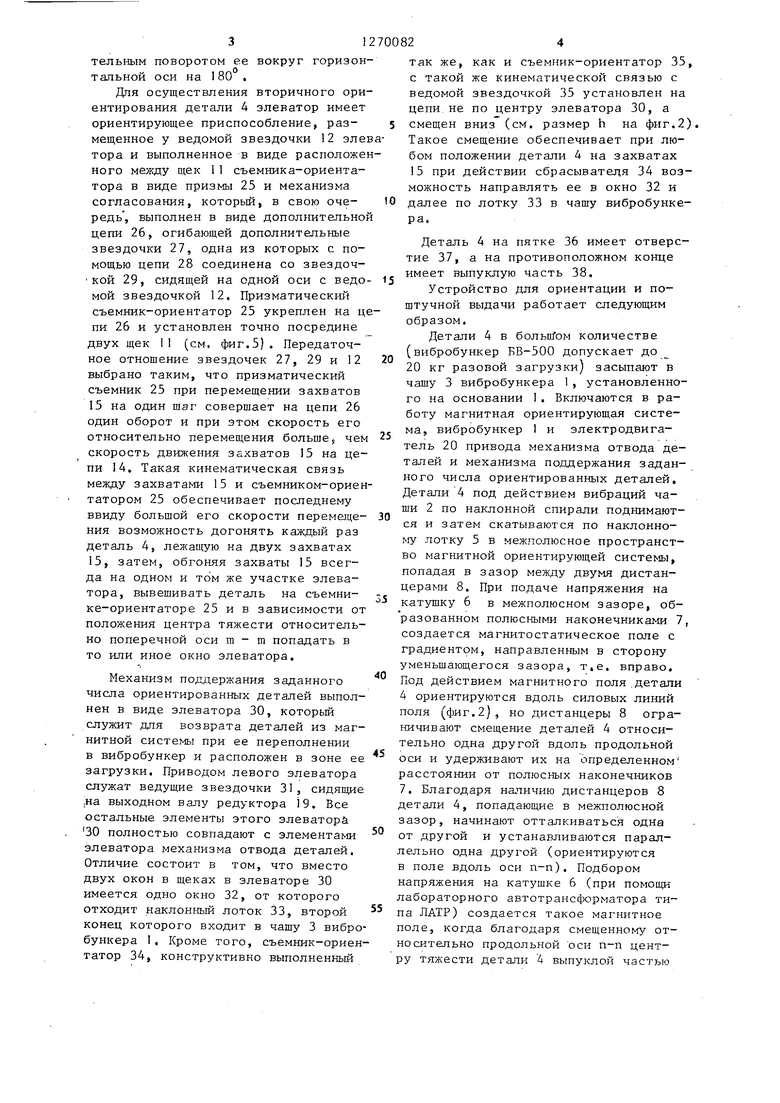
Изобретение относится к меопиностроению, в частности к автоматическим устройствам для поштучной выдачи ориентированных ферромагнитных асимметричных деталей с определенным так том ритмом). Цель изобретения - повьшение надежности и обеспечение поштучной выдачи плоских асимметричных ферромагнитных деталей со смещенным центром тяжести. .. На фиг. 1 изобра кено устройство для ориентации и поштучной выдачи, общий вид; на фиг.2 - разрез А-А на фиг.11 на фиг.З - узел I на-фиг.1; на фиг.4 - то же, вид сверху; на - вид Б на фиг.1, на фиг.6 ориентируемая деталь, вариант, на фиг.7 - то же, вид сверху. Устройство для ориентации и поштучной вьщачи деталей состоит из стандартного вибрационного бункера 1 типа БВ-500, установленного на основании 2, Вибрационный бункер имеет чашу 3, в которую насьтаются ориентируемые детали 4 в произвольном положении. На чаше 3 жестко закреплен наклонный лоток 5, свободный конец которого подходит к магнитноориентирующей системе. Магнитно-ориентирующая система представляет собой С-образньй магнит постоянного то ка, состоящий из электромагнитной катушки 6, подключенной к регулируемому источнику постоянного тока (не показан), Внутри электромагнитной ка тушки 6 помещен стальной магнитопровод (не показан, на концах которого жестко з-акреплены узкие полюсные наконечники 7 сужающегося в сторону зоны вывода деталей сечения. Полюсные наконечники 7 образуют между собой воздушный зазор переменного сечения V-образной формы, т.е. располо жены под углом друг к другу. В пространстве между полюсными наконечниками 7 расположены параллельно друг другу две пластины-дистанцеры 8, выполненные из немагнитной нержавеющей стали. Расстояние между пластинамидистанцерами на 1 ,5-2,0 мм больше мак симальной длины ориентируемой детали 4. Перпендикулярно дистанцерам 8 ниже полюсных наконечников 7 на магнитопроводе магнитно-ориентирующей системы жестко закреплена поддерживающая пластина 9, также выполненная из немагнитного материала. При подаче 2 2 напряжения постоянного тока на элект ромагнитную катушку 6 в пространстве между полюсными наконечниками 7 создается постоянное магнитное поле, градиент которого направлен в сторону сужающегося магнитого зазора, образованного полюсными наконечниками 7. На концах магнитных наконечников 7 установлены нагфотив друг друга магнитные концентраторы в виде регулируемых стержней 10, выполненных из магнитомягкой СТЕШИ, Выступаете стерз ней 0 за плоскость полюсных наконечников 7 приводит при включенной магнитно-ориентирующей системе к увеличению магнитной индукции по линии, соединяющей оси обоих стержней, что обеспечивает фиксацию детали .при продольном ее перемещении, В зоне вывода магнитно-ориентирующей системы установлен механизм отвода деталей в виде цепного элеватора, служащ1-5Й для поштучной выдачи ориентированных деталей из магнитноориентирующей системы и состоящий из двух боковых щек 11, расстояние между которыми равно расстоянию между дистанцерами 8. Между боковыми щеками П помещены ведомые 12 и ведущие 13 звездочки, соединенные велосипедной цепью 14; На звеньях цепи 14 на одинаковых уровнях с определенным шагом жестко закреплены Г-образные захваты 15 со скосом 16, изготовленные из немагнитной стали для уменьшения воздействия на магнитную индукцию в магнитной ориентирующей системе при прохожде:нни указанных захватов через нее. Ведуш11е звездочки 13 элеватора с помощью цепи 17 соединены с приводной звездочкой 18 редуктора 19, приводимого в действие двигателем 20 постоянного тока, обеспечивающего изменение числа оборотов выходных валов в широком диапазоне, На каждой из боковых щек I1 элеватора на пути движения деталей 4 в верхней части его выполнены оКна 21 и 22. От окна 2I отходит отводной , лоток 23, одним концом жестко закрепленный на боковой щеке 11. От окна 22 отходит ориентируюш,ий лоток 24, один конец которого соединен с второй боковой щекой 11, а второй конец соединен со свободным концом отводного лотка 23. Ориентирующий лоток 24 служит для выдачи детали 4 в ориентированном положении с предварительным поворотом ее вокруг горизон тальной оси на 180 . Для осуществления вторичного ори ентирования детали А элеватор имеет ориентирующее приспособление, размещенное у ведомой звездочки 12 эле тора и выполненное в виде расположе ного между щек 11 съемника-ориентатора в виде призмы 25 и механизма согласования, который, в свою очередь, выполнен в виде дополнительно цепи 26, огибающей дополнительные звездочки 27, одна из которых с помощью цепи 28 соединена со звездоч кой 29, сидящей на одной оси с ведо мой звездочкой 12. Призматический съемник-ориентатор 25 укреплен на ц пи 26 и установлен точно посредине двух щек 11 (см, фиг.5). Передаточное отнощение звездочек 27, 29 и 12 выбрано таким, что призматический съемник 25 при перемещении захватов 15 на один шзг соверщает на цепи 26 один оборот и при этом скорость его относительно перемещения больше чем скорость движения захватов 15 на цепи 14. Такая кинематическая связь между захватами 15 и съемником-ориен татором 25 обеспечивает последнему ввиду большой его скорости переме цения возможность догонять каждый раз деталь 4, лежа1дую на двух захватах 15, затем, обгоняя захваты 15 всегда на одном и том же участке элеватора, вывешивать деталь на съемнике-ориентаторе 25 и в зависимости от положения центра тяжести относительно поперечной оси m - m попадать в то или иное окно элеватора. Механизм поддержания заданного числа ориентированных деталей выполнен в виде элеватора 30, который служит для возврата деталей из магнитной системы при ее переполнении в вибробункер и расположен в зоне ее загрузки. Приводом левого элеватора служат ведущие звездочки 31, сидящие ,на выходном валу редуктора 19. Все остальные элементы этого элеватора 30 полностью совпадают с элементами элеватора механизма отвода деталей. Отличие состоит в том, что вместо двух окон в щеках в элеваторе 30 имеется одно окно 32, от которого отходит наклонный лоток 33, второй конец которого входит в чащу 3 вибро бункера I. Кроме того, съемник-ориен татор 34, конструктивно выполненный так же, как и съемник-ориентатор 35, с такой же кинематической связью с ведомой звездочкой 35 установлен на цепи не по центру элеватора 30, а смещен вниз (см. размер h на фиг.2). Такое смещение обеспечивает при любом положении детали 4 на захватах 15 при действии сбрасывателя 34 возможность направлять ее в окно 32 и далее по лотку 33 в чашу вибробункера. Деталь 4 на пятке 36 имеет отверстие 37, а на противоположном конце имеет выпуклую часть 38. Устройство для ориентации и поштучной выдачи работает следующим образом. Детали 4 в больп/ом количестве (вибробункер БВ-500 допускает до 20 кг разовой загрузки) засыпают в чашу 3 вибробункера 1, установленного на основании I. Включаются в работу магнитная ориентирующая система, вибробункер 1 и электродвигатель 20 привода механизма отвода деталей и механизма поддержания заданного числа ориентированных деталей. Детали 4 под действием вибраций чаши 2 по наклонной спирали поднимаются и затем скатываются по наклонному лотку 5 в межполюсное пространство магнитной ориентирующей системы, попадая в зазор между двумя дистанцерами 8. При подаче напряжения на катушку 6 в межполюсном зазоре, образованном полюсными наконечниками 7, создается магнитостатическое поле с градиентом, направленным в сторону уменьшающегося зазора, т.е. вправо. Под действием магнитного поля.детали 4 ориентируются вдоль силовых линий поля (фиг.2), но дистанцеры 8 ограничивают смещение деталей 4 относительно одна другой вдоль продольной оси и удерживают их на определенном расстоянии от полюсных наконечников 7. Благодаря наличию дистанцеров 8 детали 4, попадающие в межполюсной зазор, начинают отталкиваться одна от другой и устанавливаются параллельно одна другой (ориентируются в поле вдоль оси п-п). Подбором напряжения на катушке 6 (при помощи лабораторного автотрансформатора типа ЛАТР) создается такое магнитное поле, когда благодаря смещенному относительно продольной оси п-п центу тяжести детали 4 выпуклой частью 2 38 опускаются вниз, причем положение пятки 36 произвольное. При большой напряженности магнитного поля детали 4 выпуклой частью 38 разворачиваются до горизонтального положения, а при малой напряженности детали 4 уже не удерживаются магнитным полем и,плохо ориентируются по оси п-п. Поэтому под деталями 4 установлена поддерживающая пластина 9, которая гасит инерцию скатывающихся с лотка 5 деталей 4о Таким образом, детали 4, попав в межполюсное пространство магнитн:ой системы, получают первичное ориентирование, т.е. они все ориентированы по оси п-п и у всех деталей 4 центр тяжести лежит ниже оси п-п, т.е. все детали 4 выпуклой частью 38 обращены внизи только положение пятки 36 произвольно. Благодаря наличию градиента магнитного поля детали 4 из зоны загруз ки (место входа лотка 5 перемещаются вправо, не теряя полученную ориен тацию, и за счет наличия на полюсных наконечниках 7 магнитных концентрато ров 10 крайняя справа деталь 4 (фиг. занимает относительно захватов 15 строго определенное положение. При включении электродвигателя 20 враще ше от него через редуктор 19 передается приводной звездочке 18 и далее через цепь 17 на ведущие звездочки 13. Вращение от звездочки 13 передается на цепь 14, .что при водит к перемещению вверх попарно расположень ых захватов 5, которые, действуя своими скосами 16 на нижнюю часть детали 4,, поворачивают ее до горизонтального положения выпуклой частью 38 вправо (как указано пунктиром на фиг.4) и, выводя из зоны действия магнитного поля, поднимают. Как только деталь 4 предыдущими захватами выводится из поля, следующая деталь 4 начинает перемещаться Вправо под действием градиента магнитного поля и, дойдя до магнитных концентраторов 10, останавливается на пути действия скоса 16 следующего захвата 15. Таким образом каждая пара захватов 15 поднимает по одной детали 4, выпуклой частью 38 обращенной внутрь каждого элеватора независимо от того, в какую сто .рону направлена пятка 36 этой дета.ли 4. При перемещении цепей 14 -пере26мещаются и ведомые звездочки . 12, на одном валу которых сидит звездочка 29, которая через цепь 28 звездочки 27 приводит к перемещению съемникаориентатора 25, закрепленного на цепи 26, Так как скорость перемещения съемника-ориентатора 25 больше скорости подъема детали 4 на захватах 15, то он догоняет их и действует на деталь 4 по оси m-m, в результате чего деталь 4 постепенно вывешивается X на ребре съемника Ориентатора и, продолжая в то же время подниматься, в зависимости от положения центра тяжести, наклоняется, опускаясь пяткой 36 вниз и скользя ею по боковым щекам 11, При подходе к окну 22 деталь 4 (фиг.5 скатывается по ориентирующему лотку 24 в зону выдачи, переворачиваясь на 180 . Если при подходе к детали 4, лежаа ей на двух захватах 15, центр тяжести находится справа от осиподнимающего ее элеватора, то съемник-ориентатор 25, догоняя деталь 40 лежащую на захватах 15, приподнимает более легкий левый конец, а пятка наклоняется и, скользя по правой щеке 11 элеватора до совпадения с окном 21 , по лотку 23 скатывается в зону выдачи. Таким образом съемник-ориентатор 25, подходя с большей скоростью, чем поднимается деталь 4 на захватах 15, в зависимости от положения центра тяжести направляет ее в тот или иной отводящий лоток, один из которых, поворачивая деталь 4 вокруг горизонтальной оси, подводит ее в точку отбора в одном положении, т.е. обеспечивает вторичное ориентирование деталей. Элеватор 30 механизма поддержания заданного числа ориентированных деталей от дру1ого выходного вала редуктора 19. через звездочку 31 перемещает вверх такие же захваты 15, последние, проходя в зоне загрузки магнитно-ориентирующей системь, захватывают только те детали 4, которые полностью заполнили межполюсное пространство и сместились влево т.е. этот элеватор 30 поддерживает в магнитном поле определенное число деталей 4, что обеспечивает бесперебойную выдачу деталей 4 элеватором механизма отвода деталей с регулируемой производительностью. Кроме того, элеватор 30 стабилизирует процесс
первичного ориентирования деталей 4 в межполюсном зазоре. Вывод лишних деталей 4 производится следующим образом. При подъеме элеватором 30 деталей 4 из левой части магнитной системы съемник-ориентатор 34, кинематически связанный с ведомой звездочкой 35 элеватора 30, каждую поднимаемую захватами 15 деталь 4 направляет в окно 32. Деталь 4 по лотку 38 скатывается в чашу вибробункера 1 независимо от положения центра тяжести, так как съемник-ориентатор 34 смещен к щеке 11, противоположной окну 32.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки ферромагнитных цилиндрических изделий | 1983 |
|
SU1143677A1 |
| Устройство для транспортирования и накопления ферромагнитных деталей | 1986 |
|
SU1313630A1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЛЕГКОСЦЕПЛЯЕМЫХ ФЕРРОМАГНИТНЫХ ДЕТАЛЕЙ | 1991 |
|
RU2015091C1 |
| Автомат для сборки винтов с гайками | 1991 |
|
SU1816624A1 |
| Автомат для обработки и контроля деталей | 1988 |
|
SU1609539A1 |
| Устройство для подачи и перемещения цилиндрических изделий | 1981 |
|
SU954765A1 |
| Устройство для ориентированной поштучной выдачи деталей | 1977 |
|
SU634907A1 |
| Устройство для ориентации и поштучной выдачи ферромагнитных изделий | 1980 |
|
SU1001530A1 |
| Устройство для ориентированной подачи деталей типа заклепок | 1980 |
|
SU912610A1 |
| Загрузочный ротор | 1988 |
|
SU1593904A1 |

1. УСТРОЙСТВО ДЛЯ ОРИЕНТА1ЩИ И ПОШТУЧНОЙ ВЫДАЧИ, включающее бункерный загрузочный механизм и магнитную ориентирующую систему с полюсными наконечниками, расположенными под углом друг к другу, в зоне вывода которой установлен механизм отвода деталей, а в зоне загрузки размещен механизм поддержания .заданного числа ориентированных деталей, отличающее ся тем, что, с целью повышения надежности и обеспечения поштучной выдачи плоских асимметричных ферромагнитных деталей со смещенным центром тяжести, механизм отвода деталей и механизм поддержания заданного числа ориентированных деталей выполнены в виде цепных элеваторов с боковыми щеками, с ведущей и ведомой звездочками, отводящими лотками и с Г-образными диамагнитными захватами, имеющими скосы, и снабжены размещенными у ведомых звездочек соответствующего элеватора opиeнтиpyю ц ми приспособлениями, каждое из которых выполнено в виде расположенного между щеками соответствующего съемника-ориентатора и механизма согласования, причем механизм отвода деталей дополнительно снабжен ориентирующим лотком, один из концов которого соединен с отводным лотком, при этом магнитная ориентирующая система снабжена магнитными концентраторами, установленными в зоне отвода деталей, а каждый полюсный наконечник с 9 выполнен сужающегося сечения в сторону зоны отвода деталей. 2. Устройство по п.1, о т л и чающееся тем, что каждый механизм согласования выполнен в виде двух дополнительных звездочек и огибающей их дополнительной цепи, ю одна из которых установлена соосно с верхней звездочкой элеватора, при этом каждый съемник-ориентатор смонтирован на соответствующей дополнительной цепи.
TiTiTjjijiiiiiii :
| Устройство для перегрузки ферромагнитных цилиндрических изделий | 1983 |
|
SU1143677A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
