1
Изобретение относится к подъемно- транспортному и строительно-монтажно- у оборудованию и является усовершен- ствованием изобретения по авт. св. № 1271817.
Цель изобретения - повышение точности позиционирования.
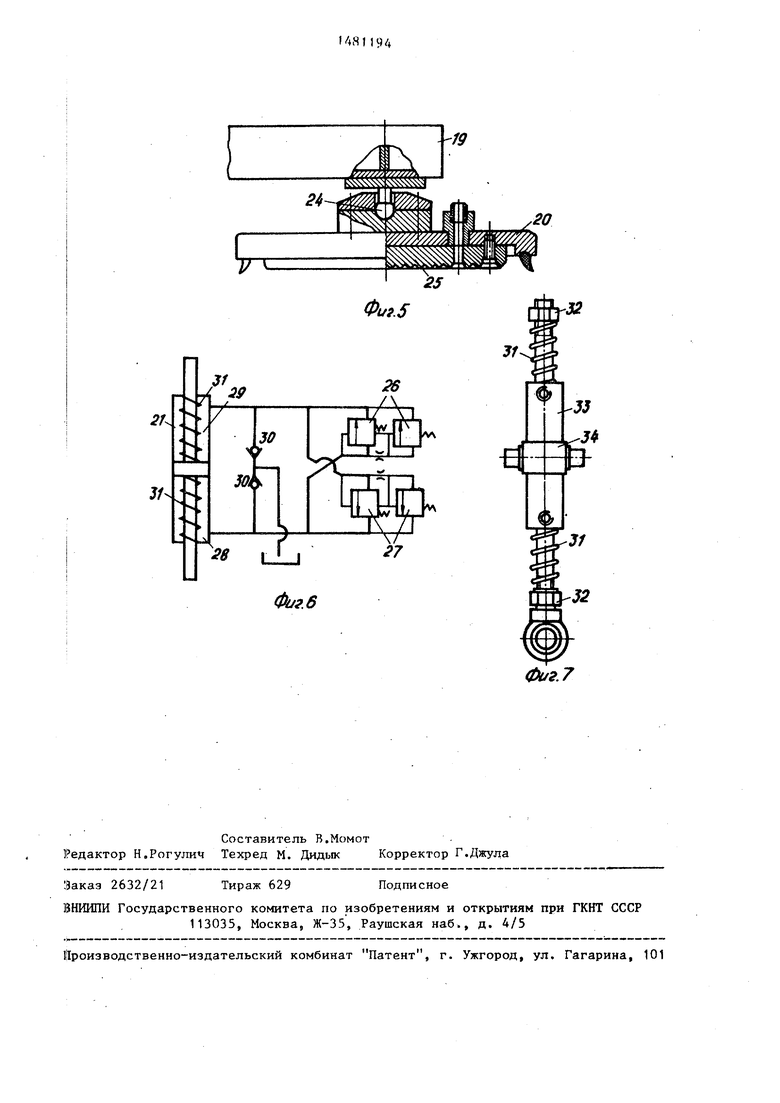
На фиг, 1 показан кран-манипуля- тор, вид сбоку$ на фиг, 2 - монтажная опора, аксонометрия} на фиг, 3 - опора при работе со стеновой панелью ; на фиг. А - то же, с панелью перекрытия на фиг. 5 - крепление опорной плиты в вакуумной камере; на фиг. 6 - схема соединения полостей гидроцилиндра на фиг. 7 - гидроцилиндр с возможностью регулирования степени поджатия возвратных пружин.
Кран-манипулятор (фиг. 1) состоит из ходовой платформы 1 с ходовыми тележками 2, перемещающимися по рельсовым путям. На платформе 1 установлены балласт 3 и башня 4. В верхней части башни 4 смонтированы механизм 5 поворота и оголовок 6, к которому стрела 7 и консоль 8 шарнирно прикреплены соответственно оттяжками 9 и 10.
Рабочий орган 11 (фиг. 2), подвешенный на канатной подвеске 12 кра- на-манипулятора, имеет возможность при своей работе опираться на перекрытия этажей монтируемого здания посредством опоры 13. Опора состоит из двухзвенной консоли, одно звено 14 которой горизонтально и одним концом расположено на вертикальной оси, рабочего органа 11. На другом конце звена 14 шарнирно закреплено второе звено 15 консоли, выполненное в форме параллелограмма, имеющего возмож- ность принудительного поворота в ве- вертикальной плоскости с помощью гидроцилиндра 16. На наружной стороне
параллелограмма жестко закреплена обойма 17, в которой подвижно установлена вертикальная стойка 18. В нижнем ее сечении шарнирно закреплены горизонтальные, радиально расположенные лучи 19, на концах которых шарнирно закреплены вакуумные камеры 20, Лучи 19 соединены со штоками двухштоковых гидроцилиндров 21.
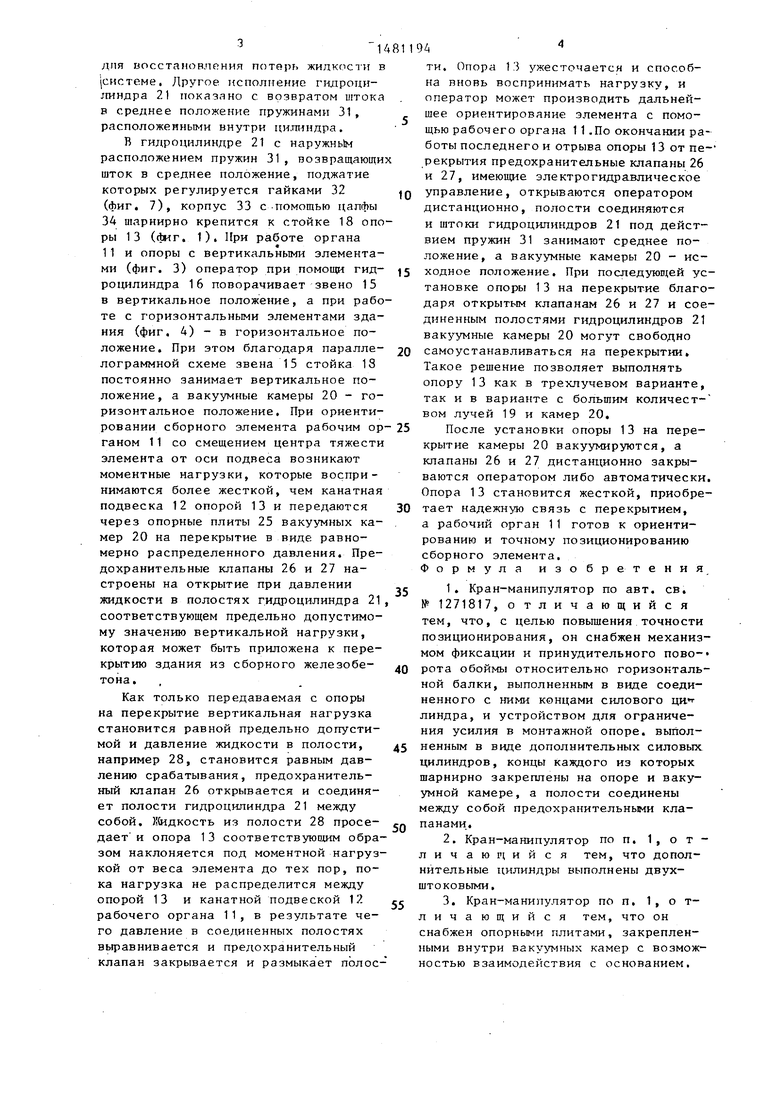
При работе со стеновой панелью 22
5 (фиг. 3) параллелограммное звено 15 вертикально и стойка 18 опирается на перекрытие нижележащего этажа. При работе с панелью перекрытия 23 (фиг, 4) монтируемого этажа звено
0 15 горизонтально, а вертикальная стойка 18 опирается на ранее установленные панели перекрытия монтируемого этажа. Вакуумная камера 20 с помощью шарового шарнира 24 закреплена на луче 19 (фиг, 5). Внутри камеры 20 закреплена жесткая плита 25 с развитой опорной поверхностью. Для увеличения сцепления опоры 13 с перекрытием, опорная поверхность плиты 25 имеет
0 насечку.
Гидравлическая схема соединения полостей двухштокового гидроцилиндра 21 (фиг. 6) содержит два предохранн- тельных клапана 26 и 27 (показан ва5 риант клапанов не прямого действия, имеющих стабильные характеристики и допускающих большие расходы жидкости) Клапан 26 соединяет полость 28 с полостью 29, а клапан 27 - наоборот.
0 Подпиточные клапаны 30 предназначены
i14
дня восстановления потерь жидкости в (системе. Другое исполнение гидроцилиндра 21 показано с возвратом штока в среднее положение пружинами 31, расположенными внутри цилиндра.
В гидроцилиндре 21 с наружным расположением пружин 31, возвращающи шток в среднее положение, поджатие которых регулируется гайками 32 (фиг. 7), корпус 33 с-помощью цапфы 34 шарнирно крепится к стойке 18 опоры 13 (фиг. 1), При работе органа
«
11 и опоры с вертикальными элементами (фиг. 3) оператор при помощи гид- роцилиндра 16 поворачивает звено 15 в вертикальное положение, а при работе с горизонтальными элементами здания (фиг. 4) - в горизонтальное положение. При этом благодаря паралле- лограммной схеме звена 15 стойка 18 постоянно занимает вертикальное положение, а вакуумные камеры 20 - горизонтальное положение. При ориентировании сборного элемента рабочим ор ганом 11 со смещением центра тяжести элемента от оси подвеса возникают моментные нагрузки, которые воспринимаются более жесткой, чем канатная подвеска 12 опорой 13 и передаются через опорные плиты 25 вакуумных камер 20 на перекрытие в виде равномерно распределенного давления. Предохранительные клапаны 26 и 27 настроены на открытие при давлении жидкости в полостях гидроцилиндра 21 соответствующем предельно допустимому значению вертикальной нагрузки, которая может быть приложена к перекрытию здания из сборного железобе- тона.
Как только передаваемая с опоры на перекрытие вертикальная нагрузка становится равной предельно допустимой и давление жидкости в полости, например 28, становится равным давлению срабатывания, предохранительный клапан 26 открывается и соединяет полости гидроцилиндра 21 между собой. )идкость из полости 28 просе- дает и опора 13 соответствующим образом наклоняется под моментной нагрузкой от веса элемента до тех пор, пока нагрузка не распределится между опорой 13 и канатной подвеской 12 рабочего органа 11, в результате чего давление в соединенных полостях выравнивается и предохранительный клапан закрывается и размыкает полос
JQ
5 0 25 30 Q
з g е
5
94
ти. Опора 13 ужесточается и способна вновь воспринимать нагрузку, и оператор может производить дальнейшее ориентирование элемента с помощью рабочего органа 11 .По окончании работы последнего и отрыва опоры 13 от пе-1 рекрытия предохранительные клапаны 26 и 27, имеющие электрогидравлическое управление, открываются оператором дистанционно, полости соединяются и штоки гидроцилнндров 21 под действием пружин 31 занимают среднее положение, а вакуумные камеры 20 - исходное положение. При последующей установке опоры 13 на перекрытие благодаря открытым клапанам 26 и 27 и соединенным полостями гидроцилиндров 21 вакуумные камеры 20 могут свободно самоустанавливаться на перекрытии. Такое решение позволяет выполнять опору 13 как в трехлучевом варианте, так и в варианте с большим количест- вом лучей 19 и камер 20.
После установки опоры 13 на перекрытие камеры 20 вакуумируются, а клапаны 26 и 27 дистанционно закрываются оператором либо автоматически. Опора 13 становится жесткой, приобретает надежную связь с перекрытием, а рабочий орган 11 готов к ориентированию и точному позиционированию сборного элемента. Формула изобретения
1.Кран-манипулятор по авт. св. № 1271817, отличающийся тем, что, с целью повышения точности позиционирования, он снабжен механизмом фиксации и принудительного пово-« рота обоймы относительно горизонтальной балки, выполненным в виде соединенного с ними концами силового линдра, и устройством для ограничения усилия в монтажной опоре, выполненным в виде дополнительных силовых цилиндров, концы каждого из которых шарнирно закреплены на опоре и вакуумной камере, а полости соединены между собой предохранительными клапанами.
2.Кран-манипулятор по п. отличающийся тем, что дополнительные цилиндры выполнены двух- штоковыми,
3.Кран-манипулятор по п. отличающийся тем, что он снабжен опорными плитами, закрепленными внутри вакуумных камер с возможностью взаимодействия с основанием.
7
W
4
tr
«M
fc
//////s
ш
S//////S/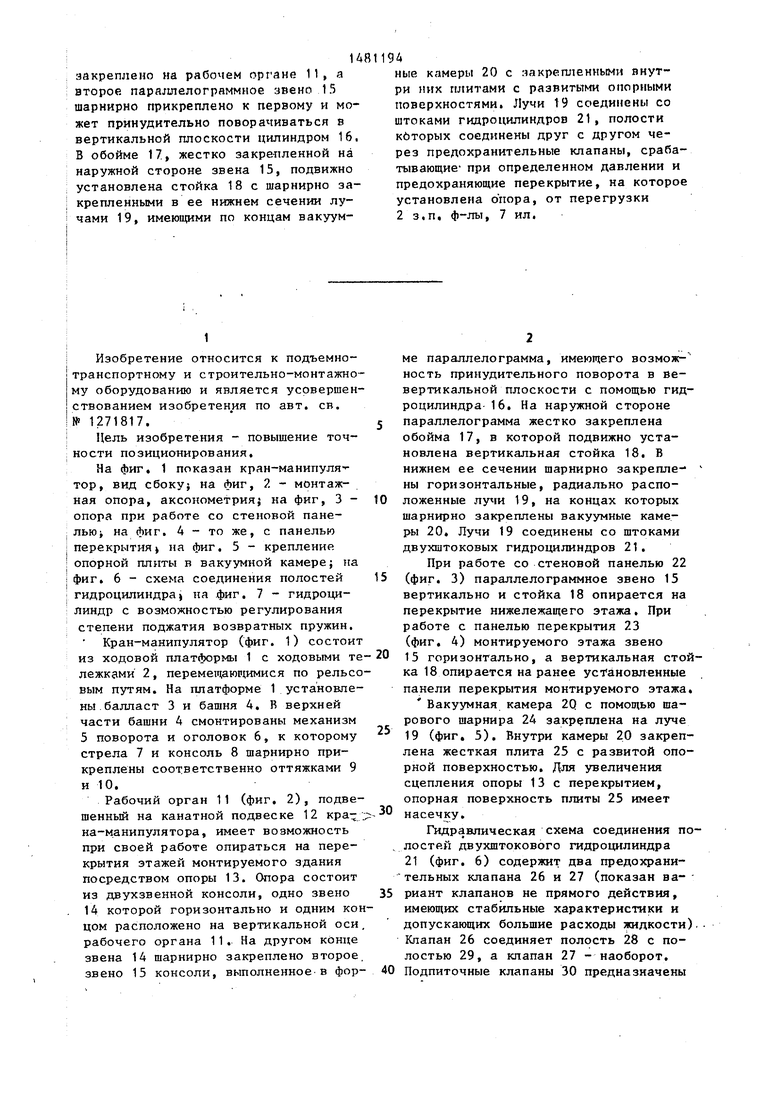
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 1985 |
|
SU1271817A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Кондуктор агзамова для монтажа строительных конструкций | 1978 |
|
SU763559A1 |
| Кондуктор для монтажа строительных конструкций | 1982 |
|
SU1035173A1 |
| УСТРОЙСТВО ДЛЯ ПОДЗЕМНОЙ РАЗРАБОТКИ МОЩНЫХ И КРУТОПАДАЮЩИХ ЗАЛЕЖЕЙ КАЛИЙНЫХ РУД | 2013 |
|
RU2540736C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ | 2003 |
|
RU2240226C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, МНОГОСЛОЙНАЯ ПАНЕЛЬ, РАСКЛАДНАЯ ОПАЛУБКА ДЛЯ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ПО ИЗГОТОВЛЕНИЮ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНО-КАРКАСНОГО ЗДАНИЯ ИЗ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ С ДЕКОРАТИВНОЙ НАРУЖНОЙ ОТДЕЛКОЙ | 2012 |
|
RU2515491C1 |
| Универсальная гидравлическая зажимная установка - стенд для позиционирования и герметизации фланцевой трубопроводной арматуры с настраиваемой системой зажима | 2022 |
|
RU2818609C2 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
Изобретение относится к подъемно-транспортному и строительно-монтажному оборудованию. Цель изобретения - повышение точности позиционирования. Кран-манипулятор содержит рабочий орган 11, подвешенный на канатной подвеске 12 с возможностью опирания на перекрытия монтируемого здания посредством опоры 13. Последняя содержит двухзвенную консоль, одно звено 14 которой горизонтально и закреплено на рабочем органе 11, а второе параллелограммное звено 15 шарнирно прикреплено к первому и может принудительно поворачиваться в вертикальной плоскости цилиндром 16. В обойме 17, жестко закрепленной на наружной стороне звена 15, подвижно установлена стойка 18 с шарнирно закрепленными в ее нижнем сечении лучами 19, имеющими по концам вакуумные камеры 20 с закрепленными внутри них плитами с развитыми опорными поверхностями. Лучи 19 соединены со штоками гидроцилиндров 21, полости которых соединены друг с другом через соединены со штоками гидроцилиндров 21, полости которых соединены друг с другом через предохранительные клапаны, срабатывающие при определенном давлении и предохраняющие перекрытие, на которое установлена опора, от перегрузки. 2 з.п. ф-лы. 7 ил.
-3Оч
ОС
г
81
гг
ж
i
и
а
V
21
Фиг б
Составитель В.Момот Редактор Н.Рогулич Техред М. Дидык Корректор Г.Джула
Заказ 2632/21
Тираж 629
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
19
фиг.7
Подписное
| Кран-манипулятор | 1985 |
|
SU1271817A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
