менты 12, 15 выделения модуля подключены к блоку 13 выделения наименьшего сигнала. Сигнал с блока 13 поступает на вход второго НЭ 17, на выходе которого сигнал имеется при скоростях Г, близких к номинальным. Выходы НЭ 10 и 17 подключены к третьему НЭ 16, где осуществляется выявление режима малой нагрузки. На вьгкоде НЭ -16 появляется сигнал при
малой нагрузке на механизм хода, уменьшающий возбуждение электроприводов и увеличивающий тем самым их скорость. При отсутствии сигналов. . на выходе обоих или одного из , 17 регулятор возбуждения, подключённый к выходам НЭ 16, задает на соедине нньй с ним управляемый усилитель 19 сигнал, соответствующий максимальному току возбуждения. 1 ил.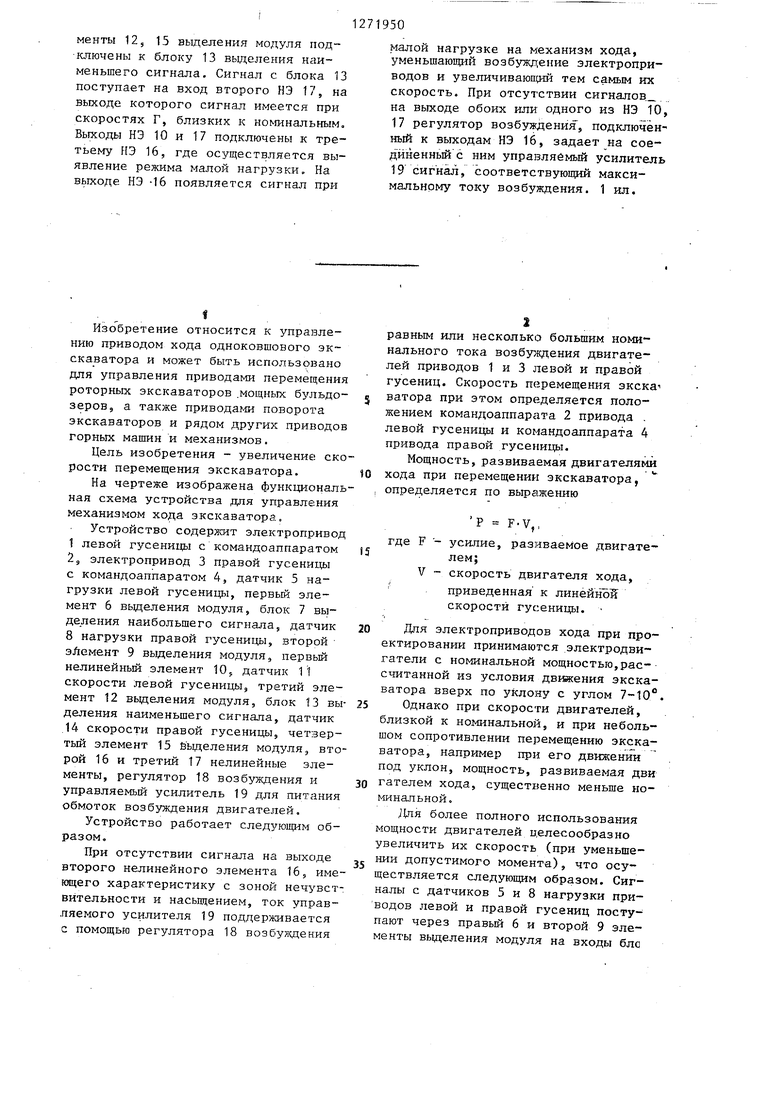

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ХОДА ЭКСКАВАТОРА | 2000 |
|
RU2193629C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ХОДА ЭКСКАВАТОРА(ВАРИАНТЫ) | 2001 |
|
RU2235831C2 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Способ управления драглайном и устройство его осуществления | 1989 |
|
SU1707148A1 |
| Электропривод постоянного тока | 1978 |
|
SU748756A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРООБОРУДОВАНИЕМ ПРИ ПЕРЕГОНЕ ЭКСКАВАТОРА | 2018 |
|
RU2670964C9 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Устройство для управления механизмом экскаватора | 1978 |
|
SU773212A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
Изобретение предназначено для управления приводами перемещения и поворота роторных экскаваторов мощных бульдозеров. Цель изобретения увеличение скорости перемещения экскаватора. Устройство содержит электроприводы левой и правой гусениц с командоконтроллерами.Датчики 5 и 8 нагрузки левой и правой гусениц (Г) через элементы 6 и 7 выделения модуля подключены к блоку 7 выделения наибольшего сигнала, выход которого связан с одним из нелинейных элементов (НЭ) 10. На выходе НЭ 10 сигнал снимается только при значительной нагрузке электроприводов правой и левой Г. Сигналы с датчиков 11 и 14 скорости левой и правой Г через эле
Изобретение относится к управлению приводом хода одноковшового экскаватора и может быть использовано для управления приводами перемещения роторных экскаваторов .мощных бульдозеров, а также приводаг-ш поворота экскаваторов и рядом других приводов горных машин и механизмов.
Цель изобретения - увеличение; скорости перемещения экскаватора.
На чертеже изображена функциональная схема устройства для управления механизмом хода экскаватора.
Устройство содержит электропривод 1 левой гусеницы с командоаппаратом 2, электропривод 3 правой гусеницы с командоаппаратом 4, датчик 5 нагрузки левой гусеницы, первьш элемент 6 вьщеления модуля, блок 7 выделения наибольшего сигнала, датчик 8 нагрузки правой гусеницы, второй элемент 9 выделения модуля, первьй нелинейный элемент 10, датчик 11 скорости левой гусеницы, третий элемент 12 выделения модуля, блок 13 выделения наименьшего сигнала, датчик 14 скорости правой гусеницы, четзертьй элемент 15 бьщеления модуля, второй 16 и третий 17 нелинейные элементы, регулятор 18 возбуждения и управляемый усилитель 19 для питания обмоток возбуждения двигателей.
Устройство работает следзющим образом.
При отсутствии сигнала на выходе второго нелинейного элемента 16, име кяцего характеристику с зоной нечувствительности и насыщением, ток управляемого усилителя 19 поддерживается с помощью регулятора 18 возбуждения
2
равным или несколько большим номинального тока возбуждения двигателей приводов 1 и 3 левой и правой гусениц. Скорость псгремещения экска
ватора при этом определяется положением командоаппарата 2 привода . левой гусеницы и командоаппарата 4 привода правой гусеницы.
Мощность, развиваемая двигателями
хода при перемещении экскаватора, определяется по вьгражению
Р F-V,,
где F - усилие, разиваемое двигателем;
V скорость двигателя хода, приведенная к линейной скорости гусеницы.
Для электроприводов хода при проектировании принимаются электродвигатели с номинальной мощностью,рас- считанной из условия дв исения экскаватора вверх по уклону с углом 7-10,
Однако при скорости двигателей, близкой к номинальной, и при небольшом сопротивлении перемещению экскаватора, например при его движении под уклон, мощность, развиваемая дни
гателем хода, существенно меньше но инaльнoй.
Для более полного использования мощности двигателей целесообразно увеличить их скорость (при уменьшеНИИ допустимого момента), что осуществляется следующим образом. Сигналы с датчиков 5 и 8 нагрузки приводов левой и правой гусениц постудают через правый 6 и второй 9 элементы выделения модуля на входы блс
| Чукаев Д.С., Федуркина М.Д | |||
| Электрооборудование строительных машин и электроснабжение строит.ел ньпс площадок | |||
| - М.: Стройиздат, 1981, с | |||
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
| Андрианов Е.И., Качкин Ю.М., Сушинский В.А | |||
| Охлаждаемая камера горения для двигателей внутреннего горения | 1925 |
|
SU2503A1 |
| - М.: Эне гия, 1977, с.35 | |||
| Бариев Н.В | |||
| Электрооборудовани одноковшовых экскаваторов | |||
| - М.: Энергия, 1980, .с.180-190 | |||
| Тетельбаум И.М.,Шнейдер Ю.Ф | |||
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |
| - М.: Энергия, 1978 | |||
| Нестеренко Б.К.Интегральные операционные усилители | |||
| - М.: Энергоиздат, 19.82. | |||
