Изобретение относится к управлению электроприводом передвижения машин, в особенности электроприводу хода карьерных экскаваторов.
Известны устройства управления электроприводом хода экскаваторов, обеспечивающие в зависимости от нагрузки на механизм две зоны регулирования скорости передвижения: до номинальной скорости при больших нагрузках; до максимальной скорости при малых нагрузках.
В качестве прототипа принято устройство [1] управления электроприводом механизма хода экскаватора, содержащее электропривод левой гусеницы, электропривод правой гусеницы, каждый из которых состоит из последовательно соединенных командоаппарата, регулятора напряжения, регулятора тока, преобразователя, двигателя, датчиков нагрузки, датчиков скорости, обмоток возбуждения двигателей этих приводов, подключенных последовательно к выходу управляемого усилителя.
Увеличение скорости двигателя выше номинальной осуществляется ослаблением поля возбуждения двигателя, при условии, что величина нагрузки на валу обоих двигателей будет одновременно меньше заданной, равной примерно величине 0,7...0,8 от номинального значения момента двигателя.
Указанное устройство имеет ряд недостатков. Поскольку регулирование скорости двигателя выше ее номинального значения осуществляется ослаблением его поля возбуждения, то для получения сигнала по моменту требуется четыре датчика (два датчика нагрузки и два датчика скорости), элементы выделения по модулю сигналов от этих датчиков, а также нелинейные элементы.
Для регулирования тока возбуждения двигателей требуется специальный управляемый усилитель с широким диапазоном регулирования.
Наконец, при максимальной скорости двигателя снижается допустимая величина нагрузки на валу двигателя до величины, равной 0,7...0,8 от номинального значения момента двигателя, что снижает маневренность и скорость передвижения экскаватора.
Предлагаемое изобретение решает задачу повышения маневренности, скорости передвижения, упрощения схемы устройства с использованием регулирования скорости двигателя выше номинального значения путем увеличения напряжения на якоре двигателя до величины выше номинального значения и автоматического перевода рабочей точки скорости с одной зоны регулирования на другую.
Указанная цель может быть достигнута тремя вариантами устройств.
Согласно первому варианту изобретения устройство управления электроприводом хода экскаватора, содержащее электропривод левой гусеницы, электропривод правой гусеницы, каждый из которых состоит из последовательно соединенных командоаппарата, регулятора напряжения, регулятора тока, преобразователя, двигателя, датчика тока, датчика напряжения, согласно изобретению снабжено логическим элементом ИЛИ, а в каждой привод дополнительно введены пороговый элемент, элемент со ступенчатым изменением сопротивления, причем выход датчика тока каждого привода через пороговый элемент подключен к входу логического элемента ИЛИ, на выходе которого подключены два элемента со ступенчатым изменением сопротивления, каждый из которых включен в цепь обратной связи регулятора напряжения каждого привода.
Согласно второму варианту изобретения устройство управления электроприводом хода экскаватора, содержащее электропривод левой гусеницы, электропривод правой гусеницы, каждый из которых состоит из последовательно соединенных командоаппарата, регулятора напряжения, регулятора тока, преобразователя, двигателя, датчика тока, датчика напряжения, согласно изобретению снабжено логическим элементом ИЛИ, а в каждый привод дополнительно введены ключ, первый пороговый элемент, второй пороговый элемент, причем выход датчика напряжения каждого привода через первый пороговый элемент подключен к входу логического элемента ИЛИ, на выходе которого подключены два ключа, каждый из которых подключен через второй пороговый элемент к регулятору напряжения каждого привода.
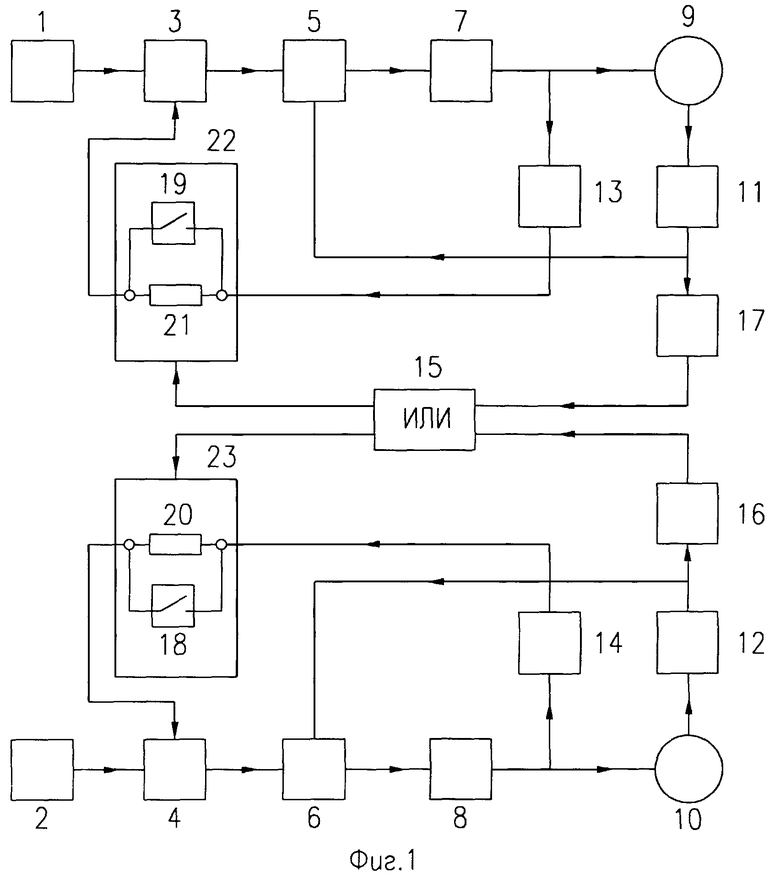
На фиг.1 изображена схема первого варианта заявленного устройства, содержащего электропривод левой гусеницы, электропривод правой гусеницы, каждый из которых состоит из последовательно соединенных командоаппарата 1, 2; регулятора 3, 4 напряжения; регулятора 5, 6 тока; преобразователя 7, 8; двигателя 9, 10; датчика 11, 12 тока; датчика 13, 14 напряжения. Согласно изобретению устройство снабжено логическим элементом 15 ИЛИ, а в каждый привод дополнительно введены пороговый элемент 16, 17, выполненный, например, на базе компаратора; элемент 22, 23 со ступенчатым изменением сопротивления, выполненный, например, как ключ 18, 19 на базе транзистора и параллельно подключенного ему резистора 20, 21, причем выход датчика 11, 12 тока каждого привода через пороговый элемент 16, 17 подключен к входу логического элемента 15 ИЛИ, на выходе которого подключены два элемента 22, 23 со ступенчатым изменением сопротивления, каждый из которых включен в цепь обратной связи регулятора напряжения 3, 4.
Устройство, приведенное на фиг.1, работает следующим образом.
Как видно из фиг.1, в процессе работы на вход пороговых устройств 16, 17 поступают сигналы от датчиков тока 11, 12.
Условно можно принять, что если величина тока нагрузки (момента) любого из двигателей превышает заданное значение, 1-1,5-кратное от величины номинального тока якоря двигателя, то величина сигнала на выходе порогового устройства 16, 17 равна 1. Этот сигнал поступает на вход логического элемента 15. При наличии хотя бы одной единицы на входе логического элемента 15 на его выходе появляется сигнал, вызывающий одновременное ступенчатое уменьшение сопротивления элемента 22, 23 (срабатывание ключей 18 и 19, шунтирующих резисторы 20, 21), что усиливает коэффициент передачи в цепи обратной связи регуляторов 3, 4 напряжений, что снижает максимальное напряжение (скорости) на якорях двигателей 9, 10 до величины, не превышающей номинальное значение, тем самым обеспечивая автоматически двухзонное регулирование скорости приводов.
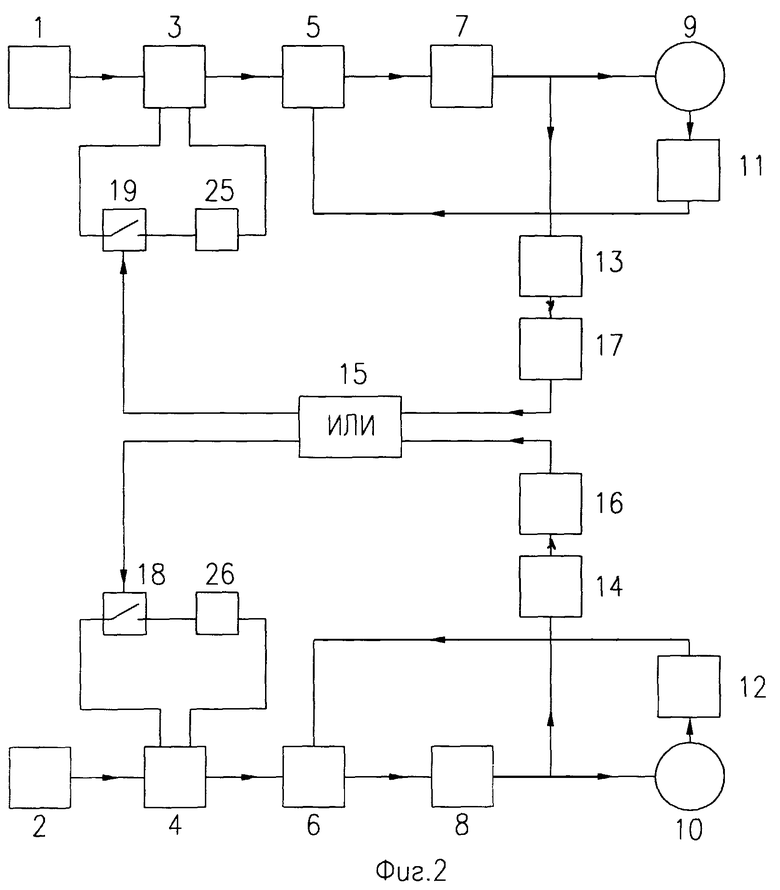
На фиг.2 изображена схема второго варианта заявленного устройства, содержащего электропривод левой гусеницы, электропривод правой гусеницы, каждый из которых состоит из последовательно соединенных командоаппаратов 1, 2; регулятора 3, 4 напряжения; регулятора 5, 6 тока; преобразователя 7, 8; двигателя 9, 10; датчика тока 11, 12; датчика напряжения 13, 14. Согласно изобретению устройство снабжено логическим элементом 15 ИЛИ, а в каждый привод дополнительно введен ключ 18, 19, выполненный, например, на базе транзистора, первый пороговый элемент 16, 17, выполненный, например, на базе компаратора или стабилитронов; второй пороговый элемент 25, 26, выполненный, например, на базе компаратора или стабилитронов, причем выход датчика 13, 14 напряжения каждого привода через первый пороговый элемент 16, 17 подключен к входу логического элемента 15 ИЛИ, на выходе которого подключены два ключа 18, 19, каждый из которых подключен через второй пороговый элемент 25, 26 к регулятору напряжения 3, 4 привода.
Устройство, приведенное на фиг.2, работает следующим образом.
Как видно из фиг.2, в процессе работы на вход пороговых устройств 16, 17 поступают сигналы от датчиков 13, 14 напряжения.
Условно можно считать, что если величина напряжения (скорости) любого из двигателей превышает номинальное значение, то величина сигнала на выходе первого порогового элемента 16, 17 равна 1. Этот сигнал поступает на вход логического элемента 15. При наличии хотя бы одной единицы на входе логического элемента 15 на его выходе появляется сигнал, вызывающий срабатывание ключей 18, 19, подключающих второй пороговый элемент 25, 26 к регулятору 3, 4 напряжения, тем самым снижая величину тока отсечки при максимальной скорости каждого привода до величины, равной 1-1,5-кратной от величины номинального тока (момента) якоря двигателя, обеспечивая автоматическое двухзонное регулирование приводов.
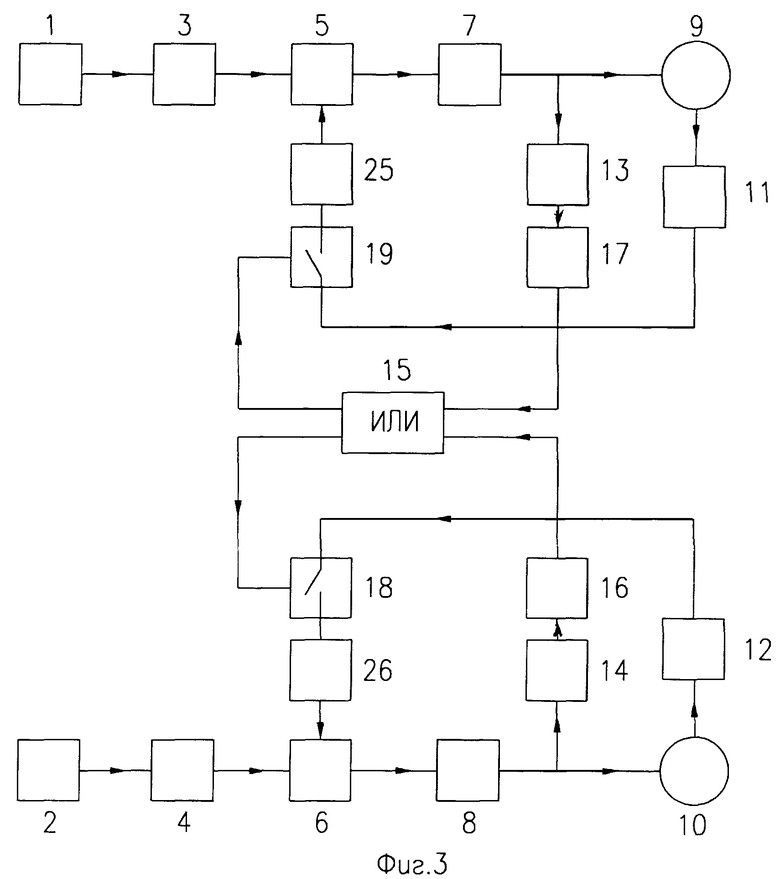
На фиг.3 изображена схема третьего варианта заявленного устройства, содержащего электропривод левой гусеницы, электропривод правой гусеницы, каждый из которых состоит из последовательно соединенных командоаппарата 1, 2; регулятора 3, 4 напряжения; регулятора 5, 6 тока; преобразователя 7, 8; двигателя 9, 10; датчика тока 11, 12; датчика напряжения 13, 14. Согласно изобретению устройство снабжено логическим элементом 15 ИЛИ, а в каждый привод дополнительно введены ключ 18, 19; первый пороговый элемент 16, 17; второй пороговый элемент 25, 26; причем датчик напряжения 13, 14 каждого привода через первый пороговый элемент 16, 17 подключен к входу логического элемента 15 ИЛИ, на выходе которого подключены два ключа 18, 19, каждый из которых через второй пороговый элемент 25, 26 подключен к регулятору тока 5, 6.
Устройство, приведенное на фиг.3, работает следующим образом.
Как видно из фиг.3, в процессе работы на вход первого порогового элемента 16, 17 поступает сигнал от датчиков 13, 14 напряжения.
Условно можно считать, что если величина напряжения (скорости) любого из двигателей 9, 10 превышает номинальное значение, то величина сигнала на выходе первого порогового элемента 16, 17 равна 1. Этот сигнал поступает на вход логического элемента 15 ИЛИ. При наличии хотя бы одной единицы на входе логического элемента 15 на его выходе появляется сигнал, вызывающий срабатывание ключей 18, 19, подключающих второй пороговый элемент 25, 26 к регулятору тока 5, 6, тем самым снижая величину тока отсечки при максимальной скорости каждого привода, обеспечивая автоматически двухзонное регулирование приводов.
В том случае, если обе гусеницы имеют один общий электропривод, реализация устройства упрощается. В этом случае нет необходимости в использовании логического элемента ИЛИ.
Источники информации
1. Авт. cв. СССР № 1271930, кл. Е 02 F 9/20, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ХОДА ЭКСКАВАТОРА | 2000 |
|
RU2193629C2 |
| Электропривод переменного тока | 1984 |
|
SU1251280A1 |
| Устройство для управления механизмом хода экскаватора | 1985 |
|
SU1271950A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1627622A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1987 |
|
SU1532674A1 |
Изобретение относится к управлению электроприводом передвижения машин, в особенности электроприводу хода карьерных экскаваторов. Техническим результатом изобретения является повышение эффективности передвижения экскаваторов за счет повышения максимального момента при скоростях не выше номинальной без увеличения габаритной мощности двигателей электропривода. Для этого в электропривод правой и левой гусеницы, каждый из которых состоит из последовательно соединенных командоаппарата задающего сигнала, регулятора напряжения (РН), регулятора тока (РТ), преобразователя и питаемого от него двигателя, датчика тока и датчика напряжения двигателя , согласно изобретению вводят логический элемент ИЛИ. При этом в каждый привод дополнительно вводят для первого варианта изобретения - пороговый элемент (ПЭ) и элемент со ступенчатым изменением сопротивления. Причем выход датчика тока каждого привода через ПЭ подключен к входу логического элемента ИЛИ, на выходе которого подключены два элемента со ступенчатым изменением сопротивления, включенные в цепь обратной связи РН. Для второго варианта вводят ключ, первый и второй ПЭ. Причем выход датчика напряжения каждого привода через первый ПЭ подключен к входу логического элемента ИЛИ, на выходе которого подключены два ключа, каждый из которых подключен через второй ПЭ к РН каждого привода. Для третьего варианта в устройство вводят ключ, первый и второй ПЭ. Причем выход датчика напряжения каждого привода через первый ПЭ подключен к входу логического элемента ИЛИ, на выходе которого подключены два ключа, каждый из которых подключен через второй ПЭ к РТ каждого привода. 3 с.п. ф-лы, 3 ил.
| Устройство для управления механизмом хода экскаватора | 1985 |
|
SU1271950A1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1987 |
|
SU1509488A1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1987 |
|
SU1532674A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
| RU 2055971 C1, 10.03.1996 | |||
| ЭКСКАВАТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2068615C1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| GB 2279774 A, 11.01.1995. | |||

