513 S ti, 8
9
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения (его варианты) | 1984 |
|
SU1241404A1 |
| Линейный шаговый электропривод | 1984 |
|
SU1244780A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1985 |
|
SU1274111A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1982 |
|
SU1108598A1 |
| Вентильный электропривод | 1990 |
|
SU1758788A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1981 |
|
SU1003280A2 |
| Способ стабилизации тока якоря электродвигателя постоянного тока | 1984 |
|
SU1270854A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОГЕНЕРАТОРОМ | 2013 |
|
RU2537394C1 |
| Устройство для управления линейным электродвигателем постоянного тока | 1979 |
|
SU855916A1 |
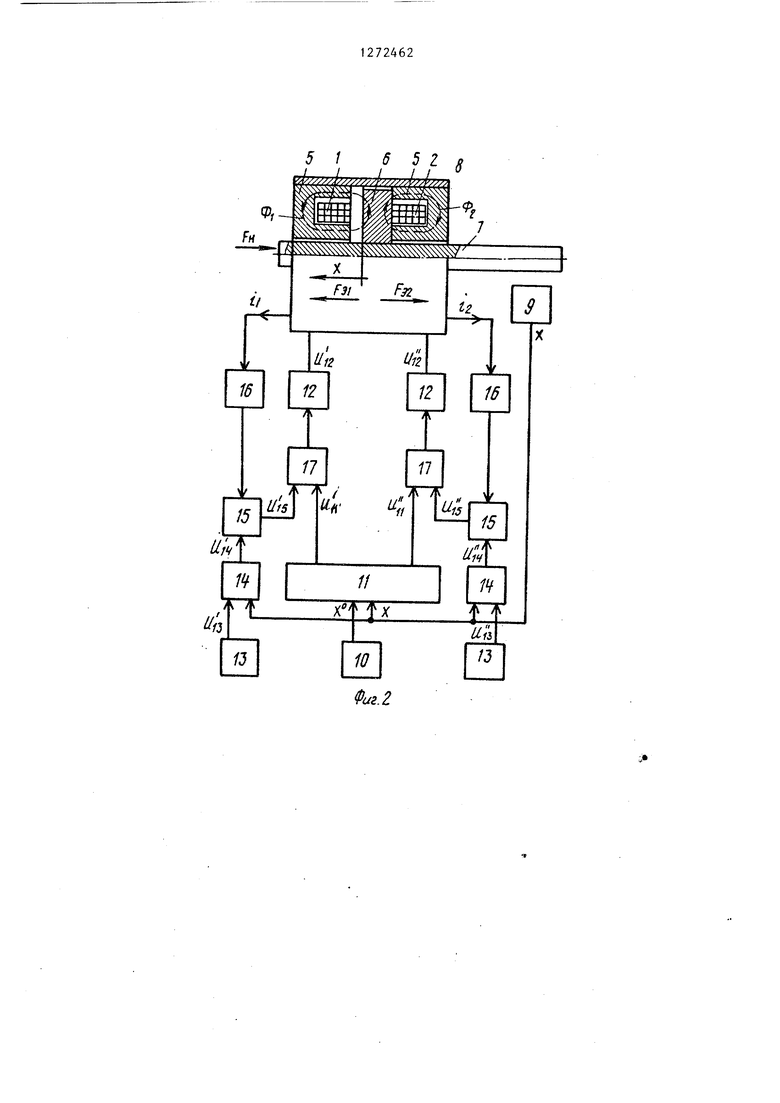
Изобретение относится к управлению электрическими машинами.Цель изобретения - повышение точности воепроизведения заданных движений и расширение области устойчивой работы электропривода возвратно-поступательного движения. Привод содержит электромагнитный двигатель с обмотками подмагничивания 1 и 2 и управ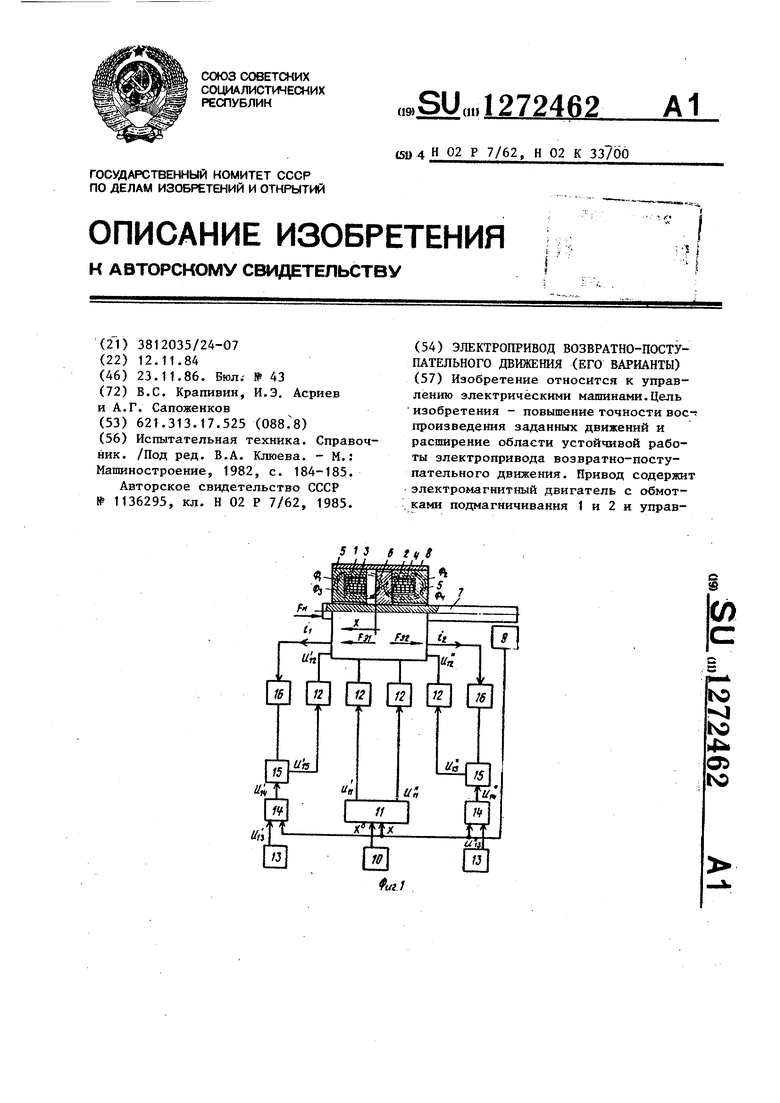
ленид 3 и 4, размещенными на магнитопроводах 5, и ферромагнитным якорем 6, жестко закрепленным на немагнитном штоке 7, датчики положения якоря 9, программный блок 10, регулятор перемещения 11, усилители 12, источники задающих напряжений 13, а также блоки функций двух переменных 14, блоки сравнения 15 и датчики токов 16, Блоки 14 предназначены для реализации семейств экспериментально полученных выходных электроИзобретение относится к управлению электрическими машинами и может быть использовано при построенииси тем управления силовыми гидрораспре делителями и другими дозирзпощими и регулирующими механизмами, а также систё м электропривода вибрационного действия. Цель изобретения - повышение точ ности воспроизведения заданных движений и расширение области устойчивой работы. На фиг.1 представлена функциональная схема электропривода, включающего электромагнитный двигатель с обмотками управления и подмагничивания на фиг.2 - функциональная схема электропривода, включающего ЛJiнeйный электромагнитный двухобмоточный двигатель; на фиг.З - структурная схема блока функции двух переменных; на фиг.4 - график зависимости требуемого тока от перемещения якоря и создаваемого усилия для одной обмотки; на фиг.З - то же, дл другой обмотки. Электропривод по первому варианту (фиг.1) содержит электромагнитный двигатель с обмотками 1 и 2 под магничивания и обмотками 3 и 4 уп.равления, размещенными на магнитопроводах 5, ферромагнитным якорем 6,жестко закрепленным на немагнитно штоке 7, заключенным в немагнитном корпусе 8, а также датчик 9 положения якоря (ДП) и программный блок (ПБ) 10, своими выходами подключенные к входам регулятора 11 перемеще ния, выходы которого через усилитемеханических характеристик. Быстрые процессы стабилизации заданного положения якоря и парирование возмущений протекают на фоне медленных процессов симметрирования тяговых усилий. Введение блоков 14 и датчиков 16 существенно уменьшает влияние на статику и динамику электропривода нелинейностей электромеханических характеристик и приводит к повышению точности воспроизведения заданных движений. 2 с.п. ф-лы, 5 ил. ли (У) 12 подсоединены к обмоткам 3 и 4 управления. Электропривод содержит также последовательно соединенные источники 13задающих напряжений (ИЗН), блоки 14функций двух переменных (БФДП) и блоки 15 сравнения (БС), выходы которых через У 12 подключены к обмоткам подмагничивания, а другие входы подсоединены к выходам датчиков 16 токов (ДТ). При этом вторые входы БФДП 14 подключены к выходу ДП 9. При использовании двигателя без обмоток подмагничивания электропривод выполняется по второму варианту (фиг.2), при этом в него введены два сумматора 17, а количество У 12 уменьшено на два. ДП 9 может быть, например,индуктивным, емкостным, фотоэлектрическим. Структура регулятора 11 перемещения такая же, как у известного устройства. В качестве ДТ 16 могут быть использованы прецизионные константановые резисторы. ИЗН 13 выполняют функцию задатчиков требуемьпс значений электромагнитных тяговых усилий Fg, Fg, а ПБ 10 является Эадатчиком требуемого закона изменения выходной величины электропривода X (координаты перемещения ферромагнитного якоря 6). Этот блок также может быть выполнен в виде источника задающего напряжения. БФДП 14 предназначены для реализации семейств экспериментально полученных выходных электромеханических характеристик, разрешенных относительно переменных (токи в об3
мотках 1 и 2) t i°(F°, ,х) и1°(Р°,х) Например; значение i на выходе блока 14 является тем значением тока в обмотке 1 подмагничивания при заданном значении координаты х, при котором величина электромагнитного усилителя F также соответствует заданной величине (на выходе блока 13)
,
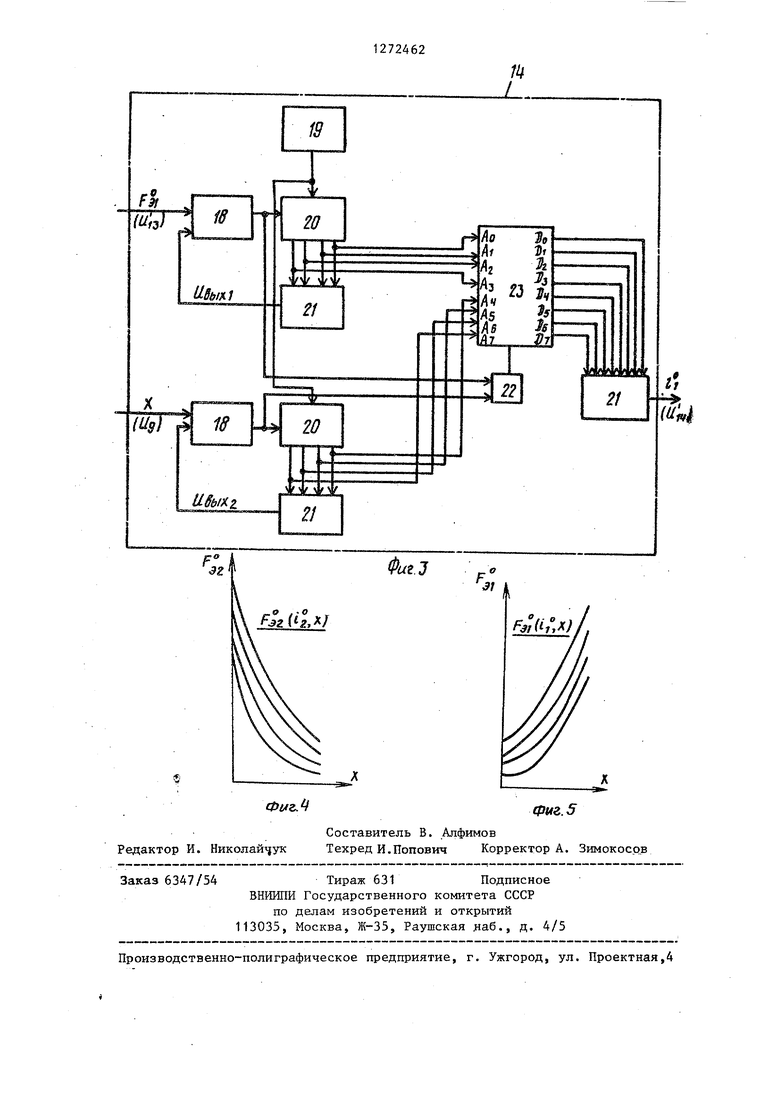
Блоки 14 (фиг.З) содержат компараторы (К) 18, задающий генератор (ЗГ) 19, счетчики (СЧ) 20, Цифроаналоговые преобразователи (ЦАП) 21, логическую схему И 22 и программируемое запоминающее устройство (ПЗУ) 23. Электропривод р-.ботает следующим образом.
Пусть в начальный момент времени У 12 отключены от обмотки двигателя и ферромагнитный якорь 6 находится в правом крайнем положении, т.е. х(0)0. На выходах блоков 13 устанавливают требуемые значения напряжений, соответствующие заданным значениям F° и F° . Пусть, например, F const (механическая нагрузка на якорь), тогда в положении равновесия должно выполняться соотношение
F,, (i ,x)+F(i, ,x) (1)
Из этого соотношения при известной величине F и заданной F° (i, ,х) определяется значение F° (). Таким образом, этим значениям F° , F° соответствуют и устанавливаемые величины напряжений U, , u на выходах ИЗН 13. Далее устанавливают U 0 на выходе ПБ 10 и подключают к обмоткам 1-4 У 12. В результате на выходах БС 15 появляются сигналы рассогласования , Ui5 , воздействие которых на блоки 17 и 12 приводит к появлению соответствующих напряжений и, и на выходах усилителей, возникновению токов i , i в обмотках подмагничивания и нарастанию электромагнитных тяговых усилий до значений, соответствующих уставкам РЭ, и F; .
Эти уставки воздействуют на блоки функции двух переменньсх, действующие следующим образом.
Выходные величины ц F° , ц F и в аналоговой форме поступают на вход К 18, ЗГ 19 запускает СЧ 20, с выходов которых цифровая информация поступает на входы
724624
ЦАП 21, где преобразуется в аналовую форму. Аналоговые сигналы с выходов ЦАП 21 поступают на компараторы 18 и сравниваются с входными 5 величинами. При их совпадении сигнал с выхода К 18 останавливает СЧ 20 и на выходах его фиксируется код, соответствующий входной величине. Этот код с выходов обоих счет0 чиков поступает на адресные входы ПЗУ 23. Если преобразование обеих входных величин закончено, сигналы с выходов К 18, объединенные по схеме И 22, разрешают выборку из ПЗУ 5 23. Очевидно, что в процессе преобразования выборка запрещена. Данные из ПЗУ 23 поступают на выходной ЦАП 21 и преобразуются в аналоговую форму.
20 Рассмотрим, что содержит ПЗУ и каким образом вычисляется его содержание. В результате экспериментов определяется семейство кривых F°, (i° ,х)- F° (i°,x). Разбивают, на5 пример, кривую F (x)/L° const по оси X на 16 равномерных участков, определяют в каждой точке значения F, и X. Используя формулу
51
и, (Ь, - 2- + Ъ,- 2-2 +...+
и
вых +Ь . 2-),
(2)
где Ц , bj,... ,Ь„ - коэффициенты двоичных разрядов, принимающие значение О или 1,
определяют коды, соответствующие значениям аналоговых величин. Получают 16 пар 4-разрядных кодов или 16 байт, которые являются адресами ячеек, где
будет храниться код, соответствующий значению i° . Для перевода i° в цифровую форму используют формулу (2). Всего 8-разрядный адрес ПЗУ позволяет адресовать 256 ячеек памяти. На
кривую, снятую при одном значении i , израсходовано 16 ячеек, следовательно, в данном ПЗУ можно хранить информацию о семействе из 16 кривых. Максимальная частота работы блока 14, выполненного на серийных микросхемах, достигает 50 кГц. Одновременно с блоками 14 функционирует регулятор 11 перемещения, обеспечивая стабилизацию электропривода в заданном состоянии равновесия при . При этом на выходах блока 11 управления выраба,тываются управляющие сигналы, воздействие которых на обмотки управления приводит к возникновению быстрых составляющих магнит ных потоков j, Ф, (в отличие от сравнительно медленно меняющихся на магничивающих потоков Ф, Возникает динамическая составляю щая тягового усилия, пропорциональная разности квадратов результирующих магнитных потоков: Р rU ф ЭР Р Знак и абсолютная величина соответствующего результирующего усилия Fgp зависят от знака и величины силового возмущающего воздействия F|(t), знака и модуля рассогласования Д х°-х. При изменении, задающе го сигнала Ц, x°(t) блок 11 управ ления обеспечивает работу электропривода в следящем режиме, причем изменение сигнала на выходе ДП 9 приводит к соответствующим измене ниям сигналов и и и на выходах, .. 11 ( блоков 14, а также изменениям токов в обмотках 1 и 2. Следовательно, во всем рабочем диапазоне изменения координаты X обеспечнвае.тся выполне ние равенства (1). При этом во всем рабочем диапазоне перемещений обеспечивается одинаковое быстродействие парирования возмущений независи мо от направления их действия. Это объясняется тем, что при любом значении X F const, РЭ„ const и со ответствуют заданным значениям, а именно эти величины в наибольшей степени определяют быстродействие парирования возмущени и величину статизма д электропривода. Быстрые процессы стабилизации заданного положения ферромагнитно го якоря и парирования возмущений протекают на фоне медленных процессов симметрирования равновесных тяговых усилий в силу соотнощения (1) Таким образом, введение блоков 14, 16 и 17с соответствующими связями существенно уменьшает влияние на статику и динамику электропривода нелинейностей электромеханических характеристик и приводит к повьппению точности воспроизведения заданн (вижений и расширению области устой чивости. Формула изобретения 1. Электропривод возвратно-поступательного движения, содержащий линейный электромагнитный двигатель с двумя обмотками управления, двумя обмотками подмагничивания, с ерромагнитным якорем и датчиком положения якоря и устройство управления, включающее программный блок, источники задающих напряжений, блоки сравнения и регулятор перемещения, входы которого соединены с программным блоком и датчиком положения якоря, а выходы через усилители соединены с обмотками управления, отличающийся тем, что, с целью повыщения точности воспроизведения заданных движений и расширения области устойчивой работы, электропривод снабжен датчиками тока в обмотках подмагничивания, двумя блоками функции двух переменных, подключенными к первым входам блоков сравнения, вторые входы которых соединены с датчиками тока, а выходы через усилители мощности соединены с обмотками подмагничивания, к входам каждого блока функции двух переменных под1спючены источник задающего напряжения и датчик положения якоря. 2. Электропривод возвратно-поступательного движения, содержащий линейный электромагнитный двигатель с двумя обмотками, ферромагнитным якорем и датчиком положения якоря, и устройство управления, включающее программный блок, источники задающих напряжений, блоки сравнения и регулятор перемещения, входы которого соединены с программным блоком и датчиком положения якоря, а выходы через усилители связаны с обмотками двигателя, отличающийся тем, что, с целью повышения точности воспроизведения заданных движений и расширения области устойчивой работы, электропривод снабжен датчиками тока в обмотках, двумя сумматорами, двумя блоками функции двух переменных,подключенными к первым входам блоков сравнения, вторые входы которых соединены с датчиками тока, а выходы подключены к первым входам сумматоров, вторые входы которых соединены с выходами регулятора перемещения, выходы сумматоров через усилители мощности соединены с обмотками двигателя, а к входам каждого блока функции двух переменных подключены источник задающего напряжения и датчик положения якоря.
| Испытательная техника | |||
| Справочник | |||
| /Под ред | |||
| В.А | |||
| Клюева | |||
| - М.J Машиностроение, 1982, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
